-
/1101553-item_2413.jpg)
Бортовое радиоэлектронное оборудование ракет VII
Теги:
 termostat
termostat

Ребята! что это за фотики у вас такие? Они что встроеный подогрев атмосферы имеют? ж-)
У меня в Самсунге 2 батарейки по 3 вольта (элементы дурасел 123) раз в год меняю, а в цифровом 4 х AA GP2300 NiMh дак флэш 512 Мб заполняю без проблем и со вспышкой - это 300 фоток примерно, да сколько сразу стираю не удачных.
У меня в Самсунге 2 батарейки по 3 вольта (элементы дурасел 123) раз в год меняю, а в цифровом 4 х AA GP2300 NiMh дак флэш 512 Мб заполняю без проблем и со вспышкой - это 300 фоток примерно, да сколько сразу стираю не удачных.
 инфо
инфо инструменты
инструменты
termostat> Ребята! что это за фотики у вас такие? Они что встроеный подогрев атмосферы имеют? ж-)
termostat> У меня в Самсунге 2 батарейки по 3 вольта (элементы дурасел 123) раз в год меняю, а в цифровом 4 х AA GP2300 NiMh дак флэш 512 Мб заполняю без проблем и со вспышкой - это 300 фоток примерно, да сколько сразу стираю не удачных. [»]
Минольта у меня 7i ,энергию она жрет дай бог
termostat> У меня в Самсунге 2 батарейки по 3 вольта (элементы дурасел 123) раз в год меняю, а в цифровом 4 х AA GP2300 NiMh дак флэш 512 Мб заполняю без проблем и со вспышкой - это 300 фоток примерно, да сколько сразу стираю не удачных. [»]
Минольта у меня 7i ,энергию она жрет дай бог
 Lioxa
Lioxa
А у меня Коника-Минолта Z3 не прожорлива и качество помоему хорошее.

Вопрос: никто не пытался использовать батарейку для БРЭО, а воспламенители запитывать от конденсатора, заряжаемого перед стартом?
По логике, батарейка тогда дольше прослужит...
По логике, батарейка тогда дольше прослужит...
«Внутре! — прошелестел старичок. — Внутре смотрите, где у нее анализатор и думатель…» А. и Б. Стругацкие

Incubus> Вопрос: никто не пытался использовать батарейку для БРЭО, а воспламенители запитывать от конденсатора, заряжаемого перед стартом?
Incubus> По логике, батарейка тогда дольше прослужит... [»]
Не знаю пытались или нет, но ИМХО новая батарейка для воспламенителя, выглядит более надёжно нежели заряженный конденсатор =) Нужна тогда схема подтверждающая необходимый заряд на конденцаторе для воспламенения, по аналогии с фотоспышкой, когда загарается зелёная лампа в "мыльнице".
B)
Incubus> По логике, батарейка тогда дольше прослужит... [»]
Не знаю пытались или нет, но ИМХО новая батарейка для воспламенителя, выглядит более надёжно нежели заряженный конденсатор =) Нужна тогда схема подтверждающая необходимый заряд на конденцаторе для воспламенения, по аналогии с фотоспышкой, когда загарается зелёная лампа в "мыльнице".
B)

Датчик положения на основе сенсора оптической мыши работает. Причём можно его использовать и как датчик Солнца, и как датчик горизонта. В режиме квадратурного выхода его можно подключить к любому микроконтроллеру, что готов пожертвовать четырьмя ножками цифрового ввода на это.
Конечно, оптическая часть датчика требует модификации")
Конечно, оптическая часть датчика требует модификации
 Serge77
Serge77

А.С.> Датчик положения на основе сенсора оптической мыши работает.
Ну ты лаконичен ;^))
Расскажи, как это выглядит, как работает.
Ну ты лаконичен ;^))
Расскажи, как это выглядит, как работает.
А.С.>> Датчик положения на основе сенсора оптической мыши работает.
Serge77> Ну ты лаконичен ;^))
Serge77> Расскажи, как это выглядит, как работает. [»]
Дома сфотаю. Сейчас словесное описание.
Оптическая мышь основана на микросхеме HDNS-2000, это первое поколение таких датчиков. Эта микросхема содержит в себе оптоматрицу, преобразователь, цифровой процессор сигналов (DSP), и интерфейс. Интерфейс может работать в режимах квадратурных датчиков, имитируя обычные мышиные оптопары, и PS/2 мыши, делая, таким образом, всю работу. Режим работы зависит от логического уровня на одной из ножек в момент сброса.
При снятии стандартного "световодо-объектива" с мыши и выпайке подсвечивающего светодиода мышь превращается в камеру-обскуру с полем зрения в 25, примерно, градусов, и разрешением порядка градуса. Перемещение источника света вызывает выдачу сигналов на выходе, при этом неважно, чем подсвечивать, лишь бы источник был яркий и компактный - ЛДС работают крайне плохо. ЛН, особенно, галогенки, - много лучше.
Хотя микросхема и модулирует светодиод, для работы это не необходимо, от источника с постоянной яркостью (ЛН) всё отлично работает. В квадратурном режиме её можно подключить к любому контроллеру, у которого есть четыре ножки на вход, а в режиме PS/2 ножек нужно две, но алгоритм обработки посложнее, да и временной лаг заметнее.
Чтобы обеспечить нужные мне параметры, а это поле зрения 5 градусов и разрешение 10 минут, придётся снять крышку, и установить объектив, фокусное расстояние которого ещё предстоит определить. По оценке, оно равно 23 мм.
При вертикальном старте нужно лишь закрепить датчик или зеркало (подвижное зеркало сделать несколько легче), чтобы Солнце попадало в объектив (ну, или дырку, если объектив не нужен).
Если на борту есть микропроцессор (хотя бы в составе "самого простого высотомера"), он может параллельно контролировать ориентацию ракеты. Если импульсы от датчика идут редко (1-2 в секунду), то ракета сохраняет правильную ориентацию. Если идёт пачка в 5...15 импульсов, это значит, что ракета перевернулась. Для неуправляемых ракет с пассивной стабилизацией этого достаточно.
Я же собираюсь использовать стабилизацию активную, для этого нормально декодировать данные квадратурных датчиков. Такой оптический датчик позволяет корректировать две оси, лишь вдоль той оси, что соединяет ракету и Солнце он может вращаться. Т.е. датчик-то и это ловит, но выдать не может - он предназначен для отслеживания только линейных перемещений мыши, которые у нас выливаются в угловое перемещение Солнца.
Со светосильным объективом, я думаю, он вполне может работать от полной Луны, но это ещё необходимо проверить.
Serge77> Ну ты лаконичен ;^))
Serge77> Расскажи, как это выглядит, как работает. [»]
Дома сфотаю. Сейчас словесное описание.
Оптическая мышь основана на микросхеме HDNS-2000, это первое поколение таких датчиков. Эта микросхема содержит в себе оптоматрицу, преобразователь, цифровой процессор сигналов (DSP), и интерфейс. Интерфейс может работать в режимах квадратурных датчиков, имитируя обычные мышиные оптопары, и PS/2 мыши, делая, таким образом, всю работу. Режим работы зависит от логического уровня на одной из ножек в момент сброса.
При снятии стандартного "световодо-объектива" с мыши и выпайке подсвечивающего светодиода мышь превращается в камеру-обскуру с полем зрения в 25, примерно, градусов, и разрешением порядка градуса. Перемещение источника света вызывает выдачу сигналов на выходе, при этом неважно, чем подсвечивать, лишь бы источник был яркий и компактный - ЛДС работают крайне плохо. ЛН, особенно, галогенки, - много лучше.
Хотя микросхема и модулирует светодиод, для работы это не необходимо, от источника с постоянной яркостью (ЛН) всё отлично работает. В квадратурном режиме её можно подключить к любому контроллеру, у которого есть четыре ножки на вход, а в режиме PS/2 ножек нужно две, но алгоритм обработки посложнее, да и временной лаг заметнее.
Чтобы обеспечить нужные мне параметры, а это поле зрения 5 градусов и разрешение 10 минут, придётся снять крышку, и установить объектив, фокусное расстояние которого ещё предстоит определить. По оценке, оно равно 23 мм.
При вертикальном старте нужно лишь закрепить датчик или зеркало (подвижное зеркало сделать несколько легче), чтобы Солнце попадало в объектив (ну, или дырку, если объектив не нужен).
Если на борту есть микропроцессор (хотя бы в составе "самого простого высотомера"), он может параллельно контролировать ориентацию ракеты. Если импульсы от датчика идут редко (1-2 в секунду), то ракета сохраняет правильную ориентацию. Если идёт пачка в 5...15 импульсов, это значит, что ракета перевернулась. Для неуправляемых ракет с пассивной стабилизацией этого достаточно.
Я же собираюсь использовать стабилизацию активную, для этого нормально декодировать данные квадратурных датчиков. Такой оптический датчик позволяет корректировать две оси, лишь вдоль той оси, что соединяет ракету и Солнце он может вращаться. Т.е. датчик-то и это ловит, но выдать не может - он предназначен для отслеживания только линейных перемещений мыши, которые у нас выливаются в угловое перемещение Солнца.
Со светосильным объективом, я думаю, он вполне может работать от полной Луны, но это ещё необходимо проверить.
Это сообщение редактировалось 10.03.2005 в 12:15
А почему не использовать гироскоп? В данном случае не нужно будет привязываться ко времени пуска, и облачности. Конструкция получиться проще ")
Yuran> А почему не использовать гироскоп? В данном случае не нужно будет привязываться ко времени пуска, и облачности. Конструкция получиться проще
Гироскоп стоит немало. Хороший гироскоп - так даже очень много. Я собираюсь как раз корректировать гироскопы по солнцу, т.к. положение солнца будет известно с точностью в несколько минут, а гироскопы уходят на градус в минуту.
Гироскоп стоит немало. Хороший гироскоп - так даже очень много. Я собираюсь как раз корректировать гироскопы по солнцу, т.к. положение солнца будет известно с точностью в несколько минут, а гироскопы уходят на градус в минуту.
А солнце не выведет из строя сенсор, не будет ли он выходить на нерабочие режимы? Или уже есть практические наработки говорящие об обратном? А то заманчивая преспектива, мышей оптических наломать!
Я в гривнах плохо ориентируюсь но вроде как не такуж и дорого стоят?
Yuran> Я в гривнах плохо ориентируюсь но вроде как не такуж и дорого стоят?
Yuran> 404 Not Found
Ну, на пять примерно помножить - будут цены в рублях. Т.е. 9000-16000 рублей за штучку (за ось). И поставка только под заказ. А ошибку интегрирования всё равно никто не отменял, так что градус в минуту уход всё равно будет. Ну, хорошо, пол-градуса или даже треть градуса. Но у нас активный участок может быть до пяти минут, если мы хотим на орбиту.
Для вертикальных запусков, действительно, такие гироскопы можно не корректировать. Для эээ... настоящих - придётся. Поэтому я взял курс на использование более дешёвых гироскопов от Мюраты (600 рублей за ось) и их коррекцию по солнечному датчику.
Yuran> 404 Not Found
Ну, на пять примерно помножить - будут цены в рублях. Т.е. 9000-16000 рублей за штучку (за ось). И поставка только под заказ. А ошибку интегрирования всё равно никто не отменял, так что градус в минуту уход всё равно будет. Ну, хорошо, пол-градуса или даже треть градуса. Но у нас активный участок может быть до пяти минут, если мы хотим на орбиту.
Для вертикальных запусков, действительно, такие гироскопы можно не корректировать. Для эээ... настоящих - придётся. Поэтому я взял курс на использование более дешёвых гироскопов от Мюраты (600 рублей за ось) и их коррекцию по солнечному датчику.
 a_centaurus
a_centaurus

Хорошая идея, Андрей!
Я несколько лет назад занимался аналогичной разработкой, только используя обычный mоusе, вернее его оптронные пары. Идея была сделать инерциальный датчик положения с маятниковой шторкой по двум осям Х,Y... Штука работала, но требовала доводки по механике. Так до сих пор руки не дошли. Зато довёл датчик на герконе который до сих пор и использую. Для твоей конструкции тебе потребуется объектив типа: МР-2 (F=20 мм, задний отрезок-10 мм, длина 25 мм) или Орион-15, 27 мм, 22 мм, 12 мм, или РО-52, 25 мм, 16 мм, 24 мм... Это киносьёмочные обьективы и их я думаю, можно будет найти в лавках древностей. Только надо будет рассверлить отверстия в корпусе между линзами, чтобы был выход воздуха при падении давления. Также потребуется простая бленда с диафрагмами, лимитирующими поле зрения, поскольку короткофокусные обьективы имеют широкое поле.
А вот идея для обсуждения: оптический датчик-гироскоп с лазером (LED) в карданном маятниковом подвесе. Ось лазера направлена в зенит по оси ракеты. CCD матрица или волоконные системы (волокна вставляются в рассверленные по кругу отверстия и сводятся на приёмную площадку фотодиода) отслеживают траекторию пятна луча лазера при изменении его углового положения при изменениях углов тангажа и рысканья. Правда надо подумать, как демпфировать составляющие реакции опоры подвеса на отрицательные ускорения по осям...
Я несколько лет назад занимался аналогичной разработкой, только используя обычный mоusе, вернее его оптронные пары. Идея была сделать инерциальный датчик положения с маятниковой шторкой по двум осям Х,Y... Штука работала, но требовала доводки по механике. Так до сих пор руки не дошли. Зато довёл датчик на герконе который до сих пор и использую. Для твоей конструкции тебе потребуется объектив типа: МР-2 (F=20 мм, задний отрезок-10 мм, длина 25 мм) или Орион-15, 27 мм, 22 мм, 12 мм, или РО-52, 25 мм, 16 мм, 24 мм... Это киносьёмочные обьективы и их я думаю, можно будет найти в лавках древностей. Только надо будет рассверлить отверстия в корпусе между линзами, чтобы был выход воздуха при падении давления. Также потребуется простая бленда с диафрагмами, лимитирующими поле зрения, поскольку короткофокусные обьективы имеют широкое поле.
А вот идея для обсуждения: оптический датчик-гироскоп с лазером (LED) в карданном маятниковом подвесе. Ось лазера направлена в зенит по оси ракеты. CCD матрица или волоконные системы (волокна вставляются в рассверленные по кругу отверстия и сводятся на приёмную площадку фотодиода) отслеживают траекторию пятна луча лазера при изменении его углового положения при изменениях углов тангажа и рысканья. Правда надо подумать, как демпфировать составляющие реакции опоры подвеса на отрицательные ускорения по осям...
А.С.> Интерфейс может работать в режимах квадратурных датчиков
А что это за режим? Какие данные можно с него получить?
А что это за режим? Какие данные можно с него получить?

Сделать самому приемо-передающую систему для видео, телеметрии, управления мне уже не под силу, пожалуй.
А использовать готовые элементы – вполне.
Рассматривал следующую конструкцию.
Вариант №1
Просто видео (мпег4) через радио Ethernet 802.11b
А использовать готовые элементы – вполне.
Рассматривал следующую конструкцию.
Вариант №1
Просто видео (мпег4) через радио Ethernet 802.11b
Прикреплённые файлы:
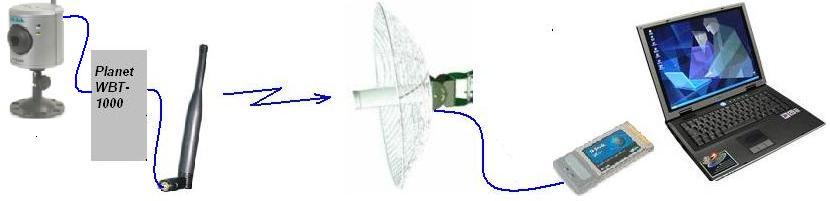
Вариант №2 То же видео + телеметрия с АЦП (датчиков на схеме нет) + управление дискретными выходами на борту. Сам бортовой процессор может выполнять свою программу управления, а наземный ЦУП дублировать.
С предложенными антеннами (5dB+усилитель на борту, 21-24 dB на земле) гарантирую дальность не менее 5 км. Подобную систему (радиочасть) эксплуатировал на одном объекте на этой дальности при значительно худших условиях видимости, чем ракета в небе. Конечно, необходимо отслеживать ее направленной антенной. Но если совместить с оптическим визиром, то это не проблема, диаграмма 8-10 град.
Если грамотный человек сумеет сделать на ракете хорошую антенну, хотя бы еще +5dB, то можно отказаться от усилителя до дальности порядка 2х км. А усилитель это порядка половины цены системы. С усилителем же дальность может возрасти в несколько раз.
На вскидку, несколько ссылок на оборудование.
Первая – МК с Ethernet контроллером и АЦП, интересная вещь.
http://www.cec-mc.ru/comp/ethernet/index.shtml
404 Not Found
404 Not Found
дублировать.С предложенными антеннами (5dB+усилитель на борту, 21-24 dB на земле) гарантирую дальность не менее 5 км. Подобную систему (радиочасть) эксплуатировал на одном объекте на этой дальности при значительно худших условиях видимости, чем ракета в небе. Конечно, необходимо отслеживать ее направленной антенной. Но если совместить с оптическим визиром, то это не проблема, диаграмма 8-10 град.
Если грамотный человек сумеет сделать на ракете хорошую антенну, хотя бы еще +5dB, то можно отказаться от усилителя до дальности порядка 2х км. А усилитель это порядка половины цены системы. С усилителем же дальность может возрасти в несколько раз.
На вскидку, несколько ссылок на оборудование.
Первая – МК с Ethernet контроллером и АЦП, интересная вещь.
http://www.cec-mc.ru/comp/ethernet/index.shtml
404 Not Found
404 Not Found
Прикреплённые файлы:

А.С.>> Интерфейс может работать в режимах квадратурных датчиков
Serge77> А что это за режим? Какие данные можно с него получить?
Квадратурные датчики - это датчики, выдающие два сигнала со сдвигом по фазе на 90 или -90 градусов. По направлению сдвига фазы вычисляется направление перемещения, по количеству перепадов - величина перемещения. Без снятия крышки микросхемы и установки объектива с требуемыми параметрами каждый перепад - это один градус. Т.е. полный период - это 4 градуса. Рисунок ниже показывает сигналы на выходах
Аналогично работает и вторая ось - Y
Serge77> А что это за режим? Какие данные можно с него получить?
Квадратурные датчики - это датчики, выдающие два сигнала со сдвигом по фазе на 90 или -90 градусов. По направлению сдвига фазы вычисляется направление перемещения, по количеству перепадов - величина перемещения. Без снятия крышки микросхемы и установки объектива с требуемыми параметрами каждый перепад - это один градус. Т.е. полный период - это 4 градуса. Рисунок ниже показывает сигналы на выходах
Аналогично работает и вторая ось - Y
Прикреплённые файлы:
А.С.> Квадратурные датчики - это датчики, выдающие два сигнала со сдвигом по фазе на 90 или -90 градусов.
А можно таким датчиком отслеживать малые перемещения луча света, т.е. светового пятна? Я имею в виду, луч направлен на сам датчик.
А можно таким датчиком отслеживать малые перемещения луча света, т.е. светового пятна? Я имею в виду, луч направлен на сам датчик.
А.С.>> Квадратурные датчики - это датчики, выдающие два сигнала со сдвигом по фазе на 90 или -90 градусов.
Serge77> А можно таким датчиком отслеживать малые перемещения луча света, т.е. светового пятна? Я имею в виду, луч направлен на сам датчик. [»]
Можно отслеживать перемещения источника. Т.е. предположим, источник зафиксирован на стене, а датчик движется или поворачивается. Это регистрируется.
Если датчик закреплен, а источник движется, то тоже регистрируется.
А вот, если и датчик, и источник закреплены, но источник поворачивается, и за счёт этого движется зайчик по датчику, то это будет регистрироваться только, когда край зайчика дойдет до дырки в крышке датчика.
Serge77> А можно таким датчиком отслеживать малые перемещения луча света, т.е. светового пятна? Я имею в виду, луч направлен на сам датчик. [»]
Можно отслеживать перемещения источника. Т.е. предположим, источник зафиксирован на стене, а датчик движется или поворачивается. Это регистрируется.
Если датчик закреплен, а источник движется, то тоже регистрируется.
А вот, если и датчик, и источник закреплены, но источник поворачивается, и за счёт этого движется зайчик по датчику, то это будет регистрироваться только, когда край зайчика дойдет до дырки в крышке датчика.
А, вот ещё, что испытал - если поле зрения, получающееся у "обскуры", МАЛО, то его можно увеличить установкой сильной отрицательной линзы вплотную к микросхеме. Я использовал пластмассовую линзу от видоискателя одноразового фотоаппарата-мыльницы. Так можно увеличить поле почти в два раза, это даст возможности избежать настройки на солнце и загрубит чувствительность, возможно, избыточную для небольшой ракеты

Lioxa
втянувшийся
Наконец получил 24LC512 микрухи и поставил её на свою 404 - Nerasta - Not Found тем самым увиличил память в 2 раза (до 64кб).
Сейчас конфигурация БРЭО такая:
Частота кварца 11,0592:
Частота измерений 170/сек.
Памяти хватает на 3 мин.
P.S.
Новю фирмварю выложу чить позже.
Сейчас конфигурация БРЭО такая:
Частота кварца 11,0592:
Частота измерений 170/сек.
Памяти хватает на 3 мин.
P.S.
Новю фирмварю выложу чить позже.
 metero
metero

Lioxa> Наконец получил 24LC512 микрухи и поставил её на свою 404 - Nerasta - Not Found тем самым увиличил память в 2 раза (до 64кб).
Молодец, бьiстро делаеш. Мне бьi твоей енергии....
Я получил сампли датчиков ( за два дня приехали!) , на днях сделаю "растяжение" диапазона 2.5 км на 5V ( операционником). Но, извини, мне все таки не совсем понятно какая у тебя связь между давлением и вьiсотой. Я делаю на мотороллерах , в атмеле не очень разбираюс. Вот и не понимаю как измеряеш- по формулу с логаритмами или по таблице, обясни пожалуйста.
Молодец, бьiстро делаеш. Мне бьi твоей енергии....
Я получил сампли датчиков ( за два дня приехали!) , на днях сделаю "растяжение" диапазона 2.5 км на 5V ( операционником). Но, извини, мне все таки не совсем понятно какая у тебя связь между давлением и вьiсотой. Я делаю на мотороллерах , в атмеле не очень разбираюс. Вот и не понимаю как измеряеш- по формулу с логаритмами или по таблице, обясни пожалуйста.
http://airbase.ru/modelling/rockets/res/users/metero/index.html
повторю много раз здесь предлагаемое:
1) Лучше чтоб БРЭО просто измеряло и запоминало значения, а перевод их в давление делать уже на ПК.
2) бессмысленно растягивать диапазон операционником, так как ошибка датчика 1,5 % а АЦП в АВР имеет 10 бит - т.е. 1024 шага - это 0.1%
3) разрядность АЦП можно увеличить - для этого нужно усреднить количество измерений = (4 в степени кол. увеличения разрядов).
Опять же в полете достаточно запоминать сумму например 4-х измерений - это даст "как бы" 11 битный АЦП результат из них 10 бит "честные" (вместо 9-ти честных в АЦП AVR).
1) Лучше чтоб БРЭО просто измеряло и запоминало значения, а перевод их в давление делать уже на ПК.
2) бессмысленно растягивать диапазон операционником, так как ошибка датчика 1,5 % а АЦП в АВР имеет 10 бит - т.е. 1024 шага - это 0.1%
3) разрядность АЦП можно увеличить - для этого нужно усреднить количество измерений = (4 в степени кол. увеличения разрядов).
Опять же в полете достаточно запоминать сумму например 4-х измерений - это даст "как бы" 11 битный АЦП результат из них 10 бит "честные" (вместо 9-ти честных в АЦП AVR).
Это сообщение редактировалось 17.03.2005 в 11:32
Copyright © Balancer 1997..2018
Создано 01.02.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 01.02.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
