-
![[image]](https://www.balancer.ru/cache/sites/ru/fa/fandom/about_fan/stamps/128x128-crop/yemen_ar_1969_fiction_mi_block_103_ill_2.jpg)
Проекты орбитальных станций с искусственной тяжестью
более реалистичные, чем фонбрауновские "колёса"Теги:
 Zenitchik
Zenitchik

Alek> Предпологается построить за 5 лет и 3,7 млрд. долл.
Да они там оптимисты. ЦиХ подобное, но без "колеса" оценивал в порядка $3e+11 )))
Да они там оптимисты. ЦиХ подобное, но без "колеса" оценивал в порядка $3e+11 )))


 инфо
инфо инструменты
инструменты Fakir
Fakir

.
Прикреплённые файлы:


 Fakir
Fakir
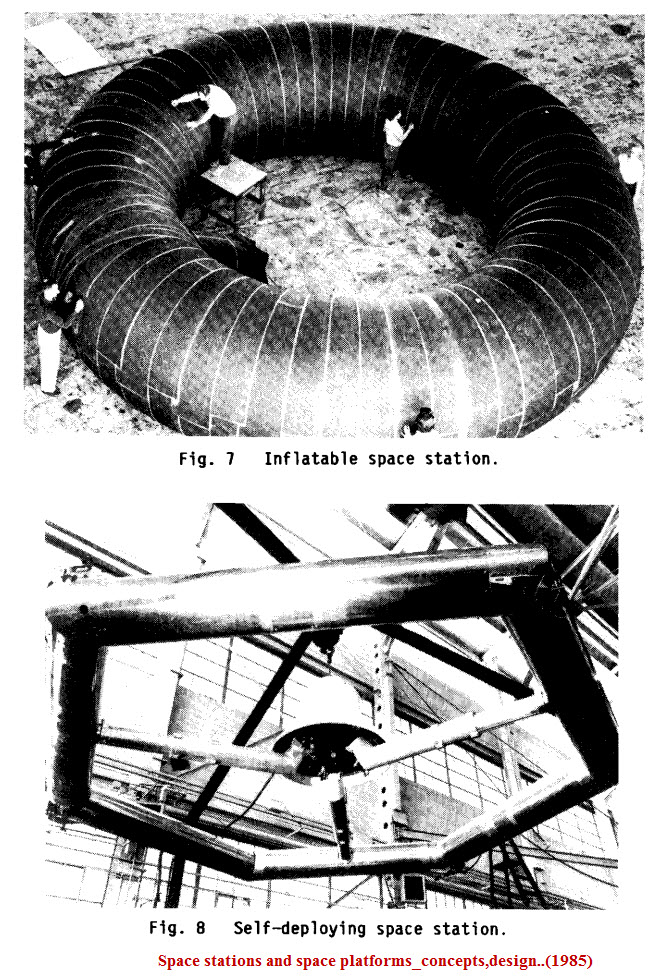
Варианты из 60-х.
Надувной Гудьировский здесь уже мелькал, но по-прежнему представляет интерес.
Вообще досадно, что надувные модули пока так и остались малоиспытанными, облётаны только маленькие варианты от Бигелоу.
Для некоторых достаточно амбициозных задач это пока, пожалуй, единственный вариант.
Надувной Гудьировский здесь уже мелькал, но по-прежнему представляет интерес.
Вообще досадно, что надувные модули пока так и остались малоиспытанными, облётаны только маленькие варианты от Бигелоу.
Для некоторых достаточно амбициозных задач это пока, пожалуй, единственный вариант.
Прикреплённые файлы:
Для некоторых достаточно амбициозных задач это пока, пожалуй, единственный вариант.
Возможно, искусственная тяжесть - одна из них. По крайней мере - в варианте классического колёса. Хотя у него куча недостатков.
Квадратная рама, в к-й обитаемые отсеки расположены параллельно оси вращения, по-своему лучше, но тоже с трудностями:
1. Желательно иметь как можно бОльшие радиусы вращения, чтобы для получения заданной величины квазитяжести не нужны были слишком большие угловые скорости (=> кориолис и вообще в глазах рябит).
2. Желательно, чтобы обитаемые отсеки имели единый гермообъём, т.е. все могли сообщаться непосредственно (неважно, что разделены на отсеки с люками между ними, но сообщение возможно, не выходя в открытый космос).
3. Стыковки с кораблями.
При больших радиусах это сложно - нужны длинные модули-"шахты" от "модули с тяжестью" до оси и до противоположного "отсека с тяжестью". И для приёма кораблей либо нужен модуль на оси вращения, либо надо станцию останавливать на время приёма-старта.
Вариант решения: в "раме" типа классической:
Обитаемым является только ОДИН из продольных модулей - ОС системы "каноэ".
Собственно, обитаемый модуль может состоять и не из одного, а из нескольких линейно состыкованных модулей стандартной размерности ("Салют", "Заря" и т.п.). Можно и не только линейно, но это менее рационально.
Противовес - негерметичный.
Крепятся к ферменной несущей конструкции.
Таким образом можно отказаться от радиальных соединительных гермомодулей. Корабли причаливают к оси на стыковочный узел, не имеющий люков, а потом переносятся манипулятором на стандартные стыкузлы с люками на обитаемом модуле.
Стыковочный узел на оси вращения может быть вращающимся - в этом случае можно будет осуществлять стыковку, не останавливая вращения станции как целого. Затея сложноватая и выглядет рискованной, но может быть и осуществима. И может быть даже не так сложно и рискованно, как кажется. В конце концов, положение оси вращения стабильно и хорошо известно (тут ничуть не хуже, чем на обычной ОС), а вращать электромотором стыкузел можно, соблюдая весьма высокую точность не то что угловой скорости, но и даже и отслеживая угловые ускорения и угловые положения. Для управления приводами лифтов и т.п. сейчас и не такое делают. После завершения стыковки узел "тормозится" относительно всей станции, корабль переносится манипулятором. Манипулятор будет нужен несколько отличный от того, что используется на МКС - переносить придётся значительно дальше, и "основание" манипулятора должно ездить на тележке вдоль радиальной фермы. Задача, вероятно, решаемая, хотя наверняка будут свои трудности (чисто даже технические в конструкции тележки, помимо кориолисовых сил и/или необходимости иметь "противовес" или "дораскручивать" станцию по мере смещения корабля по радиусы, или мириться с изменениями угловой скорости). Зато сам манипулятор может быть значительно короче.
(вариант с зависанием КК без стыковки, и подхвате манипулятором - тоже представим, но за счёт вращения может оказаться даже сложнее, чем прямая первичная стыковка. Хотя может и нет, зависит от многих параметров. Конечно, можно и сам корабль закручивать вокруг продольной оси перед стыковкой, но на первый взгляд это выглядит менее удачным решением. Хотя может быть и нет - зависит от)
НотаБене: чем меньше угловая скорость вращения станции, тем менее проблемна стыковка. Т.е. увеличивая радиус вращения, выигрываем дважды.
Теперь о проблемах.
Противовес должен быть достаточно массивным, если действовать влоб, по классической схеме - его масса равна массе обитаемого модуля. Это сложно. Сложно в том смысле, что не очень понятно - чем можно на ОС нагрузить такой НЕобитаемый модуль.
Научное оборудование теряет большинство преимуществ расположения на ОС, фактически это ближе к свободнолетающему спутнику. Можно, конечно, но неизящно. Вроде рукой подать - а нормально обслуживать нельзя. Близок локоть...
Сугубо служебными системами загрузить тоже затруднительно. Не наберётся столько - это раз. СЖО туда вешать - понадобятся длинные трубные коммуникации. Наверное, это решаемо, но неприятно. И вообще надёжность падает, когда бочка с людьми в одном месте, а СЖО за сто метров. Энергомодуль можно повесить спокойно, но там массы немного. И т.п.
Естественно, напрашивается решение: "каноэ" должно быть асимметричным, противовес в разы легче обитаемого (и вообще основного) модуля, и отстоит дальше от оси вращения.
НотаБени: конкретное положение оси вращения на ферме между обитаемым модулем и противовесом теперь не является жёстко заданным. Собственно, никакой материальной оси мы там не имеем - ось вращения зависит от соотношения масс обитаемого модуля и противовеса, оно со временем может слегка изменяться. Но это нам вообще неважно - технически на оси должен располагаться только "первый" стыковочный узел (и маршевые двигатели коррекции орбиты, может еще гиродины), а этот модуль вполне может быть смонтирован также на тележке и при необходимость смещаться вдоль радиальной фермы к текущему положению оси вращения. Точность позиционирования - проблема техническая, но не принципиальная. Гиродины даже скорее лучше отдельным подвижным модулем.
Собственно, теперь очевидно, что и ферменная рама может отличаться от классического варианта, где она прямоугольная. Она может быть и просто линейной. Единой конструкцией, или, например, для большей жёсткости состоять из двух (или более) близко расположенных ферм - не так важно.
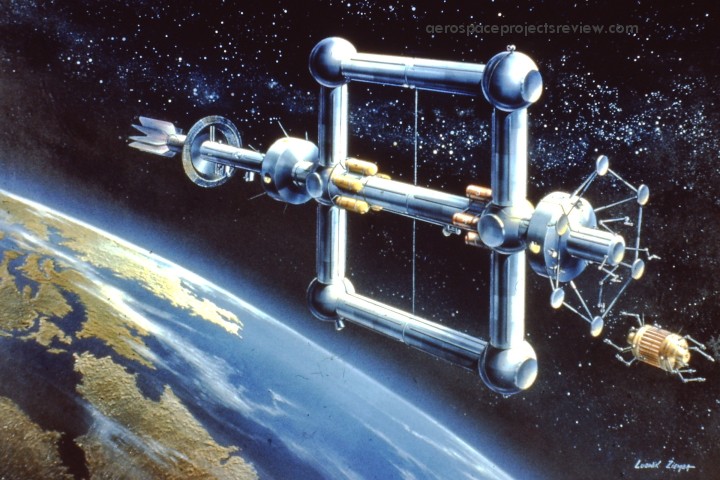
Мы, совершив круг, вернулись к вариации на тему другой классической концепции - "гантели" с длинной ручкой, наподобие проекта Груммана и многих других. Однако есть и отличия: отказались от гермотоннелей до оси вращения, сохранив возможность стыковки без остановки вращения. Кроме того, обитаемый модуль получился одноуровневой "анфиладой", а не многоэтажной "башней", но кориолисовы эффекты по-прежнему малы.
Одна из сложностей - обеспечение устойчивости вращения. Т.е. чтобы эта ось не оказалась промежуточной у эллипсоида инерции станции, придётся принимать специальные меры по распределению масс, м.б. дополнительные противовесы.
Дополнительная сложность2: несколько труднее будет отслеживать солнечными панелями солнце. Конечно, реактор на подобного рода станцию как бы и напрашивается (и так и так нужна длинная ферма - убиваем двух зайцев сразу), но это слишком смело, два нововведения разом.
Вся эта штука наверняка будет немного прецессировать, но это не очень большая проблема, если только станция не заточена под наблюдение за Землёй - а делать это бессмысленно. Астрономические модули придётся вешать вблизи оси вращения, если вообще этим заниматься. Хотя лучше уж свободнолетающие в составе небольшого орбитального созвездия. Эксперименты с микрогравитацией, естественно, тоже отменяются либо переводятся на свободнолетающие модули. Впрочем, об этом давно мечтали даже без вращения.
Дополнительная сложность3: коррекция орбиты (если не останавливать вращение) возможна не в любой произвольный момент, а только когда ось вращения совпадает с касательной к орбите или близка к ней (ну можно и иначе, но сложнее, больше расход топлива и/или нужно действовать последовательными короткими импульсами тяги). Тоже некритично. Процедура это обычно плановая. Даже при манёврах уклонения обычно есть по нескольку суток, если не недель. Можно подстроиться.
Возможно, искусственная тяжесть - одна из них. По крайней мере - в варианте классического колёса. Хотя у него куча недостатков.
Квадратная рама, в к-й обитаемые отсеки расположены параллельно оси вращения, по-своему лучше, но тоже с трудностями:
1. Желательно иметь как можно бОльшие радиусы вращения, чтобы для получения заданной величины квазитяжести не нужны были слишком большие угловые скорости (=> кориолис и вообще в глазах рябит).
2. Желательно, чтобы обитаемые отсеки имели единый гермообъём, т.е. все могли сообщаться непосредственно (неважно, что разделены на отсеки с люками между ними, но сообщение возможно, не выходя в открытый космос).
3. Стыковки с кораблями.
При больших радиусах это сложно - нужны длинные модули-"шахты" от "модули с тяжестью" до оси и до противоположного "отсека с тяжестью". И для приёма кораблей либо нужен модуль на оси вращения, либо надо станцию останавливать на время приёма-старта.
Вариант решения: в "раме" типа классической:

Обитаемым является только ОДИН из продольных модулей - ОС системы "каноэ".
Собственно, обитаемый модуль может состоять и не из одного, а из нескольких линейно состыкованных модулей стандартной размерности ("Салют", "Заря" и т.п.). Можно и не только линейно, но это менее рационально.
Противовес - негерметичный.
Крепятся к ферменной несущей конструкции.
Таким образом можно отказаться от радиальных соединительных гермомодулей. Корабли причаливают к оси на стыковочный узел, не имеющий люков, а потом переносятся манипулятором на стандартные стыкузлы с люками на обитаемом модуле.
Стыковочный узел на оси вращения может быть вращающимся - в этом случае можно будет осуществлять стыковку, не останавливая вращения станции как целого. Затея сложноватая и выглядет рискованной, но может быть и осуществима. И может быть даже не так сложно и рискованно, как кажется. В конце концов, положение оси вращения стабильно и хорошо известно (тут ничуть не хуже, чем на обычной ОС), а вращать электромотором стыкузел можно, соблюдая весьма высокую точность не то что угловой скорости, но и даже и отслеживая угловые ускорения и угловые положения. Для управления приводами лифтов и т.п. сейчас и не такое делают. После завершения стыковки узел "тормозится" относительно всей станции, корабль переносится манипулятором. Манипулятор будет нужен несколько отличный от того, что используется на МКС - переносить придётся значительно дальше, и "основание" манипулятора должно ездить на тележке вдоль радиальной фермы. Задача, вероятно, решаемая, хотя наверняка будут свои трудности (чисто даже технические в конструкции тележки, помимо кориолисовых сил и/или необходимости иметь "противовес" или "дораскручивать" станцию по мере смещения корабля по радиусы, или мириться с изменениями угловой скорости). Зато сам манипулятор может быть значительно короче.
(вариант с зависанием КК без стыковки, и подхвате манипулятором - тоже представим, но за счёт вращения может оказаться даже сложнее, чем прямая первичная стыковка. Хотя может и нет, зависит от многих параметров. Конечно, можно и сам корабль закручивать вокруг продольной оси перед стыковкой, но на первый взгляд это выглядит менее удачным решением. Хотя может быть и нет - зависит от)
НотаБене: чем меньше угловая скорость вращения станции, тем менее проблемна стыковка. Т.е. увеличивая радиус вращения, выигрываем дважды.
Теперь о проблемах.
Противовес должен быть достаточно массивным, если действовать влоб, по классической схеме - его масса равна массе обитаемого модуля. Это сложно. Сложно в том смысле, что не очень понятно - чем можно на ОС нагрузить такой НЕобитаемый модуль.
Научное оборудование теряет большинство преимуществ расположения на ОС, фактически это ближе к свободнолетающему спутнику. Можно, конечно, но неизящно. Вроде рукой подать - а нормально обслуживать нельзя. Близок локоть...
Сугубо служебными системами загрузить тоже затруднительно. Не наберётся столько - это раз. СЖО туда вешать - понадобятся длинные трубные коммуникации. Наверное, это решаемо, но неприятно. И вообще надёжность падает, когда бочка с людьми в одном месте, а СЖО за сто метров. Энергомодуль можно повесить спокойно, но там массы немного. И т.п.
Естественно, напрашивается решение: "каноэ" должно быть асимметричным, противовес в разы легче обитаемого (и вообще основного) модуля, и отстоит дальше от оси вращения.
НотаБени: конкретное положение оси вращения на ферме между обитаемым модулем и противовесом теперь не является жёстко заданным. Собственно, никакой материальной оси мы там не имеем - ось вращения зависит от соотношения масс обитаемого модуля и противовеса, оно со временем может слегка изменяться. Но это нам вообще неважно - технически на оси должен располагаться только "первый" стыковочный узел (и маршевые двигатели коррекции орбиты, может еще гиродины), а этот модуль вполне может быть смонтирован также на тележке и при необходимость смещаться вдоль радиальной фермы к текущему положению оси вращения. Точность позиционирования - проблема техническая, но не принципиальная. Гиродины даже скорее лучше отдельным подвижным модулем.
Собственно, теперь очевидно, что и ферменная рама может отличаться от классического варианта, где она прямоугольная. Она может быть и просто линейной. Единой конструкцией, или, например, для большей жёсткости состоять из двух (или более) близко расположенных ферм - не так важно.
Мы, совершив круг, вернулись к вариации на тему другой классической концепции - "гантели" с длинной ручкой, наподобие проекта Груммана и многих других. Однако есть и отличия: отказались от гермотоннелей до оси вращения, сохранив возможность стыковки без остановки вращения. Кроме того, обитаемый модуль получился одноуровневой "анфиладой", а не многоэтажной "башней", но кориолисовы эффекты по-прежнему малы.
Одна из сложностей - обеспечение устойчивости вращения. Т.е. чтобы эта ось не оказалась промежуточной у эллипсоида инерции станции, придётся принимать специальные меры по распределению масс, м.б. дополнительные противовесы.
Дополнительная сложность2: несколько труднее будет отслеживать солнечными панелями солнце. Конечно, реактор на подобного рода станцию как бы и напрашивается (и так и так нужна длинная ферма - убиваем двух зайцев сразу), но это слишком смело, два нововведения разом.
Вся эта штука наверняка будет немного прецессировать, но это не очень большая проблема, если только станция не заточена под наблюдение за Землёй - а делать это бессмысленно. Астрономические модули придётся вешать вблизи оси вращения, если вообще этим заниматься. Хотя лучше уж свободнолетающие в составе небольшого орбитального созвездия. Эксперименты с микрогравитацией, естественно, тоже отменяются либо переводятся на свободнолетающие модули. Впрочем, об этом давно мечтали даже без вращения.
Дополнительная сложность3: коррекция орбиты (если не останавливать вращение) возможна не в любой произвольный момент, а только когда ось вращения совпадает с касательной к орбите или близка к ней (ну можно и иначе, но сложнее, больше расход топлива и/или нужно действовать последовательными короткими импульсами тяги). Тоже некритично. Процедура это обычно плановая. Даже при манёврах уклонения обычно есть по нескольку суток, если не недель. Можно подстроиться.

Fakir> Вообще досадно, что надувные модули пока так и остались малоиспытанными, облётаны только маленькие варианты от Бигелоу.
Fakir> Для некоторых достаточно амбициозных задач это пока, пожалуй, единственный вариант.
Надувные получаются примерно вдвое тяжелее на м2 оболочки, в центре нужна дополнительная жёсткая конструкция, сложно стыковать секции, точнее конфигурация стенки рядом со стыком.
Fakir> Стыковочный узел на оси вращения может быть вращающимся
И вращающийся - может быть и не на оси. Ибо какая разница что вращать - узел "вперёд" или узел "вбок"?
Fakir> вариант с зависанием КК без стыковки, и подхвате манипулятором
Манипулятор можно тоже вращать, чтобы был неподвижен.
Fakir> Вроде рукой подать - а нормально обслуживать нельзя.
Телеманипулятор...
Fakir> и ферменная рама может отличаться от классического варианта, где она прямоугольная.
Можно вообще трос...
Fakir> Для некоторых достаточно амбициозных задач это пока, пожалуй, единственный вариант.
Надувные получаются примерно вдвое тяжелее на м2 оболочки, в центре нужна дополнительная жёсткая конструкция, сложно стыковать секции, точнее конфигурация стенки рядом со стыком.
Fakir> Стыковочный узел на оси вращения может быть вращающимся
И вращающийся - может быть и не на оси. Ибо какая разница что вращать - узел "вперёд" или узел "вбок"?
Fakir> вариант с зависанием КК без стыковки, и подхвате манипулятором
Манипулятор можно тоже вращать, чтобы был неподвижен.
Fakir> Вроде рукой подать - а нормально обслуживать нельзя.
Телеманипулятор...
Fakir> и ферменная рама может отличаться от классического варианта, где она прямоугольная.
Можно вообще трос...

Дем> Надувные получаются примерно вдвое тяжелее на м2 оболочки,
Можно реализовать габариты конечного модуля, к-е не лезут под обтекатель в твёрдом виде.
Дем> И вращающийся - может быть и не на оси.
Не может, это совсем цирк получается. Ни одной проблемы не решает, новые создаёт.
Fakir>> вариант с зависанием КК без стыковки, и подхвате манипулятором
Дем> Манипулятор можно тоже вращать, чтобы был неподвижен.
Можно, но это уже не очень сильно отличается от вращения стыкузла. Скорее, главный вопрос будет в колебаниях такой системы, насколько сложнее всё окажется в случае вращения.
Fakir>> Вроде рукой подать - а нормально обслуживать нельзя.
Дем> Телеманипулятор...
Дем> Можно вообще трос...
С колебаниями замучаешься.
Можно реализовать габариты конечного модуля, к-е не лезут под обтекатель в твёрдом виде.
Дем> И вращающийся - может быть и не на оси.
Не может, это совсем цирк получается. Ни одной проблемы не решает, новые создаёт.
Fakir>> вариант с зависанием КК без стыковки, и подхвате манипулятором
Дем> Манипулятор можно тоже вращать, чтобы был неподвижен.
Можно, но это уже не очень сильно отличается от вращения стыкузла. Скорее, главный вопрос будет в колебаниях такой системы, насколько сложнее всё окажется в случае вращения.
Fakir>> Вроде рукой подать - а нормально обслуживать нельзя.
Дем> Телеманипулятор...
Дем> Можно вообще трос...
С колебаниями замучаешься.
Fakir> Можно реализовать габариты конечного модуля, к-е не лезут под обтекатель в твёрдом виде.
В перспективе появления старшипа - нужность сомнительна... а ведь невозвращаемый корабль и адкалиберным может быть, метров 15 в диаметре
Дем>> И вращающийся - может быть и не на оси.
Fakir> Не может, это совсем цирк получается. Ни одной проблемы не решает, новые создаёт.
Ну вот например делаем от оси ферму длиной как до модуля, стыкуемся к ней, раскручиваем - и у нас корабль прямо напротив входа висит.
В перспективе появления старшипа - нужность сомнительна... а ведь невозвращаемый корабль и адкалиберным может быть, метров 15 в диаметре
Дем>> И вращающийся - может быть и не на оси.
Fakir> Не может, это совсем цирк получается. Ни одной проблемы не решает, новые создаёт.
Ну вот например делаем от оси ферму длиной как до модуля, стыкуемся к ней, раскручиваем - и у нас корабль прямо напротив входа висит.
Дем> Ну вот например делаем от оси ферму длиной как до модуля, стыкуемся к ней, раскручиваем - и у нас корабль прямо напротив входа висит.
Тяжёлая, изгибные колебания и т.п.
Тяжёлая, изгибные колебания и т.п.


 Fakir
Fakir
Трепология, но пусть лежит для полноты картины.

Космическая станция с искусственной гравитацией с одного запуска - New-Science.ru
Устойчивое присутствие человека в космосе было главной целью НАСА на протяжении десятилетий, будь то // new-science.ru
Для полноты:
Лекция «Искусственная гравитация для людей в космосе: эволюция идей, технологий, проектов»
Научно-популярная лекция «Искусственная гравитация для людей в космосе: эволюция идей, технологий, проектов» Кричевского Сергея Владимировича, главного научного сотрудника ИИЕТ имени С.И. Вавилова РАН Одной из важных проблем освоения космоса и жизни вне Земли является проблема создания искусственной гравитации.
Смотреть не стал, основное есть в текстовом варианте -"Искусственная гравитация для людей в космосе" (по обеим ссылкам одна и та же статья, просто форматировано по-разному):

Пара занятных фото-схем есть, но, к соажлению, по самым интересным как раз без подробностей.
До кучи утверждает, что по современным представлениям только по соображениям отсутствия гравитации (без учёта радиационных проблем) в совокупности за всю жизнь человеку нельзя проводить в космосе больше 3 лет (при этом непрерывно, "за раз", не более 1,5-2 лет).
Что в известном смысле дополнительно осложняет перспективы марсианской экспедиции.
Впрочем, и так всем не до неё.
Научно-популярная лекция «Искусственная гравитация для людей в космосе: эволюция идей, технологий, проектов» Кричевского Сергея Владимировича, главного научного сотрудника ИИЕТ имени С.И. Вавилова РАН
Лекция «Искусственная гравитация для людей в космосе: эволюция идей, технологий, проектов»
Научно-популярная лекция «Искусственная гравитация для людей в космосе: эволюция идей, технологий, проектов» Кричевского Сергея Владимировича, главного научного сотрудника ИИЕТ имени С.И. Вавилова РАН Одной из важных проблем освоения космоса и жизни вне Земли является проблема создания искусственной гравитации.
Смотреть не стал, основное есть в текстовом варианте -"Искусственная гравитация для людей в космосе" (по обеим ссылкам одна и та же статья, просто форматировано по-разному):
ИСКУССТВЕННАЯ ГРАВИТАЦИЯ ДЛЯ ЛЮДЕЙ В КОСМОСЕ: ЭВОЛЮЦИЯ ИДЕЙ, ТЕХНОЛОГИЙ, ПРОЕКТОВ
Рассмотрена проблема создания и применения искусственной гравитации для людей в космосе как краткая история идей, технологий, проектов XIX-XXI веков в парадигме освоения космоса и жизни вне Земли. Даны: общее определение, описание способов создания искусственной гравитации, ее режимов, предложен вариант из четырех основных режимов. Сделаны: краткий анализ истории, периодизация, классификация, приведены важные примеры идей, технологий, проектов. Описаны реалии и перспективы. Сформулированы основные выводы и рекомендации. Ключевые слова: жизнь вне Земли, идея, искусственная гравитация, история, освоение космоса, проект, режим, технология, человек, эволюция Рассмотрена проблема создания и применения искусственной гравитации для людей в космосе как краткая история идей, технологий, проектов XIX-XXI веков в парадигме освоения космоса и жизни вне Земли. Даны: общее определение, описание способов создания искусственной гравитации, ее режимов, предложен вариант из четырех основных режимов. Сделаны: краткий анализ истории, периодизация, классификация, приведены важные примеры идей, технологий, проектов. Описаны реалии и перспективы. Сформулированы основные выводы и рекомендации. // cyberleninka.ruПара занятных фото-схем есть, но, к соажлению, по самым интересным как раз без подробностей.
До кучи утверждает, что по современным представлениям только по соображениям отсутствия гравитации (без учёта радиационных проблем) в совокупности за всю жизнь человеку нельзя проводить в космосе больше 3 лет (при этом непрерывно, "за раз", не более 1,5-2 лет).
Что в известном смысле дополнительно осложняет перспективы марсианской экспедиции.
Впрочем, и так всем не до неё.
Fakir> за всю жизнь человеку нельзя проводить в космосе больше 3 лет (при этом непрерывно, "за раз", не более 1,5-2 лет).
Fakir> Что в известном смысле дополнительно осложняет перспективы марсианской экспедиции.
Ну почему? Как раз полтора года туда, полтора - обратно.
Fakir> Что в известном смысле дополнительно осложняет перспективы марсианской экспедиции.
Ну почему? Как раз полтора года туда, полтора - обратно.

Непрерывно, "за раз", не более 1,5-2 лет. 3 - за всю жизнь. При этом между пребываниями в невесомости нужно восстановление при нормальных условиях, достаточно длительное (что-то типа до полугода и выше). На Марсе, мягко говоря, восстановление не особо получится - и тяжесть низкая, и не весь экипаж высаживается.
То есть это проблемы не решает. Только дополнительные вопросы. Долговременное влияние не нулевой, ПОНИЖЕННОЙ тяжести на человека вообще сплошная терра инкогнита - всё, что было, это какие-то считанные дни при 1/6g. А уж продолжительное пребывание при пониженной тяжести после и перед годом невесомости - ...
То есть это проблемы не решает. Только дополнительные вопросы. Долговременное влияние не нулевой, ПОНИЖЕННОЙ тяжести на человека вообще сплошная терра инкогнита - всё, что было, это какие-то считанные дни при 1/6g. А уж продолжительное пребывание при пониженной тяжести после и перед годом невесомости - ...
Fakir> А уж продолжительное пребывание при пониженной тяжести после и перед годом невесомости - ...
Лететь можно и три месяца. Просто остальное время на поверхности и следовательно доставлять соответствующее количество припасов. По-факту - полноценный жилой модуль сажать, а не обойтись будкой аля Аполло.
Лететь можно и три месяца. Просто остальное время на поверхности и следовательно доставлять соответствующее количество припасов. По-факту - полноценный жилой модуль сажать, а не обойтись будкой аля Аполло.
Дем> Лететь можно и три месяца.
Три месяца будет лететь будка а-дя Аполло. Что-то более серьёзное - по Гоману.
Три месяца будет лететь будка а-дя Аполло. Что-то более серьёзное - по Гоману.
Довольно любопытная статья и без воды:
Орлов О. И., Колотева М. И. Центрифуга короткого радиуса как новое средство профилактики неблагоприятных эффектов невесомости и перспективные планы по разработке проблемы искусственной силы тяжести применительно к межпланетным полетам // Авиакосмическая и экологическая медицина. 2017. Т. 51. № 7 (спецвыпуск). С. 11–18.
См.стр.11, по ссылке весь номер журнала:
 И до кучи немножко водянистого и завирального прожектёрства про лунные базы с картинками [показать]
И до кучи немножко водянистого и завирального прожектёрства про лунные базы с картинками [показать]
Орлов О. И., Колотева М. И. Центрифуга короткого радиуса как новое средство профилактики неблагоприятных эффектов невесомости и перспективные планы по разработке проблемы искусственной силы тяжести применительно к межпланетным полетам // Авиакосмическая и экологическая медицина. 2017. Т. 51. № 7 (спецвыпуск). С. 11–18.
См.стр.11, по ссылке весь номер журнала:
DOI:10.21687/0233-528X-2017-51-7-5-10 ñòð. 5 ñòð. 11 ñòð. 19 ñòð. 26 ñòð. 31 ñòð. 38 ñòð. 48 ñòð. 53 ñòð. 60 ñòð. 67 ñòð. 71 ñòð. 80 ñòð. 85 ñòð. 88 ñòð. 94 ñòð. 99 ñòð. 106 ñòð. 114 ñòð. 120 © ÃÍÖ ÐÔ ÈÌÁÏ ÐÀÍ Ðàçðàáîòêà è äèçàéí: Îëåã Ñîðîêèí // journal.imbp.ru

Fakir> и не весь экипаж высаживается.
Смысл-то какой сейчас не весь экипаж высаживать? HAL 9000 не взбрыкнет, а помрет вдруг орбитальный корабль - ну так и к мертвому пристыковаться смогут.
Смысл-то какой сейчас не весь экипаж высаживать? HAL 9000 не взбрыкнет, а помрет вдруг орбитальный корабль - ну так и к мертвому пристыковаться смогут.

Copyright © Balancer 1997..2022
Создано 14.06.2013
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.06.2013
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}