-
![[image]](https://www.balancer.ru/cache/sites/ru/rl/rl0/img02/pgc/432x288/128x128-crop/52bab465-0ff1-f7d3-0ff1-f7dc549beb78.photo.0.jpg)
Электронное оборудование ракет - БРЭО,часть XIV
Теги:
 mihail66
mihail66

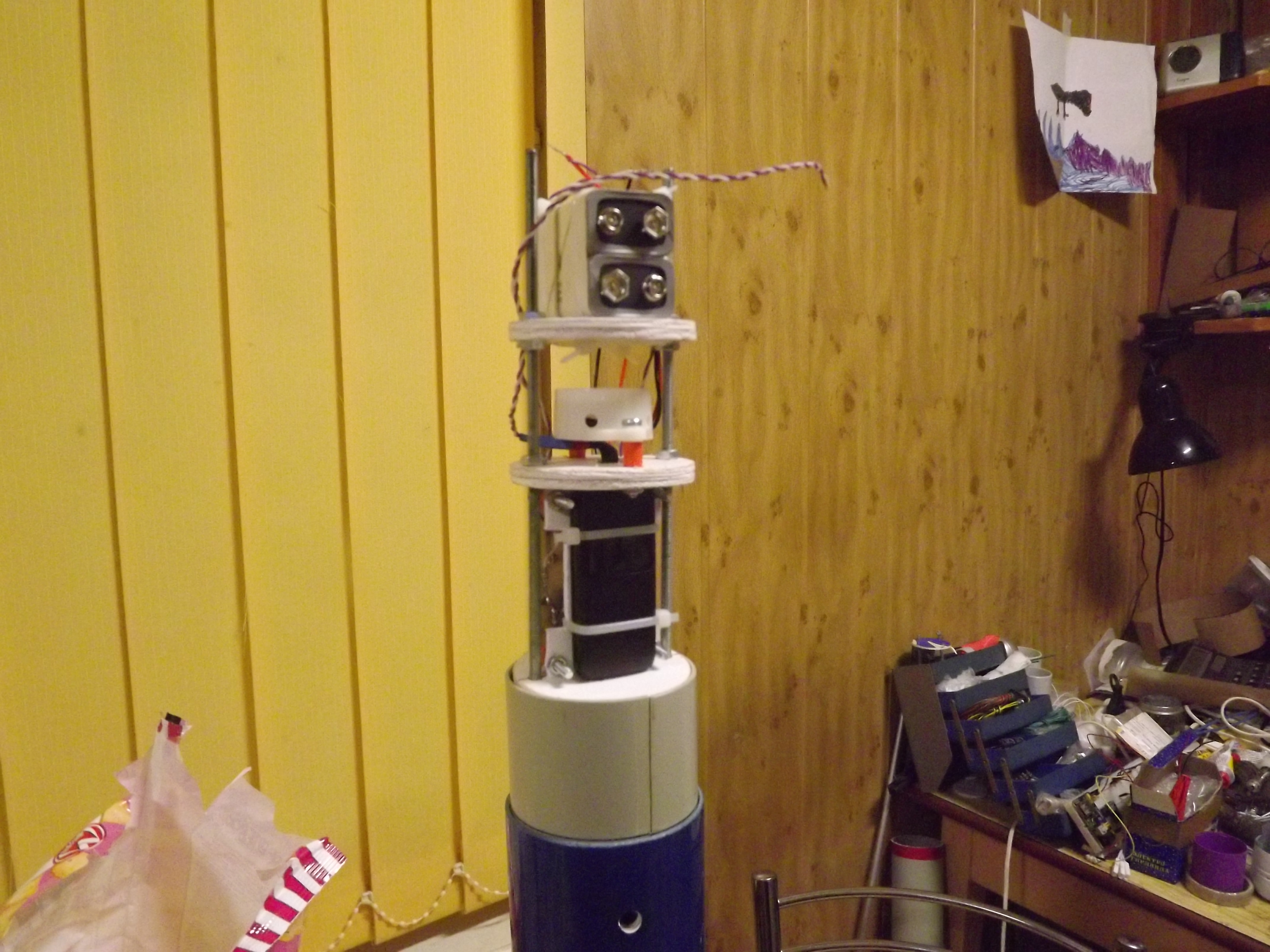
Сваял очередное БРЭО для "двухступки" с GPS и таймером.
Включается от прекращения тяги первой ступени.
(Блин! Уже три аппарата готовы к полету, когда же я их запущу наконец, до моего "Бауконура" только на тракторе.)
Включается от прекращения тяги первой ступени.
(Блин! Уже три аппарата готовы к полету, когда же я их запущу наконец, до моего "Бауконура" только на тракторе.)
Прикреплённые файлы:



 инфо
инфо инструменты
инструменты
Владимир51
новичок
Можете порекомендовать высотомер для ракеты с высотой действия 15-20 км. Пока никак не могу найти в интернете. Очень нужно для исследования. И если для ракет такой высоты действия?



Владимир51> Можете порекомендовать высотомер для ракеты с высотой действия 15-20 км. Пока никак не могу найти в интернете. Очень нужно для исследования. И если для ракет такой высоты действия?
Для таких высот можно жпс-ку использовать.
Для таких высот можно жпс-ку использовать.

Владимир51> Можете порекомендовать высотомер для ракеты с высотой действия 15-20 км.
Вот тут: AIM XTRA GPS flight computer | Entacore Electronics- Advanced GPS tracking flight computer / rocket altimeter.
Вот тут: AIM XTRA GPS flight computer | Entacore Electronics- Advanced GPS tracking flight computer / rocket altimeter.


mihail66> Контакты типа ртутного датчика...
Задолбался с ртутным датчиком экспериментировать над зажиганием третьей ступени.
Для детектирования конца тяги первого мотора он возможно годится,
но в свободном полете капля ртути скачет непредсказуемо, как мячик упругий.
Купил другие, более инерционные, с шариками.
Будем посмотреть.
Или снова к акселерометрам нужно уходить?!
Задолбался с ртутным датчиком экспериментировать над зажиганием третьей ступени.
Для детектирования конца тяги первого мотора он возможно годится,
но в свободном полете капля ртути скачет непредсказуемо, как мячик упругий.
Купил другие, более инерционные, с шариками.
Будем посмотреть.
Или снова к акселерометрам нужно уходить?!
Прикреплённые файлы:



mihail66> Задолбался с ртутным датчиком экспериментировать над зажиганием третьей ступени.
mihail66> Купил другие, более инерционные, с шариками.
mihail66> Будем посмотреть.
Любой инерт. грузик при старте первой сперва внизу, в пассиве, при разделении второй он в верху, при работе двигателя второй, грузик внизу, по окончании работы двигателя и при отделении третьей в паузе он в верху. Кто тот кузнечик, что будет считать эти скачки грузика?
mihail66> Купил другие, более инерционные, с шариками.
mihail66> Будем посмотреть.
Любой инерт. грузик при старте первой сперва внизу, в пассиве, при разделении второй он в верху, при работе двигателя второй, грузик внизу, по окончании работы двигателя и при отделении третьей в паузе он в верху. Кто тот кузнечик, что будет считать эти скачки грузика?

EG54> Любой инерт. грузик при старте первой сперва внизу, в пассиве, при разделении второй он в верху, при работе двигателя второй, грузик внизу, по окончании работы двигателя и при отделении третьей в паузе он в верху. Кто тот кузнечик, что будет считать эти скачки грузика?
Этот "кузнечик" называется счетчик на 561ТМ2.
Беда в другом, я ни как не могу отфильтровать "дребезг", на малой задержке происходят не нужные срабатывания счетчика, при большой задержке затягивается время включения воспламенителей.
Этот "кузнечик" называется счетчик на 561ТМ2.
Беда в другом, я ни как не могу отфильтровать "дребезг", на малой задержке происходят не нужные срабатывания счетчика, при большой задержке затягивается время включения воспламенителей.
 pinko
pinko

mihail66> Беда в другом, я ни как не могу отфильтровать "дребезг", на малой задержке происходят не нужные срабатывания счетчика, при большой задержке затягивается время включения воспламенителей.
У тебе дрезбег всегда короткий чем задержки зажигания? Если да, я показал тебе схему для отфильтроване дребезга (Электронное оборудование ракет - БРЭО,часть XIV [pinko#05.06.17 17:44]) когда дребезг короче чем задержка вторая ступень.
Если нет, тебе нужен другой подход для определения выгорания двигателя. Ты думал вместо грузик, о тонкая проволока в верхней части заряда, которая проволка выгоряет и служит как триггера?
У тебе дрезбег всегда короткий чем задержки зажигания? Если да, я показал тебе схему для отфильтроване дребезга (Электронное оборудование ракет - БРЭО,часть XIV [pinko#05.06.17 17:44]) когда дребезг короче чем задержка вторая ступень.
Если нет, тебе нужен другой подход для определения выгорания двигателя. Ты думал вместо грузик, о тонкая проволока в верхней части заряда, которая проволка выгоряет и служит как триггера?
pinko> У тебе дрезбег всегда короткий чем задержки зажигания? Если да, я показал тебе схему для отфильтроване дребезга (Электронное оборудование ракет - БРЭО,часть XIV [pinko#05.06.17 17:44]) когда дребезг короче чем задержка вторая ступень.
Проволоку я уже делал, работает по времени нестабильно.
Дребезг конечно короткий.
Но "Дребезг" это только название, на самом деле ртутный шарик имеет способность непредсказуемо перемещаться в свободном полете (предположение что он пружинит как мячик).
Поэтому окончание тяги он ловит идеально, а дальше как ему захочется.
Усложнив электронику можно решить эту проблему (например запретить работу второму триггеру, пока он в свободном полете находится). Просто решил более инерционный датчик попробовать.
У меня альтиметр покупной и в нем есть возможность подключить контактный датчик и задержку организовать.
Если не получится с этим инерционником, снова займусь аналоговыми акселерометрами, скоро должны приехать из поднебесной.
Проволоку я уже делал, работает по времени нестабильно.
Дребезг конечно короткий.
Но "Дребезг" это только название, на самом деле ртутный шарик имеет способность непредсказуемо перемещаться в свободном полете (предположение что он пружинит как мячик).
Поэтому окончание тяги он ловит идеально, а дальше как ему захочется.
Усложнив электронику можно решить эту проблему (например запретить работу второму триггеру, пока он в свободном полете находится). Просто решил более инерционный датчик попробовать.
У меня альтиметр покупной и в нем есть возможность подключить контактный датчик и задержку организовать.
Если не получится с этим инерционником, снова займусь аналоговыми акселерометрами, скоро должны приехать из поднебесной.
Это сообщение редактировалось 25.06.2017 в 22:09

mihail66> снова займусь аналоговыми акселерометрами, скоро должны приехать из поднебесной.
Вот это правильно! А какие заказывал?
Вот это правильно! А какие заказывал?
SashaMaks> Вот это правильно! А какие заказывал?
GY-61, на Али 130р. за штуку, заказал 2 штуки еще в начале мая, скоро срок доставки пройдет.
Все еще надеюсь получить.
GY-61, на Али 130р. за штуку, заказал 2 штуки еще в начале мая, скоро срок доставки пройдет.
Все еще надеюсь получить.
mihail66> на самом деле ртутный шарик имеет способность непредсказуемо перемещаться в свободном полете
Пример,как ведет себя жидкость разной плотности в полете.

Пример,как ведет себя жидкость разной плотности в полете.
Air Command Water Rockets Flight Log - Day 185 - Liquids near Zero-G
Australian water rockets built out of common items found around the house. Includes construction details and practical advice. // www.aircommandrockets.com
 a_centaurus
a_centaurus

pinko> Если нет, тебе нужен другой подход для определения выгорания двигателя. Ты думал вместо грузик, о тонкая проволока в верхней части заряда, которая проволка выгоряет и служит как триггера?
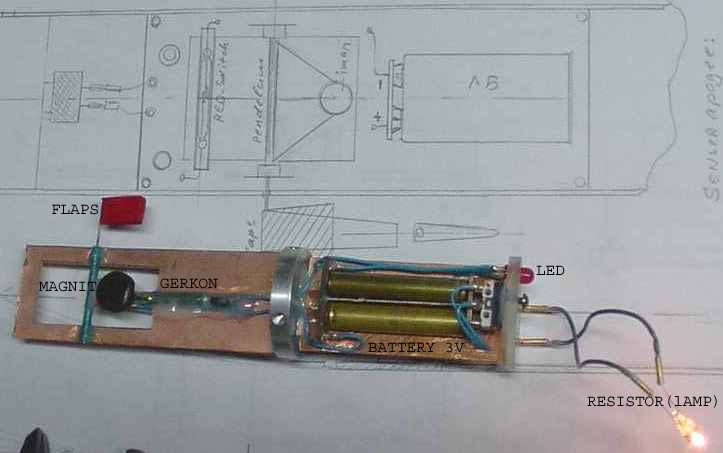
Вот несколько электро-термо-механических бортовых устройств, пригодных для команды "зажигание" двигателя верхней ступени:
1. Удержание пружины активатора лёгкоплавким веществом (парафин), находящимся на передней крышке РДТТ. На эскизе показано устройства для отстрела малой ракеты, но может быть использовано и для активации контакта.
2. "Маятник"-магнит, удерживаемый во время полёта флапсом в нижней мёртвой точке. Когда скорость ракеты (ступени) упадёт ниже скорости набегающего потока, грузик магнит поднимется в ВМТ и замкнёт контакты геркона-триггера.
3. Активатор-поршень на парах спирта, расширяющегося в камере верхней крышки RDTT. Впоследствии был заменён микросвитчем. Delay ок. 2 с. Может калиброваться толщиной стенки или прокладками. Требует станочных работ.
4. Поплавковый флегматизатор на принципе выталкивания жидкости набегающим потоком. В нижней мёртвой точке кольцевой магнит надевается на геркон и замыкает цепь исполнительного устройства.
Вот несколько электро-термо-механических бортовых устройств, пригодных для команды "зажигание" двигателя верхней ступени:
1. Удержание пружины активатора лёгкоплавким веществом (парафин), находящимся на передней крышке РДТТ. На эскизе показано устройства для отстрела малой ракеты, но может быть использовано и для активации контакта.
2. "Маятник"-магнит, удерживаемый во время полёта флапсом в нижней мёртвой точке. Когда скорость ракеты (ступени) упадёт ниже скорости набегающего потока, грузик магнит поднимется в ВМТ и замкнёт контакты геркона-триггера.
3. Активатор-поршень на парах спирта, расширяющегося в камере верхней крышки RDTT. Впоследствии был заменён микросвитчем. Delay ок. 2 с. Может калиброваться толщиной стенки или прокладками. Требует станочных работ.
4. Поплавковый флегматизатор на принципе выталкивания жидкости набегающим потоком. В нижней мёртвой точке кольцевой магнит надевается на геркон и замыкает цепь исполнительного устройства.
Прикреплённые файлы:



Это сообщение редактировалось 26.06.2017 в 20:58
А на этом видео запуск двигателя второй ступени (микрогибрид) от 2 канального таймера, установленного на парашютном отсеке первой ступени (Solaris_2S_Hybrid). Сначала отстреливается отсек с парашютом и второй ступенью, а затем запускается двигатель второй ступени, которая стартует с площадки отсека. Delay - 1 с.
S H 2S st 24 02 09
Ground test of 2 stage hybrid motor ignition jointed with booster parachute/jettison system.
S H 2S st 24 02 09
Ground test of 2 stage hybrid motor ignition jointed with booster parachute/jettison system.
a.c.> Вот несколько электро-термо-механических бортовых устройств, пригодных для команды "зажигание" двигателя верхней ступени:
Спасибо!
Посмотрел, поизучал.
Не понравилось множество механических составляющих.
С акселерометром думаю попроще будет.
Спасибо!
Посмотрел, поизучал.
Не понравилось множество механических составляющих.
С акселерометром думаю попроще будет.
a.c.> А на этом видео запуск двигателя второй ступени (микрогибрид) от 2 канального таймера....
У меня последовательность ровно наоборот.
Так сделано, чтобы от паращютного вышибного еще импульса верхней ступени дать?
У меня последовательность ровно наоборот.
Так сделано, чтобы от паращютного вышибного еще импульса верхней ступени дать?
mihail66> Не понравилось множество механических составляющих.
mihail66> С акселерометром думаю попроще будет.
Никто, ничего, никому не навязывает. Были показаны возможные альтернативные технические решения для старта двигателя верхних ступеней. Механической подход и вправду сложнее и требует на порядок более высокой культуры производства и сборочных навыков исполнителя.
mihail66> Так сделано, чтобы от паращютного вышибного еще импульса верхней ступени дать?
В показанной ракете использовалась инерциальная система выброса парашюта, а не вышибной заряд. Поршень-активатор отбрасывает парашютный сегмент вместе со второй ступенью вперёд, по направлению движения, придавая ей дополнительный импульс, а парашют, закреплённый на первой ступени, вытягивается за счёт её торможения. В подобном устройстве также великое множество механических составляющих:)) Sorry, Leonardo!
mihail66> С акселерометром думаю попроще будет.
Никто, ничего, никому не навязывает. Были показаны возможные альтернативные технические решения для старта двигателя верхних ступеней. Механической подход и вправду сложнее и требует на порядок более высокой культуры производства и сборочных навыков исполнителя.
mihail66> Так сделано, чтобы от паращютного вышибного еще импульса верхней ступени дать?
В показанной ракете использовалась инерциальная система выброса парашюта, а не вышибной заряд. Поршень-активатор отбрасывает парашютный сегмент вместе со второй ступенью вперёд, по направлению движения, придавая ей дополнительный импульс, а парашют, закреплённый на первой ступени, вытягивается за счёт её торможения. В подобном устройстве также великое множество механических составляющих:)) Sorry, Leonardo!
Это сообщение редактировалось 27.06.2017 в 16:48
a.c.> В показанной ракете использовалась инерциальная система выброса парашюта, а не вышибной заряд. Поршень-активатор отбрасывает парашютный сегмент вместе со второй ступенью вперёд, по направлению движения, придавая ей дополнительный импульс, а парашют, закреплённый на первой ступени, вытягивается за счёт её торможения. В подобном устройстве также великое множество механических составляющих:)) Sorry, Leonardo!
У меня другая последовательность.
Сначала отстеливается первая ступень (сразу как тяга кончилась), у второй ступени диаметр меньше, и она продолжает лететь в свободном полете еще 4 сек. Пустая первая ступень имеет бОльшее лобовое сопротивление и уже не мешает полету "первой".
Почему в твоем видео сделано наоборот?! для меня непонятно.
У меня другая последовательность.
Сначала отстеливается первая ступень (сразу как тяга кончилась), у второй ступени диаметр меньше, и она продолжает лететь в свободном полете еще 4 сек. Пустая первая ступень имеет бОльшее лобовое сопротивление и уже не мешает полету "первой".
Почему в твоем видео сделано наоборот?! для меня непонятно.
mihail66> Почему в твоем видео сделано наоборот?! для меня непонятно.
Увы, понятнее, чем написано в тексте, я не могу обьяснить. Как правило, в модельной технике не используют долгие delay между окончанием работы бустера и стартом двигателя второй ступени. По простой причине дестабилизации не динамического полёта 2 ступени, производимой отстрелом 1 ступени. По причине более эффективного выхода второй ступени за счёт "миномётного" старта из замкового пространства соединителя. По причине более быстрого торможения второй ступени в реальной атмосфере с реальной боковой составляющей ветра на высоте разделения, чем предсказано программой. По причине того, что все расчётные программы написаны только для сравнительной оценки возможных сценариев полёта, а вовсе не для слепого повторения. Как правило, выбирается наименьшее возможное время delay, а в большинстве случаев стараются произвести старт дарта или второй моторизированной ступени одновременно с разделением, предпочитая реальную практическую надёжность события - его расчётной красивой вероятности. Это - "from tactics - to practics". Кстати, было бы любопытно узнать логику триггерного устройства запуска второй ступени на акселерометре.
Увы, понятнее, чем написано в тексте, я не могу обьяснить. Как правило, в модельной технике не используют долгие delay между окончанием работы бустера и стартом двигателя второй ступени. По простой причине дестабилизации не динамического полёта 2 ступени, производимой отстрелом 1 ступени. По причине более эффективного выхода второй ступени за счёт "миномётного" старта из замкового пространства соединителя. По причине более быстрого торможения второй ступени в реальной атмосфере с реальной боковой составляющей ветра на высоте разделения, чем предсказано программой. По причине того, что все расчётные программы написаны только для сравнительной оценки возможных сценариев полёта, а вовсе не для слепого повторения. Как правило, выбирается наименьшее возможное время delay, а в большинстве случаев стараются произвести старт дарта или второй моторизированной ступени одновременно с разделением, предпочитая реальную практическую надёжность события - его расчётной красивой вероятности. Это - "from tactics - to practics". Кстати, было бы любопытно узнать логику триггерного устройства запуска второй ступени на акселерометре.
mihail66>> Почему в твоем видео сделано наоборот?! для меня непонятно.
a.c.> .....Кстати, было бы любопытно узнать логику триггерного устройства запуска второй ступени на акселерометре.
Красиво изложено, причем ровно о том что происходит у меня.
При отстреле первой ступени вторая ступень действительно меняет направление траектории, как я полагаю из-за несовершенства стыковочного узла.
Логика разделения предельно проста.
На первой ступени стоит инерционный датчик, и при окончании тяги включает вышибной заряд.
Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
Так задумывалось, но авария произошла. Заказал у китайцев новые акселерометры. Пока они едут, пробовал вместо акселерометра использовать инерционный (ртутный) датчик с таймером для включения второго двигателя. Но работает нестабильно, словно ртуть живет своей жизнью. Не могу отрегулировать время задержки (ртутный шарик скачет как мячик и перезапускает таймер).
a.c.> .....Кстати, было бы любопытно узнать логику триггерного устройства запуска второй ступени на акселерометре.
Красиво изложено, причем ровно о том что происходит у меня.
При отстреле первой ступени вторая ступень действительно меняет направление траектории, как я полагаю из-за несовершенства стыковочного узла.
Логика разделения предельно проста.
На первой ступени стоит инерционный датчик, и при окончании тяги включает вышибной заряд.
Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
Так задумывалось, но авария произошла. Заказал у китайцев новые акселерометры. Пока они едут, пробовал вместо акселерометра использовать инерционный (ртутный) датчик с таймером для включения второго двигателя. Но работает нестабильно, словно ртуть живет своей жизнью. Не могу отрегулировать время задержки (ртутный шарик скачет как мячик и перезапускает таймер).
mihail66> На первой ступени стоит инерционный датчик, и при окончании тяги включает вышибной заряд.
mihail66> Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
mihail66> Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
mihail66>> На первой ступени стоит инерционный датчик, и при окончании тяги включает вышибной заряд.
mihail66>> Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
pinko> Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
По-любому, ракета (модель) в атмосфере на скоростях менее 10-12 м/с считается неустойчивой. И это при прочих благоприятных факторах как конструкции, так и погодных условий. Если я правильно понял, ты построил логику зажигания на постулате 2 перехода от + g на -g? То есть, 2 ступень ракеты, отделившаяся от бустера пинком вышибного заряда, приобрела дополнительное ускорение и летит ("спя") тормозимая аэродинамическим сопротивлением до достижения той самой равнодействующей скоростей, при которой будет конвертация знака ускорения. Но откуда ты знаешь, на какаой реальной скорости это произойдёт? Ты ведь меряешь СМЕНУ знака ускорения, а статическую стабильность ракеты обеспечивает СКОРОСТь. И если она менее тех самых предельных 10-12 (а лучше - 20) м/с зажигание может произойти в позиции ракеты, несовместимой с продолжением полёта по вертикальной траектории. Когда проектировал систему и логику отстрела/зажигания второй ступени ракеты Solaris_2S, перебрал десятки вариантов в разных программах (от Space CAD до Aerolab) и понял, что чем меньше время задержки тем реальнее выше траектория и меньше вероятность неориентированного запуска двигателй. На самом деле на ракетах-зондах 50-60 гг именно по этой причине чаще использовались darts, ввиду их инертности. Дарт сам выходил из узла крепления на бустере после останова движка и торможения 1 ступени. Поэтому я и выбрал во-первых, механизм инерциального разделения бустера с 2 ступенью, через дополнительный пиро-механический пинок, во-вторых, минимальное время задержки (0.1 с) зажигания 2 двигателя, которое реально происходило вместе с зажиганием ПАДа парашютно-бросковой системы. То есть, парашютный контейнер массой в 1 кг летел вертикально вверх вместе с 2 ступенью, когда последняя ещё находилась в соединительном узле, но уже с работающим двигателем (микрогибрид выходит на режим ок.0.2 с) и уходила с такого динамического старта в самостоятельный полёт, когда её скорость превысила скоротст контейнера.
Кроме этого, в конструкции соединительного узла был предусмотрен дефлекторный обьём, позволяющий использовать дополнительно энергию выхлопных газов для выброса 2 ступени (миномётный старт).
В конструкции 2 канального таймера на 556 был предусмотрен его запуск от магнитно-герконной пары после останова двигателя бустера (2 -3 с) что и давало разумный запас инерции для всей системы и разделения ступеней на скорости, достаточной для предотвращения начала рысканья сборки по курсу.
mihail66>> Акселерометр стоит на второй ступени, в ней же стоит счетчик, который считает количество переходов с -G на +G. На втором переходе через значение -1G запускается второй двигатель.
pinko> Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
По-любому, ракета (модель) в атмосфере на скоростях менее 10-12 м/с считается неустойчивой. И это при прочих благоприятных факторах как конструкции, так и погодных условий. Если я правильно понял, ты построил логику зажигания на постулате 2 перехода от + g на -g? То есть, 2 ступень ракеты, отделившаяся от бустера пинком вышибного заряда, приобрела дополнительное ускорение и летит ("спя") тормозимая аэродинамическим сопротивлением до достижения той самой равнодействующей скоростей, при которой будет конвертация знака ускорения. Но откуда ты знаешь, на какаой реальной скорости это произойдёт? Ты ведь меряешь СМЕНУ знака ускорения, а статическую стабильность ракеты обеспечивает СКОРОСТь. И если она менее тех самых предельных 10-12 (а лучше - 20) м/с зажигание может произойти в позиции ракеты, несовместимой с продолжением полёта по вертикальной траектории. Когда проектировал систему и логику отстрела/зажигания второй ступени ракеты Solaris_2S, перебрал десятки вариантов в разных программах (от Space CAD до Aerolab) и понял, что чем меньше время задержки тем реальнее выше траектория и меньше вероятность неориентированного запуска двигателй. На самом деле на ракетах-зондах 50-60 гг именно по этой причине чаще использовались darts, ввиду их инертности. Дарт сам выходил из узла крепления на бустере после останова движка и торможения 1 ступени. Поэтому я и выбрал во-первых, механизм инерциального разделения бустера с 2 ступенью, через дополнительный пиро-механический пинок, во-вторых, минимальное время задержки (0.1 с) зажигания 2 двигателя, которое реально происходило вместе с зажиганием ПАДа парашютно-бросковой системы. То есть, парашютный контейнер массой в 1 кг летел вертикально вверх вместе с 2 ступенью, когда последняя ещё находилась в соединительном узле, но уже с работающим двигателем (микрогибрид выходит на режим ок.0.2 с) и уходила с такого динамического старта в самостоятельный полёт, когда её скорость превысила скоротст контейнера.
Кроме этого, в конструкции соединительного узла был предусмотрен дефлекторный обьём, позволяющий использовать дополнительно энергию выхлопных газов для выброса 2 ступени (миномётный старт).
В конструкции 2 канального таймера на 556 был предусмотрен его запуск от магнитно-герконной пары после останова двигателя бустера (2 -3 с) что и давало разумный запас инерции для всей системы и разделения ступеней на скорости, достаточной для предотвращения начала рысканья сборки по курсу.
Прикреплённые файлы:


Это сообщение редактировалось 27.06.2017 в 21:45
pinko> Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
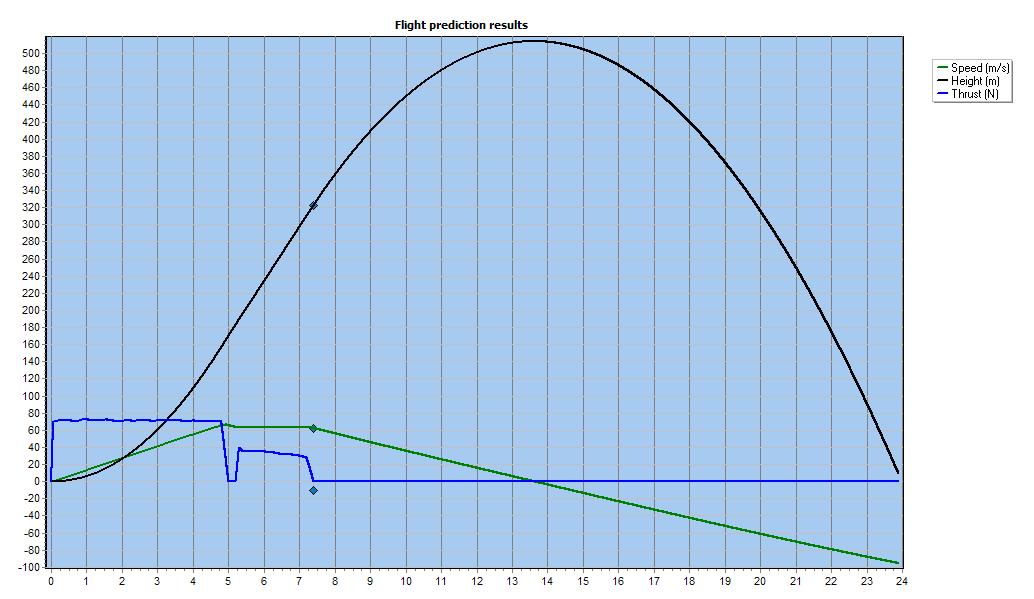
По данным симулятора торможение в инерционном полете достигает -10-12G, поэтому значение -1G случается всегда.
Вышибной заряд достаточно сильный, и всегда обеспечивает переход с "-" на "+", поэтому стоит счетчик который переходы считает, и именно на втором переходе с "-" на "+" запускает второй мотор.
*И еще хочу пояснить. Значение -1G это цифра измеренная акселерометром находящимся в ракете, а не посчитанное значение ускорения для наблюдателя с земли (это -2G). Скорость ракеты при этом около 150м/с.
По данным симулятора торможение в инерционном полете достигает -10-12G, поэтому значение -1G случается всегда.
Вышибной заряд достаточно сильный, и всегда обеспечивает переход с "-" на "+", поэтому стоит счетчик который переходы считает, и именно на втором переходе с "-" на "+" запускает второй мотор.
*И еще хочу пояснить. Значение -1G это цифра измеренная акселерометром находящимся в ракете, а не посчитанное значение ускорения для наблюдателя с земли (это -2G). Скорость ракеты при этом около 150м/с.
Это сообщение редактировалось 28.06.2017 в 09:55
a.c.> По-любому, ракета (модель) в атмосфере на скоростях менее 10-12 м/с считается неустойчивой.
В ответе pinko я дал пояснения относительно значения -1G.
Это значение для системы "акселерометр-ракета", и выбрано потому, что соответствует терминальной скорости ракеты в свободном полете. В интернете часто можно встретить утверждение, что терминальная скорость является оптимальной для запуска второго двигателя для достижения максимальной высоты.
И, во вторых, на значение -1G очень просто настроить БРЭО, перевернув акселерометр вверх ногами и подогнав опорное напряжение компаратора к точке переключения.
Да естественная задержка выхода второго мотора на режим конечно присутствует (у меня она составляет 0,3-0,5 сек.), и для неё делается поправка опорным напряжением компаратора (подбирать приходится экспериментально, но она не сильно влияет, 4,0 или 4,5 сек. свободного полета второй ступени не дают существенной разницы в максимальной высоте).
В действительности мне хочется время задержки еще уменьшить, по причине меньшего отклонения от траектории для второй ступени при её отстреле.
В ответе pinko я дал пояснения относительно значения -1G.
Это значение для системы "акселерометр-ракета", и выбрано потому, что соответствует терминальной скорости ракеты в свободном полете. В интернете часто можно встретить утверждение, что терминальная скорость является оптимальной для запуска второго двигателя для достижения максимальной высоты.
И, во вторых, на значение -1G очень просто настроить БРЭО, перевернув акселерометр вверх ногами и подогнав опорное напряжение компаратора к точке переключения.
Да естественная задержка выхода второго мотора на режим конечно присутствует (у меня она составляет 0,3-0,5 сек.), и для неё делается поправка опорным напряжением компаратора (подбирать приходится экспериментально, но она не сильно влияет, 4,0 или 4,5 сек. свободного полета второй ступени не дают существенной разницы в максимальной высоте).
В действительности мне хочется время задержки еще уменьшить, по причине меньшего отклонения от траектории для второй ступени при её отстреле.
Это сообщение редактировалось 28.06.2017 в 09:56
pinko>> Это не всегда -1g, может быть меньше в зависимости от факторов - т.е. необходимо найти разумное значение. Также в зависимости от того, как делаеш выброс ступени, могут быть неожиданные переходы между +g и -g.
mihail66> По данным симулятора торможение в инерционном полете достигает -10-12G, поэтому значение -1G случается всегда.
Провери свою информацию еще раз, нет такое торможение. В зависимости от угла к земли можно увидеть торможение как менее 1g - здесь есть достаточно реальных графиков для справки.
mihail66> Вышибной заряд достаточно сильный, и всегда обеспечивает переход с "-" на "+", поэтому стоит счетчик который переходы считает, и именно на втором переходе с "-" на "+" запускает второй мотор.
Несомненно есть переход, вопрос в том сколько переходы будет? Но можно ли зажечь двигатель и дать ускорение больше и быстрее, чем замедление после вышибной заряд? Следовательно, у тебе будет несколько переходы для каждой ступень.
mihail66> По данным симулятора торможение в инерционном полете достигает -10-12G, поэтому значение -1G случается всегда.
Провери свою информацию еще раз, нет такое торможение. В зависимости от угла к земли можно увидеть торможение как менее 1g - здесь есть достаточно реальных графиков для справки.
mihail66> Вышибной заряд достаточно сильный, и всегда обеспечивает переход с "-" на "+", поэтому стоит счетчик который переходы считает, и именно на втором переходе с "-" на "+" запускает второй мотор.
Несомненно есть переход, вопрос в том сколько переходы будет? Но можно ли зажечь двигатель и дать ускорение больше и быстрее, чем замедление после вышибной заряд? Следовательно, у тебе будет несколько переходы для каждой ступень.
Copyright © Balancer 1997..2022
Создано 08.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 08.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
