-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Брат-2
Брат-2

Брат-2> Как бы нашел выход. ....
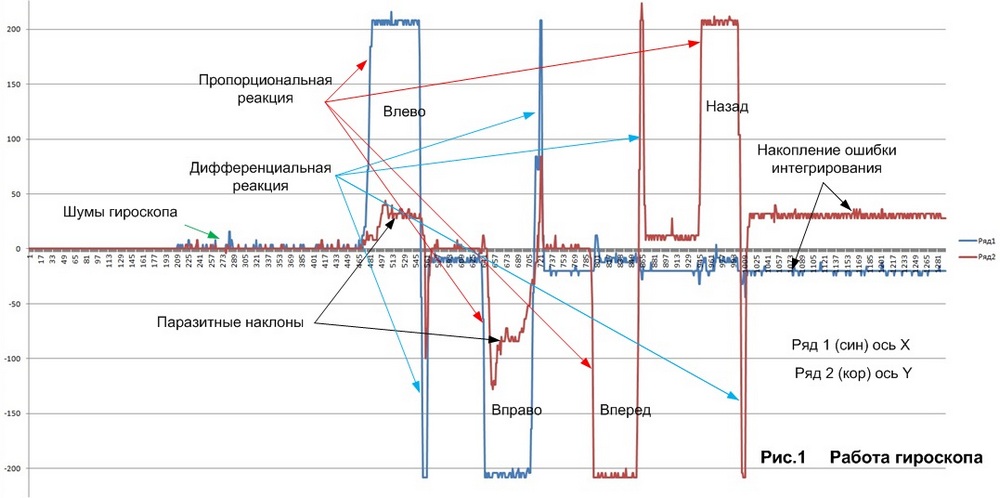
Пока у нас погоды для старта нет, показываю работу моего черного ящика! На вход дополнительного устройства на Arduino Nano 3.0 поступают импульсы сервомеханизмов каналов осей X и Y, причем до подмешивания сигнала оси Z, иначе будет на графике непонятный замес. Данные углов отклонения сервомеханизмов получаются из длительности управляющих импульсов. Схема принимает 90˚ за 0, далее данные записываются на mikroSD 8ГБ. К сожалению, реализовать на Arduino Nano 3.0 более двух каналов записи не представляется возможным, поэтому для записи оси Z необходимо выполнить физическое переключение.
Показанный график получен наклоном руками гироскопа влево – вправо и вперед - назад. Естественно имеются паразитные наклоны по причине неточности движений. Предельные и совокупные углы осей (X+Z и Y+Z) ограничены 20˚, что видно на графике. Наклоны гироскопа делал резкими движениями, поэтому хорошо видна дифференциальная реакция рулей, то есть реализовано ПД-регулирование. От самопроизвольного дрейфа гироскопов избавился полностью, а вот от ошибки накопления при интегрировании углов нет! После манипуляций руками ошибка примерно составила по оси Х=2˚, а по оси Y=3˚, ошибки хорошо видны на графике. Есть надежда, что при реальном полете углы регулирования рулей будут меньше, а соответственно будет меньше и указанная ошибка.
Пока у нас погоды для старта нет, показываю работу моего черного ящика! На вход дополнительного устройства на Arduino Nano 3.0 поступают импульсы сервомеханизмов каналов осей X и Y, причем до подмешивания сигнала оси Z, иначе будет на графике непонятный замес. Данные углов отклонения сервомеханизмов получаются из длительности управляющих импульсов. Схема принимает 90˚ за 0, далее данные записываются на mikroSD 8ГБ. К сожалению, реализовать на Arduino Nano 3.0 более двух каналов записи не представляется возможным, поэтому для записи оси Z необходимо выполнить физическое переключение.
Показанный график получен наклоном руками гироскопа влево – вправо и вперед - назад. Естественно имеются паразитные наклоны по причине неточности движений. Предельные и совокупные углы осей (X+Z и Y+Z) ограничены 20˚, что видно на графике. Наклоны гироскопа делал резкими движениями, поэтому хорошо видна дифференциальная реакция рулей, то есть реализовано ПД-регулирование. От самопроизвольного дрейфа гироскопов избавился полностью, а вот от ошибки накопления при интегрировании углов нет! После манипуляций руками ошибка примерно составила по оси Х=2˚, а по оси Y=3˚, ошибки хорошо видны на графике. Есть надежда, что при реальном полете углы регулирования рулей будут меньше, а соответственно будет меньше и указанная ошибка.
Прикреплённые файлы:


 инфо
инфо инструменты
инструменты
Брат-2>..... то есть реализовано ПД-регулирование. ...
Xan! Вот ты мне доходчиво объяснял по k2, судя по графику работы гироскопа я тебя понял правильно?
Xan! Вот ты мне доходчиво объяснял по k2, судя по графику работы гироскопа я тебя понял правильно?

Брат-2> От самопроизвольного дрейфа гироскопов избавился полностью, а вот от ошибки накопления при интегрировании углов нет! После манипуляций руками ошибка примерно составила по оси Х=2˚, а по оси Y=3˚, ошибки хорошо видны на графике. Есть надежда, что при реальном полете углы регулирования рулей будут меньше, а соответственно будет меньше и указанная ошибка.
Это не ошибка накопления никоим образом. Это неправильная коррекция от влияния линейного ускорения. Или неправильная коррекция от температуры.
Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Попробуй откалибровать гироскоп в горизонтальном положении, потом повернуть боком, и посмотреть на показания.
Это не ошибка накопления никоим образом. Это неправильная коррекция от влияния линейного ускорения. Или неправильная коррекция от температуры.
Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Попробуй откалибровать гироскоп в горизонтальном положении, потом повернуть боком, и посмотреть на показания.

Б.г.> .... Это неправильная коррекция от влияния линейного ускорения. Или неправильная коррекция от температуры.
Да, но блок совместно с гироскопом не испытает линейных ускорений, он вообще линейно не подвижен, и как я выполню коррекцию если совсем не использую акселерометры. Я абсолютно ушел от проблемы самопроизвольного дрейфа и зависимости от температуры, собственно на графике все прямые участки идеально параллельны временной оси, конечно, временной интервал работы не большой, но если в конце этого участка возникла столь большая ошибка, то дрейф был бы заметен на прямых! Калибровка обязательно, поворачиваю на 90˚, показывает примерно 100, что не принципиально.
Б.г.> Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
Все верно, по - другому, ошибка в показании угла поворота по причине неравномерности угловой скорости на участке между опросами.
Б.г.> При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Почему столь категорично отрицаешь ошибку интегрирования угла? Тебя смущает прямоугольный вид управляющего сигнала? Так он обрезан на уровне 20˚ для рулей, а интегрируется замес (в том числе и по причине дребезга гироскопа) типа паразитного отклонения, только больший по величине! Нет, это именно ошибка интегрирования и избавиться от нее можно только с помощью акселерометра, люди так и делают, но не в нашем случае!")
Да, но блок совместно с гироскопом не испытает линейных ускорений, он вообще линейно не подвижен, и как я выполню коррекцию если совсем не использую акселерометры. Я абсолютно ушел от проблемы самопроизвольного дрейфа и зависимости от температуры, собственно на графике все прямые участки идеально параллельны временной оси, конечно, временной интервал работы не большой, но если в конце этого участка возникла столь большая ошибка, то дрейф был бы заметен на прямых! Калибровка обязательно, поворачиваю на 90˚, показывает примерно 100, что не принципиально.
Б.г.> Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
Все верно, по - другому, ошибка в показании угла поворота по причине неравномерности угловой скорости на участке между опросами.
Б.г.> При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Почему столь категорично отрицаешь ошибку интегрирования угла? Тебя смущает прямоугольный вид управляющего сигнала? Так он обрезан на уровне 20˚ для рулей, а интегрируется замес (в том числе и по причине дребезга гироскопа) типа паразитного отклонения, только больший по величине! Нет, это именно ошибка интегрирования и избавиться от нее можно только с помощью акселерометра, люди так и делают, но не в нашем случае!
")
Брат-2> .... (в том числе и по причине дребезга гироскопа) ....
Извиняюсь за неверное выражение! Правильно не дребезг гироскопа, а микрофонный эффект гироскопа! Вероятно здесь в помощь хороший фильтр! Сейчас использую фильтр Калмана с эффективностью ½ уровня шумов. Большую степень фильтрации использовать боюсь, так как любой фильтр сдвигает сигнал по фазе! Опасаюсь выражение «сдвинутый по фазе тормоз» перевести из плоскости обозначения умного человека в чисто физическое явление!
Извиняюсь за неверное выражение! Правильно не дребезг гироскопа, а микрофонный эффект гироскопа! Вероятно здесь в помощь хороший фильтр! Сейчас использую фильтр Калмана с эффективностью ½ уровня шумов. Большую степень фильтрации использовать боюсь, так как любой фильтр сдвигает сигнал по фазе! Опасаюсь выражение «сдвинутый по фазе тормоз» перевести из плоскости обозначения умного человека в чисто физическое явление!

Б.г.>> .... Это неправильная коррекция от влияния линейного ускорения. Или неправильная коррекция от температуры.
Брат-2> Да, но блок совместно с гироскопом не испытает линейных ускорений,
Щас начну материться. Он испытывает проекцию ускорения свободного падения. Трёхосевой гироскоп составлен из трёх отдельных датчиков. У каждого датчика есть ось, где влияние ускорение максимально, и где оно минимально. Когда "же" направлено вдоль оси, где чувствительность максимальна, ноль угловой скорости имеет одно значение. Когда ты его наклоняешь, проекция вдоль оси, где чувствительность максимальна, уменьшается, и ноль сдвигается. Пока он наклонён, будь он даже неподвижен, он принимает кусочек "же" за угловую скорость. И ошибка накапливается. Когда ты его возвращаешь в первоначальное положение, ноль оказывается там же, где был, и ошибка накапливаться перестаёт.
Я этот эффект впервые исследовал ещё в 2006, кажется, году, может, 2007. Потом, каждый раз, получая в руки новый гироскоп, я его опять исследовал, потому что неправильно скорректированная паразитная чувствительность и вызывает поворот ракеты во время работы двигателя!
И каждый раз качественно эффект получался таким же. Другое дело, что в датчиках последних моделей оси чувствительности направлены не по осям кубика, а получаются пересчётом, поэтому максимумы и минимумы оказываются сориентированы по "косым" углам.
Брат-2> и как я выполню коррекцию если совсем не использую акселерометры.
А придётся их использовать! Иначе ракета и будет сворачивать, во время полёта с тягой.
Брат-2> Я абсолютно ушел от проблемы самопроизвольного дрейфа и зависимости от температуры,
Это я здесь и сейчас обсуждать не буду, ладно, на 20 секундных интервалах не должно быть сильно заметно.
Б.г.>> Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
Брат-2> Все верно, по - другому, ошибка в показании угла поворота по причине неравномерности угловой скорости на участке между опросами.
Ну ты посчитай теоретически, чему она МОЖЕТ быть равна, в условиях, которые ты записал. И сравни с тем, сколько ПОЛУЧАЕТСЯ.
Б.г.>> При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Брат-2> Почему столь категорично отрицаешь ошибку интегрирования угла?
Потому что я анализировал её величину и у меня выходило, что за десятки секунд, при отсутствии зашкала гироскопа, она должна быть гораздо меньше. Раз этак в сто.
Брат-2> Да, но блок совместно с гироскопом не испытает линейных ускорений,
Щас начну материться. Он испытывает проекцию ускорения свободного падения. Трёхосевой гироскоп составлен из трёх отдельных датчиков. У каждого датчика есть ось, где влияние ускорение максимально, и где оно минимально. Когда "же" направлено вдоль оси, где чувствительность максимальна, ноль угловой скорости имеет одно значение. Когда ты его наклоняешь, проекция вдоль оси, где чувствительность максимальна, уменьшается, и ноль сдвигается. Пока он наклонён, будь он даже неподвижен, он принимает кусочек "же" за угловую скорость. И ошибка накапливается. Когда ты его возвращаешь в первоначальное положение, ноль оказывается там же, где был, и ошибка накапливаться перестаёт.
Я этот эффект впервые исследовал ещё в 2006, кажется, году, может, 2007. Потом, каждый раз, получая в руки новый гироскоп, я его опять исследовал, потому что неправильно скорректированная паразитная чувствительность и вызывает поворот ракеты во время работы двигателя!
И каждый раз качественно эффект получался таким же. Другое дело, что в датчиках последних моделей оси чувствительности направлены не по осям кубика, а получаются пересчётом, поэтому максимумы и минимумы оказываются сориентированы по "косым" углам.
Брат-2> и как я выполню коррекцию если совсем не использую акселерометры.
А придётся их использовать! Иначе ракета и будет сворачивать, во время полёта с тягой.
Брат-2> Я абсолютно ушел от проблемы самопроизвольного дрейфа и зависимости от температуры,
Это я здесь и сейчас обсуждать не буду, ладно, на 20 секундных интервалах не должно быть сильно заметно.
Б.г.>> Ошибка накопления - это разница между площадью, условно говоря, криволинейной трапеции, и аппроксимирующего её прямоугольника. Т.е. если у нас угловое ускорение 10000 градусов за секунду в квадрате, то, при частоте опроса 100 Гц изменение угловой скорости составит 100 градусов. От нуля до 100 градусов в секунду за 1 отсчёт гироскопа.
Брат-2> Все верно, по - другому, ошибка в показании угла поворота по причине неравномерности угловой скорости на участке между опросами.
Ну ты посчитай теоретически, чему она МОЖЕТ быть равна, в условиях, которые ты записал. И сравни с тем, сколько ПОЛУЧАЕТСЯ.
Б.г.>> При этом, разнонаправленные ускорения эту ошибку сами же и уменьшают.
Брат-2> Почему столь категорично отрицаешь ошибку интегрирования угла?
Потому что я анализировал её величину
и у меня выходило, что за десятки секунд, при отсутствии зашкала гироскопа, она должна быть гораздо меньше. Раз этак в сто.
Б.г.> Щас начну материться.
Андрей! Так закусывать надо!
Ты вот о чем говоришь, об акселерометрах? Так я о гироскопах, которые фиксируют угловую скорость и теоретически не должны реагировать на линейное ускорение ни вдоль оси ни поперек! Нет, нельзя исключить, что есть некое паразитное влияние, но не до такой же степени и что будет при 30g? Нахрена такие гироскопы! Однако напугал. Побежал в гараж, снял БРЭО с подготовленной к старту ракеты, подключился к оси Х через фильтр. Блок стоит вертикально, ось гироскопа горизонтальна, вижу смещение – 460..490, кладу БРЭО на бок, то есть гироскоп поворачиваю на 90˚, когда чувствительность гироскопа по оси Х максимальна. Опять 460..490! Заметного влияния от земного притяжения нет, так и при испытании поворачиваю не на 90˚, а лишь на 30! Не могут блохи столь сильно влиять на ошибку!
Собственно мой вопрос заключался в том, а правильно ли у меня работает система ПД-регулирования?
Андрей! Так закусывать надо!
Ты вот о чем говоришь, об акселерометрах? Так я о гироскопах, которые фиксируют угловую скорость и теоретически не должны реагировать на линейное ускорение ни вдоль оси ни поперек! Нет, нельзя исключить, что есть некое паразитное влияние, но не до такой же степени и что будет при 30g? Нахрена такие гироскопы! Однако напугал.
Побежал в гараж, снял БРЭО с подготовленной к старту ракеты, подключился к оси Х через фильтр. Блок стоит вертикально, ось гироскопа горизонтальна, вижу смещение – 460..490, кладу БРЭО на бок, то есть гироскоп поворачиваю на 90˚, когда чувствительность гироскопа по оси Х максимальна. Опять 460..490! Заметного влияния от земного притяжения нет, так и при испытании поворачиваю не на 90˚, а лишь на 30! Не могут блохи столь сильно влиять на ошибку! Собственно мой вопрос заключался в том, а правильно ли у меня работает система ПД-регулирования?
 Xan
Xan

Брат-2> Заметного влияния от земного притяжения нет, так и при испытании поворачиваю не на 90˚, а лишь на 30!
30 градусов — это уже аж половина — sin(30) = 0.5.
Для каждого гироскопа надо крутить по всем трём осям на 180.
И получится у тебя девять коэффициентов влияния ускорения на смещение угловой скорости.
А потом в полёте делать поправки:
w_x = w_x + k_xx * a_x + k_xy * a_y + k_xz * a_z
w_y = w_y + k_yx * a_x + k_yy * a_y + k_yz * a_z
w_z = w_z + k_zx * a_x + k_zy * a_y + k_zz * a_z
Брат-2> Собственно мой вопрос заключался в том, а правильно ли у меня работает система ПД-регулирования?
Ну вот я там ничего не понял в твоей методе.
30 градусов — это уже аж половина — sin(30) = 0.5.
Для каждого гироскопа надо крутить по всем трём осям на 180.
И получится у тебя девять коэффициентов влияния ускорения на смещение угловой скорости.
А потом в полёте делать поправки:
w_x = w_x + k_xx * a_x + k_xy * a_y + k_xz * a_z
w_y = w_y + k_yx * a_x + k_yy * a_y + k_yz * a_z
w_z = w_z + k_zx * a_x + k_zy * a_y + k_zz * a_z
Брат-2> Собственно мой вопрос заключался в том, а правильно ли у меня работает система ПД-регулирования?
Ну вот я там ничего не понял в твоей методе.


Брат-2> Ты вот о чем говоришь, об акселерометрах? Так я о гироскопах, которые фиксируют угловую скорость и теоретически не должны реагировать на линейное ускорение ни вдоль оси ни поперек!
Святая простота)))
А силу-то они по твоему какую измеряют и каким образом?
Как бы эти гироскопы вообще не сели на перегрузке у хорошей ракеты с РДТТ))) Так они вообще ничего не смогу показать, какой там уход нуля...
Святая простота)))
А силу-то они по твоему какую измеряют и каким образом?
Как бы эти гироскопы вообще не сели на перегрузке у хорошей ракеты с РДТТ))) Так они вообще ничего не смогу показать, какой там уход нуля...
Б.г.>> Щас начну материться.
Брат-2> Андрей! Так закусывать надо!
Брат-2> Ты вот о чем говоришь, об акселерометрах?
Я говорю о гироскопах, у которых есть сдвиг нуля угловой скорости от воздействия земной тяжести.
Брат-2> Так я о гироскопах, которые фиксируют угловую скорость и теоретически не должны реагировать на линейное ускорение ни вдоль оси ни поперек!
Теоретически - ну, не знаю, это зависит от способа обезвешивания резонатора. Практически - все реагируют.
Брат-2> Нет, нельзя исключить, что есть некое паразитное влияние, но не до такой же степени и что будет при 30g?
При 30g будет п....ц. Особенно, если зашкалят акселерометры и неоткуда будет брать сигнал для коррекции.
Брат-2> Нахрена такие гироскопы!
"За копейку канарейку, и чтоб пела басом" ©. "Не такие" (например, волоконно-оптические) имеют паразитную чувствительность к магнитному полю Земли, например...
Брат-2> Однако напугал. Побежал в гараж, снял БРЭО с подготовленной к старту ракеты, подключился к оси Х через фильтр. Блок стоит вертикально, ось гироскопа горизонтальна, вижу смещение – 460..490, кладу БРЭО на бок, то есть гироскоп поворачиваю на 90˚, когда чувствительность гироскопа по оси Х максимальна. Опять 460..490!
Так 460 или 490? А если усреднить за 30 секунд, сколько получается в повёрнутом и неповёрнутом случае?
Брат-2> Заметного влияния от земного притяжения нет, так и при испытании поворачиваю не на 90˚, а лишь на 30! Не могут блохи столь сильно влиять на ошибку!
Гораздо сильнее, чем "накопление ошибки интегрирования". Я не первый год занимаюсь этим вопросом, уж извини, и тут-то я собаку съел.
Брат-2> Андрей! Так закусывать надо!
Брат-2> Ты вот о чем говоришь, об акселерометрах?
Я говорю о гироскопах, у которых есть сдвиг нуля угловой скорости от воздействия земной тяжести.
Брат-2> Так я о гироскопах, которые фиксируют угловую скорость и теоретически не должны реагировать на линейное ускорение ни вдоль оси ни поперек!
Теоретически - ну, не знаю, это зависит от способа обезвешивания резонатора. Практически - все реагируют.
Брат-2> Нет, нельзя исключить, что есть некое паразитное влияние, но не до такой же степени и что будет при 30g?
При 30g будет п....ц. Особенно, если зашкалят акселерометры и неоткуда будет брать сигнал для коррекции.
Брат-2> Нахрена такие гироскопы!
"За копейку канарейку, и чтоб пела басом" ©. "Не такие" (например, волоконно-оптические) имеют паразитную чувствительность к магнитному полю Земли, например...
Брат-2> Однако напугал.
Побежал в гараж, снял БРЭО с подготовленной к старту ракеты, подключился к оси Х через фильтр. Блок стоит вертикально, ось гироскопа горизонтальна, вижу смещение – 460..490, кладу БРЭО на бок, то есть гироскоп поворачиваю на 90˚, когда чувствительность гироскопа по оси Х максимальна. Опять 460..490! Так 460 или 490? А если усреднить за 30 секунд, сколько получается в повёрнутом и неповёрнутом случае?
Брат-2> Заметного влияния от земного притяжения нет, так и при испытании поворачиваю не на 90˚, а лишь на 30! Не могут блохи столь сильно влиять на ошибку!
Гораздо сильнее, чем "накопление ошибки интегрирования". Я не первый год занимаюсь этим вопросом, уж извини, и тут-то я собаку съел.
SashaMaks> Как бы эти гироскопы вообще не сели на перегрузке у хорошей ракеты с РДТТ))) Так они вообще ничего не смогу показать, какой там уход нуля...
"Садятся" на бампер аналог-девайсовские гироскопы при примерно 100 g, это я выяснял у Марка Луни непосредственно. Но линейность портится несколько раньше, при 60-70 g, это я выяснял уже экспериментально.
Вообще, у некоторых гироскопов уже при 5-10 g появляется кубический член в компенсации, до 5 g у всех всё линейно. Причём, 5 или 10 - зависит от экземпляра, граница разная у разных экземпляров одного типа.
Проблема ещё и в том, что у некоторых моделей неотключаемая коррекция от внутренних акселерометров, и она перестаёт работать, когда акселерометры зашкаливают.
"Садятся" на бампер аналог-девайсовские гироскопы при примерно 100 g, это я выяснял у Марка Луни непосредственно. Но линейность портится несколько раньше, при 60-70 g, это я выяснял уже экспериментально.
Вообще, у некоторых гироскопов уже при 5-10 g появляется кубический член в компенсации, до 5 g у всех всё линейно. Причём, 5 или 10 - зависит от экземпляра, граница разная у разных экземпляров одного типа.
Проблема ещё и в том, что у некоторых моделей неотключаемая коррекция от внутренних акселерометров, и она перестаёт работать, когда акселерометры зашкаливают.
Это сообщение редактировалось 29.09.2017 в 15:37
Б.г.> Так 460 или 490? А если усреднить за 30 секунд, сколько получается в повёрнутом и неповёрнутом случае?
Ну, да, не усреднял, сравнение на глазок. Ну, на Луну мне не лететь, что есть тому и рады!
Ну, на Луну мне не лететь, что есть тому и рады!
Короче, в субботу, по прогнозам, у нас ветровое окно, постараюсь выполнить старт! Запишу работу рулевых машинок по осям X и Y, направлю бортовую камеру на рули вверх, ну и сделаю внешнюю съемку старта!
Может, кто осведомлен, каков принцип перехода на три руля от четырех? Если можно поясните в общих чертах!
Ну, да, не усреднял, сравнение на глазок.
 Ну, на Луну мне не лететь, что есть тому и рады!
Ну, на Луну мне не лететь, что есть тому и рады! Короче, в субботу, по прогнозам, у нас ветровое окно, постараюсь выполнить старт! Запишу работу рулевых машинок по осям X и Y, направлю бортовую камеру на рули вверх, ну и сделаю внешнюю съемку старта!
Может, кто осведомлен, каков принцип перехода на три руля от четырех? Если можно поясните в общих чертах!
 Xan
Xan
Брат-2> Может, кто осведомлен, каков принцип перехода на три руля от четырех? Если можно поясните в общих чертах!
Вот у тебя есть после арифметики вычисленные сигналы управления по X и Y — s_x, s_y.
Тогда на машинку руля, стоящего под углом a, надо подавать такой сигнал:
s_a = s_x * cos(a) + s_y * sin(a)
Ну и после того, как всё соберёшь, надо включить управление, взять ракету в руки и покачать её в разные стороны.
И посмотреть, в правильные ли стороны отклоняются рули.
В частности, если отклонять ракету в плоскости одного из стабилизаторов, то этот стабилизатор шевелиться не должен.
Вот у тебя есть после арифметики вычисленные сигналы управления по X и Y — s_x, s_y.
Тогда на машинку руля, стоящего под углом a, надо подавать такой сигнал:
s_a = s_x * cos(a) + s_y * sin(a)
Ну и после того, как всё соберёшь, надо включить управление, взять ракету в руки и покачать её в разные стороны.
И посмотреть, в правильные ли стороны отклоняются рули.
В частности, если отклонять ракету в плоскости одного из стабилизаторов, то этот стабилизатор шевелиться не должен.
Xan> Вот у тебя есть после арифметики вычисленные сигналы управления по X и Y — s_x, s_y.
....
Спасибо Xan! Все понятно. Вдруг получится, надо будет переходить на три руля, а своих мыслей нет!
....
Спасибо Xan! Все понятно. Вдруг получится, надо будет переходить на три руля, а своих мыслей нет!
Брат-2> Короче, в субботу, ..., постараюсь выполнить старт! .....
Уже две недели в отпуске, начали ремонт в квартире, тем не менее!
Сегодня 30.09.17г в нашей местности ветер уменьшился до 5 м/с, +20˚С, решил осуществить управляемый старт на гидропневматической ракете. Объем полный - 4,5 л, воды-1,3 л, давление – 6 ат, сопло – 8 мм, старт без направляющей. На стартовом столе потерял поводок привода дистанционного старта, осуществил запуск в ручном режиме. Все хорошо, но точка наблюдения за полетом ракеты оказалась весьма неудачной. Ракета стартовала вертикально, несмотря на относительную небольшую скорость подъема ( маленькое сопло, небольшое давление, вода с избытком), взлет был стабильным, на глаз вертикальным без виляний стабилизатором! Известно, что гидропневматическая ракета на старте в принципе не имеет статической устойчивости, по причине большой массы воды. Собственно в обозначенных параметрах запущенной ракеты, выполнить вертикальный старт не представляется возможным! Апогей не большой 55 м, выброс парашюта штатный, но далее страшный сон ракетчика! Парашют запутался за рули и не раскрылся! В результате лобовое столкновение с землей! Однако конструктивные особенности головной части позволили минимизировать разрушения! Полностью смят парашютный контейнер, у одной сервомашинки слизало зубья редуктора, все! Блок БРЭО не пострадал, при ударе вылетели все mikroSD, но они остались в корпусе, запись сохранилась! Есть основания предположить, что гиростабилизация была, однако проявились и проблемы!
Парашют запутался за рули и не раскрылся! В результате лобовое столкновение с землей! Однако конструктивные особенности головной части позволили минимизировать разрушения! Полностью смят парашютный контейнер, у одной сервомашинки слизало зубья редуктора, все! Блок БРЭО не пострадал, при ударе вылетели все mikroSD, но они остались в корпусе, запись сохранилась! Есть основания предположить, что гиростабилизация была, однако проявились и проблемы!
Видео старта: Облако Mail.Ru
Уже две недели в отпуске, начали ремонт в квартире, тем не менее!
Сегодня 30.09.17г в нашей местности ветер уменьшился до 5 м/с, +20˚С, решил осуществить управляемый старт на гидропневматической ракете. Объем полный - 4,5 л, воды-1,3 л, давление – 6 ат, сопло – 8 мм, старт без направляющей. На стартовом столе потерял поводок привода дистанционного старта, осуществил запуск в ручном режиме. Все хорошо, но точка наблюдения за полетом ракеты оказалась весьма неудачной. Ракета стартовала вертикально, несмотря на относительную небольшую скорость подъема ( маленькое сопло, небольшое давление, вода с избытком), взлет был стабильным, на глаз вертикальным без виляний стабилизатором! Известно, что гидропневматическая ракета на старте в принципе не имеет статической устойчивости, по причине большой массы воды. Собственно в обозначенных параметрах запущенной ракеты, выполнить вертикальный старт не представляется возможным! Апогей не большой 55 м, выброс парашюта штатный, но далее страшный сон ракетчика!
 Парашют запутался за рули и не раскрылся! В результате лобовое столкновение с землей! Однако конструктивные особенности головной части позволили минимизировать разрушения! Полностью смят парашютный контейнер, у одной сервомашинки слизало зубья редуктора, все! Блок БРЭО не пострадал, при ударе вылетели все mikroSD, но они остались в корпусе, запись сохранилась! Есть основания предположить, что гиростабилизация была, однако проявились и проблемы!
Парашют запутался за рули и не раскрылся! В результате лобовое столкновение с землей! Однако конструктивные особенности головной части позволили минимизировать разрушения! Полностью смят парашютный контейнер, у одной сервомашинки слизало зубья редуктора, все! Блок БРЭО не пострадал, при ударе вылетели все mikroSD, но они остались в корпусе, запись сохранилась! Есть основания предположить, что гиростабилизация была, однако проявились и проблемы!Видео старта: Облако Mail.Ru
Прикреплённые файлы:
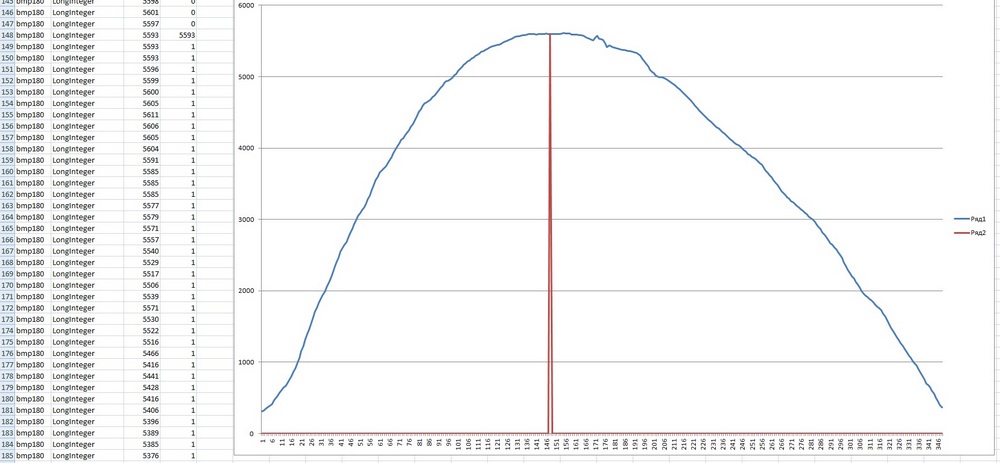
Показания черного ящика.
Прикреплённые файлы:
 Ignis Caelum
Ignis Caelum

Б.г.> Вообще, у некоторых гироскопов уже при 5-10 g появляется кубический член в компенсации, до 5 g у всех всё линейно.
А как ты 10 и более g давал , для оценки ошибки?
интересно инженерное решение.
А как ты 10 и более g давал , для оценки ошибки?
интересно инженерное решение.
Б.г.>> Вообще, у некоторых гироскопов уже при 5-10 g появляется кубический член в компенсации, до 5 g у всех всё линейно.
I.C.> А как ты 10 и более g давал , для оценки ошибки?
I.C.> интересно инженерное решение.
Натягивал две лески параллельно с балкона до земли, и пускал по ним на проволочных колечках, а внизу на леске был надет поролоновый кубик 15х15х15 см на высоте где-то полуметра от земли. Плата втыкалась в него, сначала он гасил трением об леску, потом сжатием об землю. Чем меньше высота кубика над землёй, тем выше пик ускорения
Поскольку у меня всё всегда питается от аккумуляторов и записывается в датафлэш, никаких проблем с такой процедурой не было.
Я сначала хотел сделать металлическую направляющую из 8 мм трубочки из АД31, но хранить цельную было негде, пришлось ограничиться леской для триммера - она треугольная, плата меньше вихляется, и прочнее на разрыв, чем любая другая, что у меня была.
I.C.> А как ты 10 и более g давал , для оценки ошибки?
I.C.> интересно инженерное решение.
Натягивал две лески параллельно с балкона до земли, и пускал по ним на проволочных колечках, а внизу на леске был надет поролоновый кубик 15х15х15 см на высоте где-то полуметра от земли. Плата втыкалась в него, сначала он гасил трением об леску, потом сжатием об землю. Чем меньше высота кубика над землёй, тем выше пик ускорения
Поскольку у меня всё всегда питается от аккумуляторов и записывается в датафлэш, никаких проблем с такой процедурой не было.
Я сначала хотел сделать металлическую направляющую из 8 мм трубочки из АД31, но хранить цельную было негде, пришлось ограничиться леской для триммера - она треугольная, плата меньше вихляется, и прочнее на разрыв, чем любая другая, что у меня была.
Брат-2>> Короче, в субботу, ..., постараюсь выполнить старт! .....
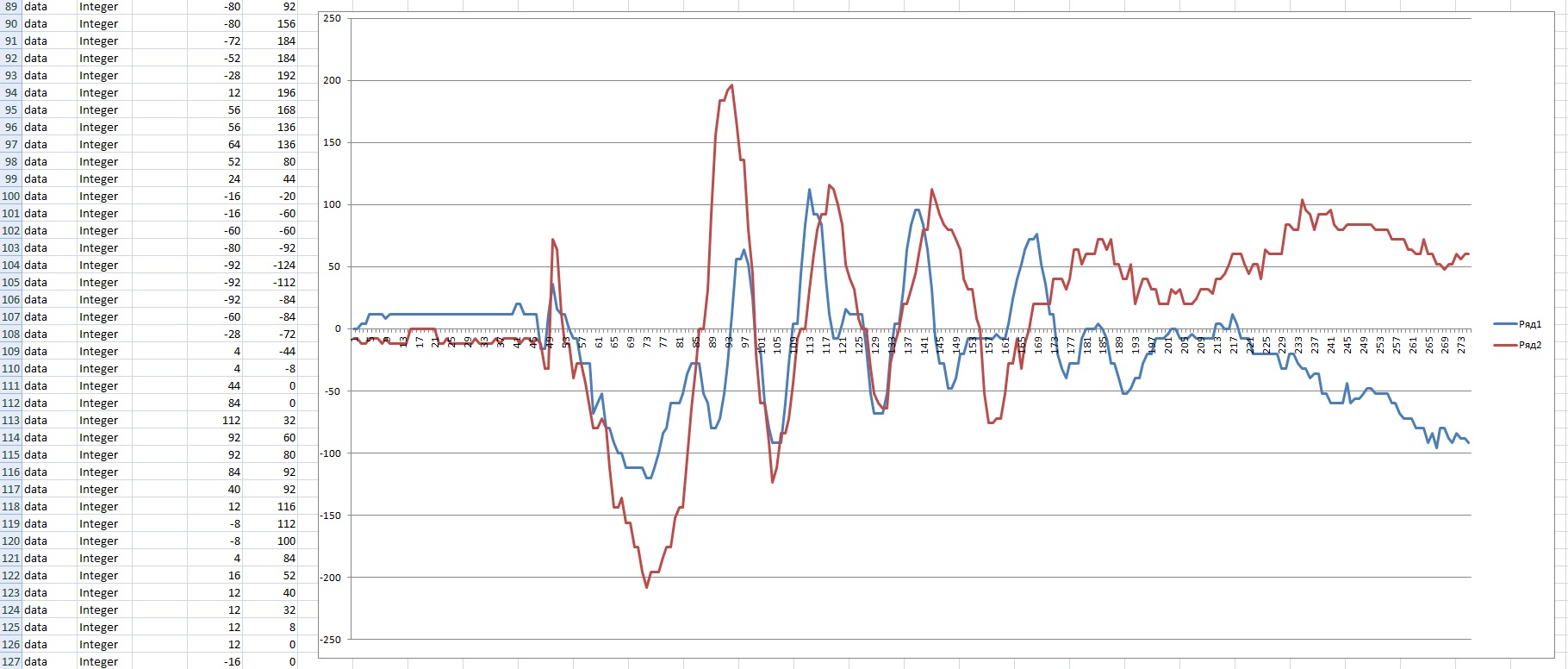
Старт, к сожалению, вышел не совсем удачный, и тем не менее, очень вероятно, что гиростабилизация ракеты была! Однако, у меня оптимизма результаты старта не вызвали, так как проявились системные проблемы! Если гироскоп неподвижен, то рули нормально становятся в исходное положение и стоят неподвижно любое, продолжительное время. Но гироскоп установлен на ракете, которая интенсивно колебалась (с малой амплитудой) под порывами ветра, причем, колебания были явно ассиметричны относительно «0», при этом все рули достаточно быстро уходят с нулевой позиции. Совершенно очевидно, что это проявление ошибки накопления! Управляемый полет длился не более 4 сек, вероятно это предел, не густо!
Так как проблема ошибки накопления при использовании только гироскопов неразрешима, то решил проверить вариант гиростабилизации с использованием собственных аппаратных средств самого чипа MPU6050. Найти достоверной информации о работе указанного узла микросхемы не удалось, известно лишь, что в нем осуществляется фильтрация, сбор и обработка сигналов от 3-х гироскопов и акселерометров, вывод готовых результатов. Обработанные данные выводятся по запросу по входу INT MPU6050, частота запроса 66Гц (измерил). Для подобных целей есть библиотека MPU6050 6Axis MotionApps20, однако в ней есть только вывод заумных данных типа кватернионов углов Эйлера и.т.п, но вывода элементарной угловой скорости гироскопов нет! Пришлось добавить MPU6050 Н, вывести угловую скорость для осуществления PD-регулирования. При этом оказалось, что можно легко создать «черный ящик» соединив с Arduino и картридж mikroSD по SPI. В данном случае однозначно по осям XY задействованы акселерометры, возникают сомнения, но это фирменное решение, квадракоптеры и самолеты летают, и их не косит! Есть и проблемы с осью Z, так как дополнительно необходимо использовать компас, но это уже терпимая проблема! Короче, проведу испытание именно этого варианта управления!
Старт, к сожалению, вышел не совсем удачный, и тем не менее, очень вероятно, что гиростабилизация ракеты была! Однако, у меня оптимизма результаты старта не вызвали, так как проявились системные проблемы! Если гироскоп неподвижен, то рули нормально становятся в исходное положение и стоят неподвижно любое, продолжительное время. Но гироскоп установлен на ракете, которая интенсивно колебалась (с малой амплитудой) под порывами ветра, причем, колебания были явно ассиметричны относительно «0», при этом все рули достаточно быстро уходят с нулевой позиции. Совершенно очевидно, что это проявление ошибки накопления! Управляемый полет длился не более 4 сек, вероятно это предел, не густо!
Так как проблема ошибки накопления при использовании только гироскопов неразрешима, то решил проверить вариант гиростабилизации с использованием собственных аппаратных средств самого чипа MPU6050. Найти достоверной информации о работе указанного узла микросхемы не удалось, известно лишь, что в нем осуществляется фильтрация, сбор и обработка сигналов от 3-х гироскопов и акселерометров, вывод готовых результатов. Обработанные данные выводятся по запросу по входу INT MPU6050, частота запроса 66Гц (измерил). Для подобных целей есть библиотека MPU6050 6Axis MotionApps20, однако в ней есть только вывод заумных данных типа кватернионов углов Эйлера и.т.п, но вывода элементарной угловой скорости гироскопов нет! Пришлось добавить MPU6050 Н, вывести угловую скорость для осуществления PD-регулирования. При этом оказалось, что можно легко создать «черный ящик» соединив с Arduino и картридж mikroSD по SPI. В данном случае однозначно по осям XY задействованы акселерометры, возникают сомнения, но это фирменное решение, квадракоптеры и самолеты летают, и их не косит!
Есть и проблемы с осью Z, так как дополнительно необходимо использовать компас, но это уже терпимая проблема! Короче, проведу испытание именно этого варианта управления!
Брат-2> Старт, к сожалению, вышел не совсем удачный, и тем не менее, .....
Результат работы MPU6050, доработанной библиотеки 6Axis MotionApps20 и внутреннем процессоре чипа. Соответственно голубая- ось X , коричневая- Y, зеленая-Z. Кривые записаны черным ящиком, блок перемещал на столе руками, не красиво, лучше не умею! Запись до ограничения ±20˚, естественно до подмешивания к осям X - Y оси Z . На графике видно, что с осями X – Y все терпимо, а вот Z не становится на «0»! Планирую после установки на исходную всех осей (около 20сек), немного провернуть ракету до установки всех рулей в положение «0», или вообще ничего не делать, после старта ракета сама найдет свое стабильное положение по крену. Немного уменьшил ответную реакцию осей, уж шибко быстро блок махал рулями! Однако, я не обольщаюсь, результат при испытании с большой долей вероятности может быть отрицательным, но:
О сколько нам открытий чудных
Готовят просвещенья дух
И Опыт, [сын] ошибок трудных,
И Гений, [парадоксов] друг,
[И Случай, бог изобретатель]
Как известно, отрицательный, тоже результат!
Результат работы MPU6050, доработанной библиотеки 6Axis MotionApps20 и внутреннем процессоре чипа. Соответственно голубая- ось X , коричневая- Y, зеленая-Z. Кривые записаны черным ящиком, блок перемещал на столе руками, не красиво, лучше не умею!
Запись до ограничения ±20˚, естественно до подмешивания к осям X - Y оси Z . На графике видно, что с осями X – Y все терпимо, а вот Z не становится на «0»! Планирую после установки на исходную всех осей (около 20сек), немного провернуть ракету до установки всех рулей в положение «0», или вообще ничего не делать, после старта ракета сама найдет свое стабильное положение по крену. Немного уменьшил ответную реакцию осей, уж шибко быстро блок махал рулями! Однако, я не обольщаюсь, результат при испытании с большой долей вероятности может быть отрицательным, но: О сколько нам открытий чудных
Готовят просвещенья дух
И Опыт, [сын] ошибок трудных,
И Гений, [парадоксов] друг,
[И Случай, бог изобретатель]
Как известно, отрицательный, тоже результат!
Прикреплённые файлы:
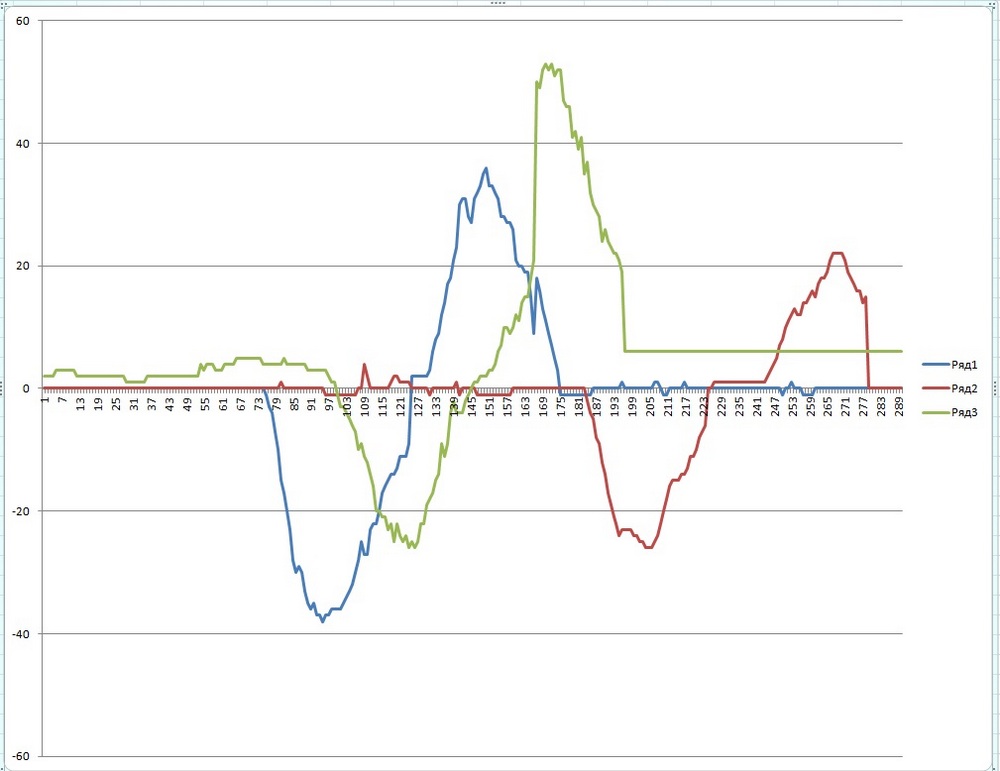
Брат-2> а вот Z не становится на «0»!
У тебя по Z был зашкал - цифровое ограничение. Поэтому интеграл перестал соответствовать повороту ракеты и не вернулся в ноль.
Брат-2> Как известно, отрицательный, тоже результат!
Ну, успехов в дальнейшем!
У тебя по Z был зашкал - цифровое ограничение. Поэтому интеграл перестал соответствовать повороту ракеты и не вернулся в ноль.
Брат-2> Как известно, отрицательный, тоже результат!
Ну, успехов в дальнейшем!

Брат-2> есть только вывод заумных данных типа кватернионов
Прошу прошения за наивный вопрос. Управление вертикалью вращающейся ракеты-это события происходящие в не инерциальной системе отсчета. А управлять стараемся с помощью инерциальной неподвижной системы отсчета трех осей. В чем тут соль?
Прошу прошения за наивный вопрос. Управление вертикалью вращающейся ракеты-это события происходящие в не инерциальной системе отсчета. А управлять стараемся с помощью инерциальной неподвижной системы отсчета трех осей. В чем тут соль?

Брат-2>> есть только вывод заумных данных типа кватернионов
EG54> Прошу прошения за наивный вопрос. Управление вертикалью вращающейся ракеты-это события происходящие в не инерциальной системе отсчета. А управлять стараемся с помощью инерциальной неподвижной системы отсчета трех осей. В чем тут соль?
Какое вращение имеется в виду? Если вращение ракеты вокруг собственной продольной оси, то его тоже можно погасить. Если имеется в виду вращение системы координат, связанной с Землёй, со скоростью 15 градусов в час, то его ещё заметить нужно!
EG54> Прошу прошения за наивный вопрос. Управление вертикалью вращающейся ракеты-это события происходящие в не инерциальной системе отсчета. А управлять стараемся с помощью инерциальной неподвижной системы отсчета трех осей. В чем тут соль?
Какое вращение имеется в виду? Если вращение ракеты вокруг собственной продольной оси, то его тоже можно погасить. Если имеется в виду вращение системы координат, связанной с Землёй, со скоростью 15 градусов в час, то его ещё заметить нужно!

Вот нарыл на "Алиэкспрессе" одно-осевой аналоговый гироскоп GY-35-MB с чипом ENC-03MB.
Получится ли с его помощью поймать отклонение от вертикали?

Получится ли с его помощью поймать отклонение от вертикали?
GY 35 MB одной оси гироскоп Аналоговый Модуль гироскоп ENC 03MB модуль купить на AliExpress
Купить товар GY 35 MB одной оси гироскоп Аналоговый Модуль гироскоп ENC 03MB модуль в категории на AliExpress. GY-35-MB одной оси гироскоп Аналоговый Модуль гироскоп ENC-03MB модуль // ru.aliexpress.com
mihail66> Вот нарыл на "Алиэкспрессе" одно-осевой аналоговый гироскоп GY-35-MB с чипом ENC-03MB.
mihail66> Получится ли с его помощью поймать отклонение от вертикали?
Вот представь:
Ты катаешься на карусели.
И держишь ракету горизонтально носом вперёд.
И тогда гироскоп покажет, что ракета поворачивает.
И интегратор покажет, что угол постоянно растёт.
Теперь всё тоже, но ты ещё вращаешь ракету вокруг её оси.
Когда она повёрнута на 90, гироскоп перестаёт чувствовать вращение, потому что это будет уже не его компонента.
Когда на 180, он будет чувствовать вращение, но в обратную сторону.
Когда на 270, опять не чувствует.
Интегратор наинтегритует синусоиду, которая в среднем около нуля.
Что не соответствует реальности.
Вот и получается, что нужно делать полноценные мозги с 3-осевым гироскопом.
Без микроконтроллера, чисто аналогово, это чудовищно сложная задача.
mihail66> Получится ли с его помощью поймать отклонение от вертикали?
Вот представь:
Ты катаешься на карусели.
И держишь ракету горизонтально носом вперёд.
И тогда гироскоп покажет, что ракета поворачивает.
И интегратор покажет, что угол постоянно растёт.
Теперь всё тоже, но ты ещё вращаешь ракету вокруг её оси.
Когда она повёрнута на 90, гироскоп перестаёт чувствовать вращение, потому что это будет уже не его компонента.
Когда на 180, он будет чувствовать вращение, но в обратную сторону.
Когда на 270, опять не чувствует.
Интегратор наинтегритует синусоиду, которая в среднем около нуля.
Что не соответствует реальности.
Вот и получается, что нужно делать полноценные мозги с 3-осевым гироскопом.
Без микроконтроллера, чисто аналогово, это чудовищно сложная задача.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
