-
![[image]](https://www.balancer.ru/cache/forums/attaches/2014/06/128x128-crop/03-3498228-1.jpg)
Стенд и оборудование для испытаний и измерений VIII
Теги:
 Skyangel
Skyangel

pinko> По какой-то причине електроника не зафиксировала калибровочны коэффициент, ....
Привет Pinko")
У меня тоже такой график получился ) Но он записан в 3-ю ячейку, а General писал, что запись во вторую была...
Привет Pinko
У меня тоже такой график получился ) Но он записан в 3-ю ячейку, а General писал, что запись во вторую была...


 инфо
инфо инструменты
инструменты Gеnеral
Gеnеral
Gеnеral> масса топлива 580гр + 30гр трассер
А коэффициент какой? График в сообщении Pinko похож?
А коэффициент какой? График в сообщении Pinko похож?

Gеnеral
втянувшийся
Skyangel> У меня тоже такой график получился ) Но он записан в 3-ю ячейку, а General писал, что запись во вторую была...
Прошу прощения, была ошибка в тексте, запись теста пошла как раз в третью ячейку
Прошу прощения, была ошибка в тексте, запись теста пошла как раз в третью ячейку

Gеnеral> Прошу прощения, была ошибка в тексте, запись теста пошла как раз в третью ячейку
ОК.. УИ=128 всего при такой массе топлива...
ОК.. УИ=128 всего при такой массе топлива...
Gеnеral
втянувшийся
Gеnеral>> Прошу прощения, была ошибка в тексте, запись теста пошла как раз в третью ячейку
Skyangel> ОК.. УИ=128 всего при такой массе топлива...
Что то не вяжется, у двигателя РД-4 N3 на три шашки и с массой топлива 345гр уи показал около 190 при том что Kn max 206, а у РД-4 N5 масса топлива 580гр и Kn max-312
В любом случае буду делать пере калибровку стенда и новую серию тестов и начну заниматься планиром ракеты
Skyangel> ОК.. УИ=128 всего при такой массе топлива...
Что то не вяжется, у двигателя РД-4 N3 на три шашки и с массой топлива 345гр уи показал около 190 при том что Kn max 206, а у РД-4 N5 масса топлива 580гр и Kn max-312
В любом случае буду делать пере калибровку стенда и новую серию тестов и начну заниматься планиром ракеты
Gеnеral> Что то не вяжется..
В файле была ошибка. Исправил.
В файле была ошибка. Исправил.
Прикреплённые файлы:
РД-4 N5 2.txt (скачать)
[135 кБ]
Это сообщение редактировалось 08.12.2016 в 21:55
pinko> ... вот резултат тяги и ее спектральный анализ.
А что за версия программы?") У меня закладки FFT нет ..
У меня закладки FFT нет ..
А что за версия программы?
У меня закладки FFT нет ..
 Massaraksh
Massaraksh

Доработал электронную схему стенда. Добавил микросхему 25LC512 - статическая память 64 кбайт, с интерфейсом по SPI-протоколу. Буду писать данные в неё, вместо EEPROM процессора - таким образом можно испытывать много двигателей за один раз. Кстати, аппаратный SPI с ней не пошёл почему-то, а вот программный - практически сразу. В связи с тем, что неохота переделывать основную плату, сделал её отдельной платой.
Прикреплённые файлы:
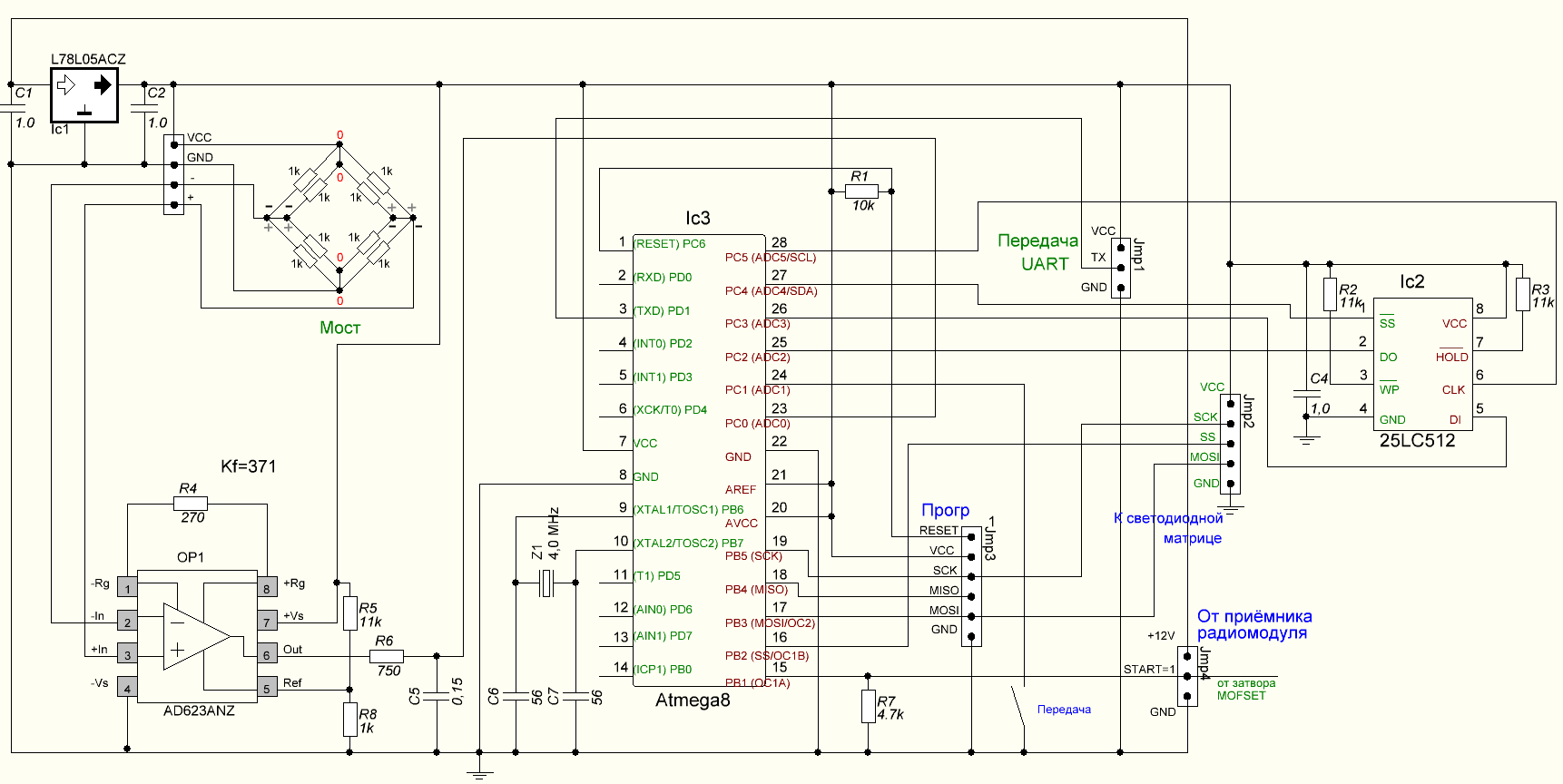





Massaraksh> Доработал электронную схему стенда. Добавил микросхему 25LC512 -
Добрый день.
Хорошо получилось!
Скажи пож. почему не СД карту? По сложности тоже самое, ну, а удобство очевидно.
С уважением irfps.
Добрый день.
Хорошо получилось!
Скажи пож. почему не СД карту? По сложности тоже самое, ну, а удобство очевидно.
С уважением irfps.


irfps> Скажи пож. почему не СД карту? По сложности тоже самое, ну, а удобство очевидно.
Сначала я попробовал с SD-картой, но не пошло. Программирую всё верно, но не идёт. Скорее всего, там дело в хреновой пайке и в недостаточном (по мощности) питании 3.3v
Заказал вот такую штуку,

как получу, буду заниматься SD-картами.
Сначала я попробовал с SD-картой, но не пошло. Программирую всё верно, но не идёт. Скорее всего, там дело в хреновой пайке и в недостаточном (по мощности) питании 3.3v
Заказал вот такую штуку,
Карта Micro Sd мини TF card reader модуль SPI интерфейсы с чип преобразователь уровня для arduino купить на AliExpress
Купить товар Карта Micro Sd мини TF card reader модуль SPI интерфейсы с чип преобразователь уровня для arduino в категории Интегральные схемы на AliExpress. модуль (MicroSD Card Адаптер) является Микро SD card reader модуль, через файловой системы и SPI интерфейс драйвер // ru.aliexpress.comкак получу, буду заниматься SD-картами.
 Xan
Xan

Хотя ни одного двигателя ещё не сделал, но решил, что пора уже делать следующий стенд!
Так как в планах управление вектором тяги, то хочется мерить, насколько эта тяга искривляется в сторону.
Сначала думал на основной датчик (Z) ставить шарнирно двигатель (задним концом), а около сопла удерживать его двумя другими датчиками (X и Y).
Ну и мерить силы перпендикулярные оси.
Но в результате поиска подходящих датчиков стало жалко деньги. И решил сэкономить — купить напольные весы.
Которые, почему-то, дешевле, чем самые дешёвые датчики для них.
Решил каждому из 4 датчиков в весах добавить половинку моста (до полного), и мерить отдельно сразу 4 сигнала.
(4-канальных АЦП у меня навалом.)
Сумма всех — это Z, попарные разности — X и Y.
В случае бабаха — нифига не жалко, китайские весы всего 12 баксов стоят. И их везде полно.
Кстати, китайские весы сразу из коробки обвешивают на 5 процентов. И это никакими настройками не поправить, потому что нет никаких настроек.
Вот уроды.
Так как в планах управление вектором тяги, то хочется мерить, насколько эта тяга искривляется в сторону.
Сначала думал на основной датчик (Z) ставить шарнирно двигатель (задним концом), а около сопла удерживать его двумя другими датчиками (X и Y).
Ну и мерить силы перпендикулярные оси.
Но в результате поиска подходящих датчиков стало жалко деньги. И решил сэкономить — купить напольные весы.
Которые, почему-то, дешевле, чем самые дешёвые датчики для них.
Решил каждому из 4 датчиков в весах добавить половинку моста (до полного), и мерить отдельно сразу 4 сигнала.
(4-канальных АЦП у меня навалом.
)Сумма всех — это Z, попарные разности — X и Y.
В случае бабаха — нифига не жалко, китайские весы всего 12 баксов стоят. И их везде полно.
Кстати, китайские весы сразу из коробки обвешивают на 5 процентов. И это никакими настройками не поправить, потому что нет никаких настроек.
Вот уроды.
Xan> Но в результате поиска подходящих датчиков стало жалко деньги. И решил сэкономить — купить напольные весы.
Xan> Которые, почему-то, дешевле, чем самые дешёвые датчики для них.
Xan> китайские весы всего 12 баксов стоят.
А датчики - 4 бакса.

Xan> Которые, почему-то, дешевле, чем самые дешёвые датчики для них.
Xan> китайские весы всего 12 баксов стоят.
А датчики - 4 бакса.
БЕСПЛАТНАЯ ДОСТАВКА 4 шт./лот Эксперименты тела масштаб оптовая человеческий масштаб тензодатчика датчик сопротивление нагрузки 50 кг полумостовой датчики купить на AliExpress
Купить товар БЕСПЛАТНАЯ ДОСТАВКА 4 шт./лот Эксперименты тела масштаб оптовая человеческий масштаб тензодатчика датчик сопротивление нагрузки 50 кг полумостовой датчики в категории Датчики на AliExpress. при измерении, правильное усилие наносится на внешнюю сторону штамм E-образный луч часть датчика (т. е., тензометрическ // ru.aliexpress.com
Massaraksh> А датчики - 4 бакса.
Не нашёл настолько дешёвых.
Или, скорее, побоялся "эксперименты тела".
Но в целых весах ещё и вся механика.
Которую делать руками очень не хочется.
Не нашёл настолько дешёвых.
Или, скорее, побоялся "эксперименты тела".
Но в целых весах ещё и вся механика.
Которую делать руками очень не хочется.
Это сообщение редактировалось 21.12.2016 в 21:35
Xan> Но в целых весах ещё и вся механика.
Xan> Которую делать руками очень не хочется.
Если хочешь мерить боковые усилия, то всё равно переделывать придётся.
Xan> Которую делать руками очень не хочется.
Если хочешь мерить боковые усилия, то всё равно переделывать придётся.

Xan> В случае бабаха — нифига не жалко, китайские весы всего 12 баксов стоят. И их везде полно.
Пока самые лучшие датчики измерения усилий из всех, с какими я работал. Самые малоинерционные и живучие.
Пока самые лучшие датчики измерения усилий из всех, с какими я работал. Самые малоинерционные и живучие.

 Lioxa
Lioxa

Lioxa
втянувшийся
Буквально на днях седелал стенд на hx711 (2$), схема банальна , программа 5 строчек. С датчиком на 30кг весы видят вес в 1-2гр. Скорость измерения 80 измерений в секунду. Может я конечно не знаю чего-то, но мне кажется что долхжно работать.
Lioxa> Буквально на днях сделал стенд на hx711 (2$)
А я уже несколько лет говорю, что не надо городить всяческие инструментальные усилители, когда есть специальные микрухи для тензодатчиков.
А я уже несколько лет говорю, что не надо городить всяческие инструментальные усилители, когда есть специальные микрухи для тензодатчиков.

otis68
новичок
добрый день . Прочитал о событии с ЛИН Индастри и просто захотелось по пробовать. опыт с железом есть .Сколько и каких параметром нужно писать. Могу сделать это на ардуино а можно и на железе от овен. Как я понял нужно мерить усилии двигателя,температуру, давление и расход компонентов топлива,время работы,и как говорит Хан измеряем и боковые усилия. Итог если я правильно посчитал 12-15 параметром. Запись на SD и трансляция на комп и ли внешний пульт управления. Если что то пропустил подскажите.
otis68
новичок
СергейZ> товарищи, посоветуйте чем залить манометр и U-образное подводящее колено к нему (от камеры сгорания), какой жидкостью?
СергейZ> глицерин, думаю не подходит, трансформаторное масло - боюсь, оно же горит...
Трансформаторые масла опасны. При возгорание выделяют фозген. Это из ТБ на электроподстанциях.
СергейZ> глицерин, думаю не подходит, трансформаторное масло - боюсь, оно же горит...
Трансформаторые масла опасны. При возгорание выделяют фозген. Это из ТБ на электроподстанциях.
otis68> Итог если я правильно посчитал 12-15 параметром.
А цель какая?
А цель какая?
otis68
новичок
otis68>> Итог если я правильно посчитал 12-15 параметром.
Massaraksh> А цель какая?
Просто по пробовать. Больно интересная задачка. Выйдет можно будет и за маленькую денежку продавать всем желающим.Под это дело заказал MKRZero. Питание 3.3 V;32bit;48MGz;ARM Core; DS cart.
Massaraksh> А цель какая?
Просто по пробовать. Больно интересная задачка. Выйдет можно будет и за маленькую денежку продавать всем желающим.Под это дело заказал MKRZero. Питание 3.3 V;32bit;48MGz;ARM Core; DS cart.

Normol
новичок
Xan> Хотя ни одного двигателя ещё не сделал, но решил, что пора уже делать следующий стенд!
Доброго дня. Ну а старый стенд у Вас можно купить?
Доброго дня. Ну а старый стенд у Вас можно купить?


Normol> Доброго дня. Ну а старый стенд у Вас можно купить?
Датчик не мой, взят в конторе. Для работы, в том числе.
Но датчики везде продаются.
Железяка-основание — почта дороже возьмёт, чем она стоит.
А электронику с софтом — да:
AD7730BRUZ — $16.01;
PIC16F877A-I/ML — $6.03;
FT232RQ — $3.96;
Остальные компоненты — даром;
Итого: $26.00
Ну и доставка.
Датчик не мой, взят в конторе. Для работы, в том числе.
Но датчики везде продаются.
Железяка-основание — почта дороже возьмёт, чем она стоит.
А электронику с софтом — да:
AD7730BRUZ — $16.01;
PIC16F877A-I/ML — $6.03;
FT232RQ — $3.96;
Остальные компоненты — даром;
Итого: $26.00
Ну и доставка.
Copyright © Balancer 1997..2022
Создано 17.07.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 17.07.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
