 Ckona
Ckona

 инфо
инфо инструменты
инструменты
 -VMK-
-VMK-
 Брат-2
Брат-2
 shadowjack
shadowjack
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/remove_before.jpg)
Стабилизация Активная - часть II
Теги:
Ckona> 6 атмосфер
Оттянул в сторону маятник и привязал.
Уменьшал угол, пока пшик от 6 атмосфер не дернул платформу.
Угол порядка 18 градусов,
Итого, тяга при давлении 6 атмосфер составляет 3,9 Ньютона.
Оттянул в сторону маятник и привязал.
Уменьшал угол, пока пшик от 6 атмосфер не дернул платформу.
Угол порядка 18 градусов,
Итого, тяга при давлении 6 атмосфер составляет 3,9 Ньютона.


Ckona> 6 атмосфер
И еще одно "спешное" измерение: сброс давления этим клапаном из полуторалитровой бутылке от 6 до 3 ати длится 0,8 с, с 6 до 1 ати длится 2,1 с.
И еще одно "спешное" измерение: сброс давления этим клапаном из полуторалитровой бутылке от 6 до 3 ати длится 0,8 с, с 6 до 1 ати длится 2,1 с.
Ckona> переход в практическую плоскость
Интересно, читает ли Тermostat эту им же созданную тему ?
Потому что вопрос (ниже) задается по его сообщению:
Тermostat> Для устранения накопления ошибки интегрирования - МК переодически измеряет абсолютное положение ракеты по проекциям векторов осевого ускорения ракеты и вектора ускорения св. падения на оси Х и У. Ракетв вертикальна если эти проекции равны 0, при неравенстве 0 вычисляется реальное отклонение от вертикали.
А как во взлетающей ракете раздельно измерить вектор осевого ускорения и вектор ускорения своб.падения ?
Вектор ускорения один, внутри ракеты существуют только проекции этого единственного вектора на оси ракеты.
Как правильно догадываются читатели, сейчас я перепрыгнул на следующую задачу из "святой троицы":
> ... из трех узлов: "инерциальный горизонт", "система управления", "корректирующие пихатели".
Суть вопроса кроется вот в чем.
Если ракета перед стартом была установлена вертикально, то следя за угловыми ускорениями можно определять и парировать отклонения траектории от вертикали. Фактически, это система стабилизации в полете стартового положения ракеты.
А если ракета на старте была установлена под углом ?
Пока не взлетела - "опорное" направление задается вектором земного ускорения.
А в полете, с работающим двигателем ?
Это ж не аэроплан с гировертикалью...
Получается, что для "выравнивания" ракеты после наклонного старта на борту предварительно должна быть зафиксирована ее стартовая ориентация относительно вертикали.
Либо, уже в полете, находить эту вертикаль каким-то другим способом, не по ускорению, а, допустим, по горизонту (контрастной границе небо-земля).
А если опираться на горизонт, так ли уж нужны датчики угловых ускорений ?
А нельзя ли обойтись какой-нибудь дифф.парой светодиодов по каждому направлению ?
C их 15-градусной диаграммой направленности...
Есть же для "летающих игрушек" ИК-датчик горизонта.
А для "взрослых изделий" - ИКВ (датчик ИК-вертикали).
Гм !
Интересно, читает ли Тermostat эту им же созданную тему ?
Потому что вопрос (ниже) задается по его сообщению:
Тermostat> Для устранения накопления ошибки интегрирования - МК переодически измеряет абсолютное положение ракеты по проекциям векторов осевого ускорения ракеты и вектора ускорения св. падения на оси Х и У. Ракетв вертикальна если эти проекции равны 0, при неравенстве 0 вычисляется реальное отклонение от вертикали.
А как во взлетающей ракете раздельно измерить вектор осевого ускорения и вектор ускорения своб.падения ?
Вектор ускорения один, внутри ракеты существуют только проекции этого единственного вектора на оси ракеты.
Как правильно догадываются читатели, сейчас я перепрыгнул на следующую задачу из "святой троицы":
> ... из трех узлов: "инерциальный горизонт", "система управления", "корректирующие пихатели".
Суть вопроса кроется вот в чем.
Если ракета перед стартом была установлена вертикально, то следя за угловыми ускорениями можно определять и парировать отклонения траектории от вертикали. Фактически, это система стабилизации в полете стартового положения ракеты.
А если ракета на старте была установлена под углом ?
Пока не взлетела - "опорное" направление задается вектором земного ускорения.
А в полете, с работающим двигателем ?
Это ж не аэроплан с гировертикалью...
Получается, что для "выравнивания" ракеты после наклонного старта на борту предварительно должна быть зафиксирована ее стартовая ориентация относительно вертикали.
Либо, уже в полете, находить эту вертикаль каким-то другим способом, не по ускорению, а, допустим, по горизонту (контрастной границе небо-земля).
А если опираться на горизонт, так ли уж нужны датчики угловых ускорений ?
А нельзя ли обойтись какой-нибудь дифф.парой светодиодов по каждому направлению ?
C их 15-градусной диаграммой направленности...
Есть же для "летающих игрушек" ИК-датчик горизонта.
А для "взрослых изделий" - ИКВ (датчик ИК-вертикали).
Гм !
Ckona> А нельзя ли обойтись какой-нибудь дифф.парой светодиодов по каждому направлению ?
Тут эта идея уже давно витает, в смысле высказывалась. Но не проверялась.
Тут эта идея уже давно витает, в смысле высказывалась. Но не проверялась.
Ckona>> А нельзя ли обойтись какой-нибудь дифф.парой светодиодов (как датчик горизонта) ?
Serge77> Тут эта идея уже давно витает, в смысле высказывалась. Но не проверялась.
Хорошо, что высказывалась.
На первый взгляд, задача решается.
Однако, Солнце не выключается.
И тут начинается... фасеточные сенсоры, бленды, световоды и прочая скользкая муть.
Serge77> Тут эта идея уже давно витает, в смысле высказывалась. Но не проверялась.
Хорошо, что высказывалась.
На первый взгляд, задача решается.
Однако, Солнце не выключается.
И тут начинается... фасеточные сенсоры, бленды, световоды и прочая скользкая муть.
Ckona> Однако, Солнце не выключается.
Думаю, Солнце не проблема. Если оно попадёт на сенсор, то ничего не испортится, ведь сигнал как был "опустить этот край", так и останется. Главное, чтобы в горизонтальном положении Солнце не попадало на сенсоры, а это легко решается. Конечно, при низком солнце запускать будет нельзя.
Думаю, Солнце не проблема. Если оно попадёт на сенсор, то ничего не испортится, ведь сигнал как был "опустить этот край", так и останется. Главное, чтобы в горизонтальном положении Солнце не попадало на сенсоры, а это легко решается. Конечно, при низком солнце запускать будет нельзя.
Serge77> Думаю, Солнце не проблема.
Собственно говоря - в любом случае половинчатое решение: или строго вертикальная стартовая ориентация (инерциальная система), или бленды+высокое Солнце (оптический горизонт).
Тем более - при прямой засветке знак коррекции "куда надо".
В общем, ты меня убедил - пойти по пути "оптического горизонта".
Тем более при релейном управлении "да-нет".
Собственно говоря - в любом случае половинчатое решение: или строго вертикальная стартовая ориентация (инерциальная система), или бленды+высокое Солнце (оптический горизонт).
Тем более - при прямой засветке знак коррекции "куда надо".
В общем, ты меня убедил - пойти по пути "оптического горизонта".
Тем более при релейном управлении "да-нет".
Ckona> В общем, ты меня убедил - пойти по пути "оптического горизонта".
Не-не, я не убеждал! )))
Я думаю, гироскопы надёжнее и понятнее.
Не-не, я не убеждал! )))
Я думаю, гироскопы надёжнее и понятнее.
Ckona>> В общем, ты меня убедил - пойти по пути "оптического горизонта".
Serge77> Не-не, я не убеждал! )))
Serge77> Я думаю, гироскопы надёжнее и понятнее.
Время, потребное на изготовление собственными силами работающей платы с гироскопами, оцениваю в 9-12 месяцев. С вероятностью успеха 80 процентов. Правда, если учесть - сколько еще надо тестов и доработок для достижения ракетой "Пеликан" безупречных полетов, то ...
Здесь надо заимствовать готовенькое и приспосабливать для своей задачи. Либо объединяться.
Конечно, может пригодиться и механический гироскоп БРАТа-2.
То же самое, на оптическую поделку - 4-7 месяцев. Почти одна и та же схемотехника решит две задачи - локатор Солнца и датчик горизонта.
Третий путь - выбросить "белый флаг", то есть сформулировать требования к сигналам управления и на том ограничиться.
Призрачность цели не одну белку загнала в колесе !
Serge77> Не-не, я не убеждал! )))
Serge77> Я думаю, гироскопы надёжнее и понятнее.
Время, потребное на изготовление собственными силами работающей платы с гироскопами, оцениваю в 9-12 месяцев. С вероятностью успеха 80 процентов. Правда, если учесть - сколько еще надо тестов и доработок для достижения ракетой "Пеликан" безупречных полетов, то ...
Здесь надо заимствовать готовенькое и приспосабливать для своей задачи. Либо объединяться.
Конечно, может пригодиться и механический гироскоп БРАТа-2.
То же самое, на оптическую поделку - 4-7 месяцев. Почти одна и та же схемотехника решит две задачи - локатор Солнца и датчик горизонта.
Третий путь - выбросить "белый флаг", то есть сформулировать требования к сигналам управления и на том ограничиться.
Призрачность цели не одну белку загнала в колесе !

Serge77> Тут эта идея уже давно витает, в смысле высказывалась. Но не проверялась.
Ckona> Хорошо, что высказывалась.
Примерно тук: Българската следа :)
Ckona> Хорошо, что высказывалась.
Примерно тук: Българската следа :)
"Luck is a great time-saver, cost-effective, and very reliable when it works." - Jimmy Yawn



......
Ckona> Третий путь - выбросить "белый флаг", то есть сформулировать требования к сигналам управления и на том ограничиться.
Ckona> Призрачность цели не одну белку загнала в колесе !
Наконец, разумный конец!
Ты не расстраивайся, это не мы глупы, просто в рамках конструкций наших ракет и имеющихся у нас возможностях осуществить задумку не представляется возможным.
Ckona> Третий путь - выбросить "белый флаг", то есть сформулировать требования к сигналам управления и на том ограничиться.
Ckona> Призрачность цели не одну белку загнала в колесе !
Наконец, разумный конец!
Ты не расстраивайся, это не мы глупы, просто в рамках конструкций наших ракет и имеющихся у нас возможностях осуществить задумку не представляется возможным.
Это сообщение редактировалось 19.12.2011 в 20:34
Брат-2> в рамках конструкций наших ракет и имеющихся у нас возможностях осуществить задумку не представляется возможным.
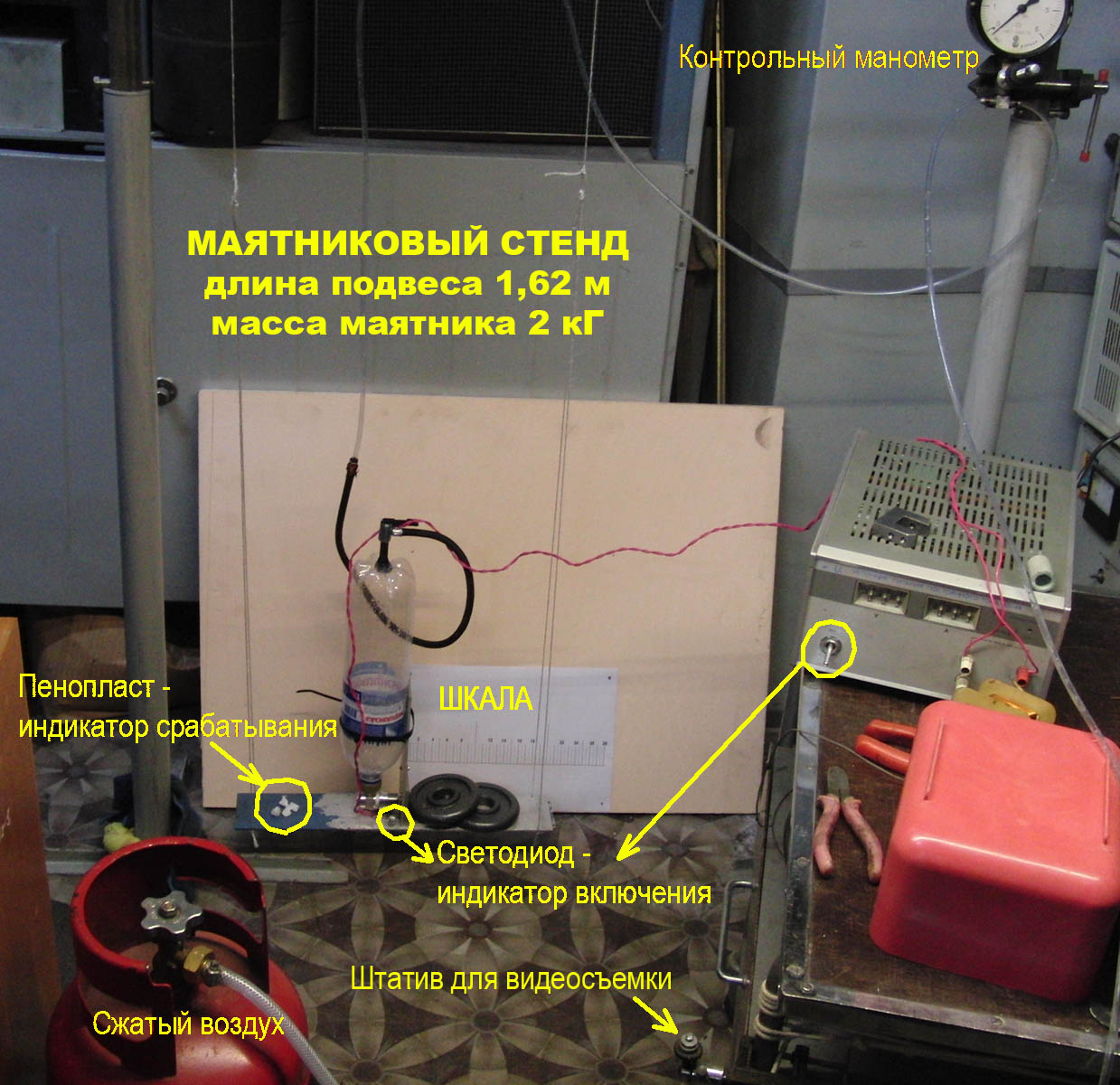
Поэтому я обдумываю каждый последующий шаг, скептически поглядывая на себя со стороны.
Но что в самое темное время года может быть прекраснее баллистического маятника ? (видео 9,5 мБ)
Разве что обработка полученных результатов.
Например: время задержки между подачей напряжения на электромагнит и его срабатыванием составляет 0,135+-0,005 секунды.
Поэтому я обдумываю каждый последующий шаг, скептически поглядывая на себя со стороны.
Но что в самое темное время года может быть прекраснее баллистического маятника ? (видео 9,5 мБ)
Разве что обработка полученных результатов.
Например: время задержки между подачей напряжения на электромагнит и его срабатыванием составляет 0,135+-0,005 секунды.
Прикреплённые файлы:

Ckona>> В общем, ты меня убедил - пойти по пути "оптического горизонта".
Этот путь очень похож на широкую дорогу, ведущую в тупик. Горизонт в наших широтах освещён неравномерно - это раз. Ракета по крену не стабилизирована - это два. Даже если сузить глаза на первые два пункта - моделирование горизонта в лаборатории несопоставимо по своей сложности с моделированием Солнца. Это три.
Всё быстренько поразъезжается в стороны, и шлёпнемся мы уверенно на ж. ))
Я же вам говорю между строк в соседней теме, и уже давно - ну покиньте вы уже свои моторчики, давайте займёмся L3G4200 вместе! Ну очевидное же решение... Шестьдесят гривен цена вопроса - когда такое было возможно???
Этот путь очень похож на широкую дорогу, ведущую в тупик. Горизонт в наших широтах освещён неравномерно - это раз. Ракета по крену не стабилизирована - это два. Даже если сузить глаза на первые два пункта - моделирование горизонта в лаборатории несопоставимо по своей сложности с моделированием Солнца. Это три.
Всё быстренько поразъезжается в стороны, и шлёпнемся мы уверенно на ж. ))
Я же вам говорю между строк в соседней теме, и уже давно - ну покиньте вы уже свои моторчики, давайте займёмся L3G4200 вместе! Ну очевидное же решение... Шестьдесят гривен цена вопроса - когда такое было возможно???
Skype: a_schabanow
Non-conformist> шлёпнемся мы уверенно
Тезка, твои аргументы приняты во внимание.
Сейчас как раз момент принятия решения (по датчикам ориентации), когда нужно заглядывать за горизонт событий.
Почитаю-ка, что это за L3G4200...
Тезка, твои аргументы приняты во внимание.
Сейчас как раз момент принятия решения (по датчикам ориентации), когда нужно заглядывать за горизонт событий.
Почитаю-ка, что это за L3G4200...
Это сообщение редактировалось 20.12.2011 в 15:27

shadowjack
втянувшийся
Non-conformist> Я же вам говорю между строк в соседней теме, и уже давно - ну покиньте вы уже свои моторчики, давайте займёмся L3G4200 вместе! Ну очевидное же решение... Шестьдесят гривен цена вопроса - когда такое было возможно???
Почему именно его? По-моему, 250 град/сек многовато для поперечных осей.
Если кто-то спаяет тестовую плату, готов сделать программную часть на arduino.
А вообще, поддерживаю идею о том, что MEMS-гироскопы - самое перспективное направление на данный момент.
Почему именно его? По-моему, 250 град/сек многовато для поперечных осей.
Если кто-то спаяет тестовую плату, готов сделать программную часть на arduino.
А вообще, поддерживаю идею о том, что MEMS-гироскопы - самое перспективное направление на данный момент.

Во-первых, потому что он у меня уже есть. Даже две штуки. Аргумент неотразимый, согласитесь. ))
На первый взгляд туповат, согласен. Но компетентные специалисты заверили, что его разрешения для данного применения будет выше крыши. К тому же дёшев, цифроват и трёхосен. Последнее - на перспективу, "на вырост".
От Ардуино не отказываемся, ещё раз повторяю! Согласен со всеми доводами, просто я уже сильно далеко ушёл, чтобы пытаться ёрзать туда-сюда...
Ckona, бери плату-носитель гиры от Pololu - и вперёд! Просто забей в Гуголь pololu gyro. В смысле не покупай, а сделай свой аналог. Почитай соседнюю тему, посмотри схемки, что я чертил. Можно, кстати, унифицировать твою платку гиры с моей "материнкой" по разъёмам, чтобы всё было взаимозаменяемо. Мать делай на Ардуино - полностью поддерживаю shadowjack.
На первый взгляд туповат, согласен. Но компетентные специалисты заверили, что его разрешения для данного применения будет выше крыши. К тому же дёшев, цифроват и трёхосен. Последнее - на перспективу, "на вырост".
От Ардуино не отказываемся, ещё раз повторяю! Согласен со всеми доводами, просто я уже сильно далеко ушёл, чтобы пытаться ёрзать туда-сюда...
Ckona, бери плату-носитель гиры от Pololu - и вперёд! Просто забей в Гуголь pololu gyro. В смысле не покупай, а сделай свой аналог. Почитай соседнюю тему, посмотри схемки, что я чертил. Можно, кстати, унифицировать твою платку гиры с моей "материнкой" по разъёмам, чтобы всё было взаимозаменяемо. Мать делай на Ардуино - полностью поддерживаю shadowjack.
Skype: a_schabanow
Модного корпуса гиры не пугайся - сделаем всё в лучшем виде, на дорогом оборудовании (термопрофиль, правильный флюс за сто баков флакон, и т.п.) - здесь нет проблемы.
Skype: a_schabanow
Ckona>>> В общем, ты меня убедил - пойти по пути "оптического горизонта".
Non-conformist> ...Горизонт в наших широтах освещён неравномерно - это раз.
Фотодатчика чувства хоризонта достатъчно точно независимо от положението на слънцето - пробвай.")
Non-conformist> ...Горизонт в наших широтах освещён неравномерно - это раз.
Фотодатчика чувства хоризонта достатъчно точно независимо от положението на слънцето - пробвай.
"Luck is a great time-saver, cost-effective, and very reliable when it works." - Jimmy Yawn
-VMK-> Фотодатчика чувства хоризонта достатъчно точно независимо от положението на слънцето - пробвай.
"Достаточно" - это как? И как поведёт себя система регулирования вертикали при развороте ракеты по крену градусов на сорок пять, к примеру? Думаю, что она воспримет изменения освещённости датчиков как отклонение от вертикали, и корпус наклонится в сторону солнечной стороны... Насколько... Тут действительно, пока не попробуешь - не скажешь. И если вращение по крену продолжится, не пойдёт ли описанный процесс в раскачку?
Застабилизировать же ракету по крену никакими оптическими средствами не представляется возможным.
"Достаточно" - это как? И как поведёт себя система регулирования вертикали при развороте ракеты по крену градусов на сорок пять, к примеру? Думаю, что она воспримет изменения освещённости датчиков как отклонение от вертикали, и корпус наклонится в сторону солнечной стороны... Насколько... Тут действительно, пока не попробуешь - не скажешь. И если вращение по крену продолжится, не пойдёт ли описанный процесс в раскачку?
Застабилизировать же ракету по крену никакими оптическими средствами не представляется возможным.
Skype: a_schabanow
shadowjack> готов сделать программную часть
Non-conformist> сделаем всё в лучшем ... унифицировать ... всё взаимозаменяемо
Господа ! А не пахнет ли тут групповым проектом ?
В общем, после часового размышления, считаю логичным "засветить" такую идею:
закончить с тестовой пшикалкой, описать требования к сигналам управления,
потом, пока ваяется счетверенный "пшик", общими усилиями сотворить ИСС (инерциальную систему стабилизации).
Своими силами я вряд ли ...
А светодиоды на борту гироскопам не помешают.
Non-conformist> сделаем всё в лучшем ... унифицировать ... всё взаимозаменяемо
Господа ! А не пахнет ли тут групповым проектом ?
В общем, после часового размышления, считаю логичным "засветить" такую идею:
закончить с тестовой пшикалкой, описать требования к сигналам управления,
потом, пока ваяется счетверенный "пшик", общими усилиями сотворить ИСС (инерциальную систему стабилизации).
Своими силами я вряд ли ...
А светодиоды на борту гироскопам не помешают.
Non-conformist> Застабилизировать же ракету по крену никакими оптическими средствами не представляется возможным.
По крену - это вращение? Как раз не проблема - любой фотосенсор, глядящий на Солнце. Не единственный сенсор конечно, несколько по кругу. МК удерживает максимально освещённым(освещёнными) тот сенсор, что был максимальным на старте.
По крену - это вращение? Как раз не проблема - любой фотосенсор, глядящий на Солнце. Не единственный сенсор конечно, несколько по кругу. МК удерживает максимально освещённым(освещёнными) тот сенсор, что был максимальным на старте.
Non-conformist> Застабилизировать же ракету по крену никакими оптическими средствами не представляется возможным.
Serge77> Как раз не проблема - любой фотосенсор, глядящий на Солнце. Не единственный сенсор конечно, несколько по кругу. МК удерживает максимально освещённым(освещёнными) тот сенсор, что был максимальным на старте.
Таки да. Это я перепутал со своей крестовиной. Ну, тогда так: оптическая стабилизация по крену возможна с помощью шести фотосенсоров: четырёх датчиков горизонта, и двух - Солнца.
Serge77> Как раз не проблема - любой фотосенсор, глядящий на Солнце. Не единственный сенсор конечно, несколько по кругу. МК удерживает максимально освещённым(освещёнными) тот сенсор, что был максимальным на старте.
Таки да. Это я перепутал со своей крестовиной. Ну, тогда так: оптическая стабилизация по крену возможна с помощью шести фотосенсоров: четырёх датчиков горизонта, и двух - Солнца.
Skype: a_schabanow
Non-conformist> как поведёт себя система регулирования вертикали при развороте ракеты по крену градусов на сорок пять, к примеру?
Да спокойно, как у всех вращающихся ракет. Например, АSAT. Вместе с датчиками поворачиваются и средства управления.
Да спокойно, как у всех вращающихся ракет. Например, АSAT. Вместе с датчиками поворачиваются и средства управления.
shadowjack
втянувшийся
Ckona> Господа ! А не пахнет ли тут групповым проектом ?
Ckona> ...общими усилиями сотворить ИСС (инерциальную систему стабилизации).
Я только за. На чем летать будет (в первую очередь, планируемое время работы двигателя)? Ардуинка у меня есть (большая, правда), плата с 3-мя осями акселерометров и 3-мя осями гиро есть (правда, не под ракетную тему куплена, поэтому диапазоны для этих применений не оптимальные, да и аналоговая она). Даже GPS модуль есть (с ним, еще не разбирался пока). Есть задумки по телеметрии и поиску через zigbee.
Но давайте попробуем самое вкусное - инерциалку сделать. Главное, по башке за это не получить.
Ckona> ...общими усилиями сотворить ИСС (инерциальную систему стабилизации).
Я только за. На чем летать будет (в первую очередь, планируемое время работы двигателя)? Ардуинка у меня есть (большая, правда), плата с 3-мя осями акселерометров и 3-мя осями гиро есть (правда, не под ракетную тему куплена, поэтому диапазоны для этих применений не оптимальные, да и аналоговая она). Даже GPS модуль есть (с ним, еще не разбирался пока). Есть задумки по телеметрии и поиску через zigbee.
Но давайте попробуем самое вкусное - инерциалку сделать. Главное, по башке за это не получить.
Реклама Google — средство выживания форумов :)
Ckona> Господа ! А не пахнет ли тут групповым проектом ?
Я готов участвовать, почему бы и нет... Но только на уровне платы гироскопа. Иначе мне придётся похоронить всё то, что я уже сделал. Это будет выглядеть несколько экстравагантно, я думаю. ))
Я готов участвовать, почему бы и нет... Но только на уровне платы гироскопа. Иначе мне придётся похоронить всё то, что я уже сделал. Это будет выглядеть несколько экстравагантно, я думаю. ))
Skype: a_schabanow
Copyright © Balancer 1997..2018
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
