 Xan
Xan

 инфо
инфо инструменты
инструменты alex_zeed
alex_zeed
 umbriel
umbriel




 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/le/lenta/icdn/images/2015/03/16/19/20150316195607852/128x128-crop/original_16016ebbb7145331d02b346734615718.jpg)
Продраться через атмосферу.
Теги:
umbriel> Какое усилие нужно собсно?
Несколько кил.
Если пытаться раньше на сверхзвук перейти, то до 20 кГ (до 10 ?).
umbriel> ЗЫ. хоть чертеж принципиальный ракеты носителя привел бы")
Предполагается, что голова опирается на последний двигатель (последнюю ступень) через три линейных актуатора, так что может наклоняться в разные стороны.
В вакууме изменяется положение центра тяжести (относительно оси тяги), а в воздухе это даёт ещё и аэродинамический момент.
Рассматривал варианты установки моторчиков на первых ступенях (и провода к голове). Но много моторчиков жалко!
Несколько кил.
Если пытаться раньше на сверхзвук перейти, то до 20 кГ (до 10 ?).
umbriel> ЗЫ. хоть чертеж принципиальный ракеты носителя привел бы
Предполагается, что голова опирается на последний двигатель (последнюю ступень) через три линейных актуатора, так что может наклоняться в разные стороны.
В вакууме изменяется положение центра тяжести (относительно оси тяги), а в воздухе это даёт ещё и аэродинамический момент.
Рассматривал варианты установки моторчиков на первых ступенях (и провода к голове). Но много моторчиков жалко!



Xan> ЗЫ.
Xan> Я знаю место, где 17 аналогичных моторчиков. И всего за $400.
Xan> iSobot называется!
Че - правда на синхронниках сделан??? Я думал всех игрушечно-бытовых роботов делают на сервах, которые на коллекторниках... Ну и в любом случае там моторчики все ж попроще будут по массогабаритам, чем на micromo.
Да - а я зато знаю где мелкие сервы 5 граммов весом, 0.8 кг*см по 3.5 бакса - и робота разбирать не надо Вот тут http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=663 Ну и там еще разные есть. Хотя может это все и слабовато будет для ракеты...
И если уж на то пошло (все что идет дальше - глубокое ИМХО) - для ракеты и коллекторников хватит с головой. Долговечность ракете не нужна вообще, а в частности - шарикоподшипники в моторах совсем необязательны. А зато коллекторниками управлять проще, чем трехфазным PMSM, и транзисторов, и ног контроллера на это надо меньше. Я кстати не понял - там супермелкие моторы с датчиками положения или нет? Если нет - как предполагается управлять?
А по компоновке тоже вопрос, может глупый - а обязательно ставить УВТ на последнюю ступень? Ведь это же по массе самый невыгодный вариант... Может можно поставить управление к примеру на предпоследнюю, а перед отделением предпоследней ступени ракету раскрутить? А последнюю ступень сделать неуправляемой?
Xan> Я знаю место, где 17 аналогичных моторчиков. И всего за $400.
Xan> iSobot называется!
Че - правда на синхронниках сделан??? Я думал всех игрушечно-бытовых роботов делают на сервах, которые на коллекторниках... Ну и в любом случае там моторчики все ж попроще будут по массогабаритам, чем на micromo.
Да - а я зато знаю где мелкие сервы 5 граммов весом, 0.8 кг*см по 3.5 бакса - и робота разбирать не надо
Вот тут http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=663 Ну и там еще разные есть. Хотя может это все и слабовато будет для ракеты...И если уж на то пошло (все что идет дальше - глубокое ИМХО) - для ракеты и коллекторников хватит с головой. Долговечность ракете не нужна вообще, а в частности - шарикоподшипники в моторах совсем необязательны. А зато коллекторниками управлять проще, чем трехфазным PMSM, и транзисторов, и ног контроллера на это надо меньше. Я кстати не понял - там супермелкие моторы с датчиками положения или нет? Если нет - как предполагается управлять?
А по компоновке тоже вопрос, может глупый - а обязательно ставить УВТ на последнюю ступень? Ведь это же по массе самый невыгодный вариант... Может можно поставить управление к примеру на предпоследнюю, а перед отделением предпоследней ступени ракету раскрутить? А последнюю ступень сделать неуправляемой?

alex_zeed> Че - правда на синхронниках сделан???
Наверняка не знаю, но похоже, что там шаговики.
alex_zeed> Я думал всех игрушечно-бытовых роботов делают на сервах, которые на коллекторниках... Ну и в любом случае там моторчики все ж попроще будут по массогабаритам, чем на micromo.
Да откуда ж "попроще"?
Якорь, коллектор, щётки.
А в шаговике ( = в синхроннике) - в роторе постоянный магнит, а катушки в статоре.
Ну и коллекторному обязательна обратная связь нужна, чтоб точно крутить, а шаговику не надо.
alex_zeed> Да - а я зато знаю где мелкие сервы 5 граммов весом, 0.8 кг*см по 3.5 бакса - и робота разбирать не надо Вот тут http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=663
Пробую инфу из них выжать
alex_zeed> И если уж на то пошло (все что идет дальше - глубокое ИМХО) - для ракеты и коллекторников хватит с головой. Долговечность ракете не нужна вообще, а в частности - шарикоподшипники в моторах совсем необязательны.
Ну шарикоподшипники там просто есть, я не виноват!
alex_zeed> А зато коллекторниками управлять проще, чем трехфазным PMSM, и транзисторов, и ног контроллера на это надо меньше.
Транзисторов и ног - всего в полтора раза. Зато можно без обратной связи, что тоже экономит.
alex_zeed> Я кстати не понял - там супермелкие моторы с датчиками положения или нет? Если нет - как предполагается управлять?
Там есть и просто шаговые, без датчиков, а есть "серво" - с датчиками (Servomotor_0620_B_MME.pdf).
alex_zeed> А по компоновке тоже вопрос, может глупый - а обязательно ставить УВТ на последнюю ступень?
Денег-то жалко, если при каждом пуске управлялка будет улетать насовсем. С семью моторчиками по триста баксов.
Поэтому хочется всё в одном месте, и чтоб это возвращалось. Хотя бы при пробных пусках.
Предполагается, что сначала эта хреновина должна слетать вертикально на километр, на десять, на сто. А только потом пытаться на орбиту.
Так что GPS, радио, крылышки, планирование прямо в руки - всё надо.
Ну а если до спутника дойдёт, то надо ж на него полезную нагрузку повесить, чтоб не только пикал, но и фотокамеру.
А для фотокамеры надо ориентацию. И, кстати, для солнечной батареи - тоже. Аккумулятора надолго не хватит.
Поэтому получается, что всё должно быть в голове.
Наверняка не знаю, но похоже, что там шаговики.
alex_zeed> Я думал всех игрушечно-бытовых роботов делают на сервах, которые на коллекторниках... Ну и в любом случае там моторчики все ж попроще будут по массогабаритам, чем на micromo.
Да откуда ж "попроще"?
Якорь, коллектор, щётки.
А в шаговике ( = в синхроннике) - в роторе постоянный магнит, а катушки в статоре.
Ну и коллекторному обязательна обратная связь нужна, чтоб точно крутить, а шаговику не надо.
alex_zeed> Да - а я зато знаю где мелкие сервы 5 граммов весом, 0.8 кг*см по 3.5 бакса - и робота разбирать не надо
Вот тут http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=663Пробую инфу из них выжать
alex_zeed> И если уж на то пошло (все что идет дальше - глубокое ИМХО) - для ракеты и коллекторников хватит с головой. Долговечность ракете не нужна вообще, а в частности - шарикоподшипники в моторах совсем необязательны.
Ну шарикоподшипники там просто есть, я не виноват!
alex_zeed> А зато коллекторниками управлять проще, чем трехфазным PMSM, и транзисторов, и ног контроллера на это надо меньше.
Транзисторов и ног - всего в полтора раза. Зато можно без обратной связи, что тоже экономит.
alex_zeed> Я кстати не понял - там супермелкие моторы с датчиками положения или нет? Если нет - как предполагается управлять?
Там есть и просто шаговые, без датчиков, а есть "серво" - с датчиками (Servomotor_0620_B_MME.pdf).
alex_zeed> А по компоновке тоже вопрос, может глупый - а обязательно ставить УВТ на последнюю ступень?
Денег-то жалко, если при каждом пуске управлялка будет улетать насовсем. С семью моторчиками по триста баксов.
Поэтому хочется всё в одном месте, и чтоб это возвращалось. Хотя бы при пробных пусках.
Предполагается, что сначала эта хреновина должна слетать вертикально на километр, на десять, на сто. А только потом пытаться на орбиту.
Так что GPS, радио, крылышки, планирование прямо в руки - всё надо.
Ну а если до спутника дойдёт, то надо ж на него полезную нагрузку повесить, чтоб не только пикал, но и фотокамеру.
А для фотокамеры надо ориентацию. И, кстати, для солнечной батареи - тоже. Аккумулятора надолго не хватит.
Поэтому получается, что всё должно быть в голове.
Посмотрел на моторчики, например, на этот:
http://www.hobbycity.com/hobbycity/.../uh_viewItem.asp?idProduct=8690
Получается, что у него выходная мощность 1.03 ватта, если тупо момент на скорость умножить. На самом деле может быть раза в три-четыре меньше, ну 0.3 ватта.
В общем, он примерно похож по мощности на моторчик от микромо (хотя врядли будет работать при 100 градусах).
Плохо, что обратной связи нет.
http://www.hobbycity.com/hobbycity/.../uh_viewItem.asp?idProduct=8690
Получается, что у него выходная мощность 1.03 ватта, если тупо момент на скорость умножить. На самом деле может быть раза в три-четыре меньше, ну 0.3 ватта.
В общем, он примерно похож по мощности на моторчик от микромо (хотя врядли будет работать при 100 градусах).
Плохо, что обратной связи нет.
В смысле - обратной связи нет? Если это о сервах по ссылкам, то там совершенно стандартная конструкция, потенциометр там на валу и регулятор, правда аналоговый.
Только ни о каких 100 градусах речь идти не может - пластмассовый редуктор Плюсы именно тех серв - только низкая цена. Бывают варианты подороже, с металлическим редуктором. Вообще в эту сторону надо копать авиамодельные сайты - у них те же проблемы, минимум веса при заданной мощности, и они их как-то решают.
Плюсы именно тех серв - только низкая цена. Бывают варианты подороже, с металлическим редуктором. Вообще в эту сторону надо копать авиамодельные сайты - у них те же проблемы, минимум веса при заданной мощности, и они их как-то решают.
А насчет поэтапного тестирования и крылышек с GPS - полностью согласен. Но мне кажется, что это реализуемо и с УВТ на предпоследней ступени. Более того, ракету можно пускать с заменителем последней ступени, в который натолкать намного больше регистрирующего оборудования, чем просто в штатную голову.
То есть план может быть такой:
1. Старт всех ступеней кроме последней, на 1, 10, сколько получится км, с возвратом и анализом полета. Вместо последней ступени - массогабаритный аналог, возможно с системой спасения.
2. Наземный тест отдельно последней ступени, с определением ее импульса. Или старт ее с земли с анализом траектории. Возможен старт двух последних ступеней с проверкой правильности раскрутки и работы системы их разделения.
3. Старт всего комплекса с целью выхода на орбиту.
Пока не соображу чем удобнее раскручивать - но это же в принципе реализуемо? Раскручиваться (управляемо) должна по идее пустая или почти пустая предпоследняя ступень - которая затем поджигает последнюю и та уже неуправляемо набирает остаток скорости, вращаясь для стабилизации траектории.
А вообще идея заманушная... А у вас в Казахстане как к любительским космическим ракетам относятся? У нас я бы не рискнул пускать, вдруг кто-нить из компетентных обидится?
Только ни о каких 100 градусах речь идти не может - пластмассовый редуктор
Плюсы именно тех серв - только низкая цена. Бывают варианты подороже, с металлическим редуктором. Вообще в эту сторону надо копать авиамодельные сайты - у них те же проблемы, минимум веса при заданной мощности, и они их как-то решают.А насчет поэтапного тестирования и крылышек с GPS - полностью согласен. Но мне кажется, что это реализуемо и с УВТ на предпоследней ступени. Более того, ракету можно пускать с заменителем последней ступени, в который натолкать намного больше регистрирующего оборудования, чем просто в штатную голову.
То есть план может быть такой:
1. Старт всех ступеней кроме последней, на 1, 10, сколько получится км, с возвратом и анализом полета. Вместо последней ступени - массогабаритный аналог, возможно с системой спасения.
2. Наземный тест отдельно последней ступени, с определением ее импульса. Или старт ее с земли с анализом траектории. Возможен старт двух последних ступеней с проверкой правильности раскрутки и работы системы их разделения.
3. Старт всего комплекса с целью выхода на орбиту.
Пока не соображу чем удобнее раскручивать - но это же в принципе реализуемо? Раскручиваться (управляемо) должна по идее пустая или почти пустая предпоследняя ступень - которая затем поджигает последнюю и та уже неуправляемо набирает остаток скорости, вращаясь для стабилизации траектории.
А вообще идея заманушная... А у вас в Казахстане как к любительским космическим ракетам относятся? У нас я бы не рискнул пускать, вдруг кто-нить из компетентных обидится?
alex_zeed> В смысле - обратной связи нет? Если это о сервах по ссылкам, то там совершенно стандартная конструкция, потенциометр там на валу и регулятор, правда аналоговый.
Доков не нашёл. Где-нибудь есть?
Что там делает потенциометр?
alex_zeed> Но мне кажется, что это реализуемо и с УВТ на предпоследней ступени. Более того, ракету можно пускать с заменителем последней ступени, в который натолкать намного больше регистрирующего оборудования, чем просто в штатную голову.
Электроника с датчиками весит немного, ориентировочно 25 граммов. +8 граммов батарейка (или 16, если две).
Все датчики, которые интересны, они уже должны быть в комплекте, так что ничего дополнительного не нужно.
alex_zeed> Вместо последней ступени - массогабаритный аналог, возможно с системой спасения.
Лучше часть промежуточных ступеней заменить на болванки, тогда при вертикальном полёте можно отрабатывать последние ступени.
Вращать "для стабилизации" не хочу. Лучше и последнюю управляемую сделать, можно будет притормозить, если импульса перебор. А точно его на земле не определить.
alex_zeed> А у вас в Казахстане как к любительским космическим ракетам относятся? У нас я бы не рискнул пускать, вдруг кто-нить из компетентных обидится?
В Казахстане космическая мафия вставила в закон требования "высшее ракетное образование и 3 гора работы по специальности". Сделано это чтоб уменьшить конкуренцию.
Но получилось, что любителям полный запрет.
Надо, наверное, в другою страну ехать. На Украину, что-ли? Или в Англию, под N-prize.
Но это всё пока теория. Возможно, придётся деньги зарабатывать и хобби отложится в неопределённость.
Доков не нашёл. Где-нибудь есть?
Что там делает потенциометр?
alex_zeed> Но мне кажется, что это реализуемо и с УВТ на предпоследней ступени. Более того, ракету можно пускать с заменителем последней ступени, в который натолкать намного больше регистрирующего оборудования, чем просто в штатную голову.
Электроника с датчиками весит немного, ориентировочно 25 граммов. +8 граммов батарейка (или 16, если две).
Все датчики, которые интересны, они уже должны быть в комплекте, так что ничего дополнительного не нужно.
alex_zeed> Вместо последней ступени - массогабаритный аналог, возможно с системой спасения.
Лучше часть промежуточных ступеней заменить на болванки, тогда при вертикальном полёте можно отрабатывать последние ступени.
Вращать "для стабилизации" не хочу. Лучше и последнюю управляемую сделать, можно будет притормозить, если импульса перебор. А точно его на земле не определить.
alex_zeed> А у вас в Казахстане как к любительским космическим ракетам относятся? У нас я бы не рискнул пускать, вдруг кто-нить из компетентных обидится?
В Казахстане космическая мафия вставила в закон требования "высшее ракетное образование и 3 гора работы по специальности". Сделано это чтоб уменьшить конкуренцию.
Но получилось, что любителям полный запрет.
Надо, наверное, в другою страну ехать. На Украину, что-ли? Или в Англию, под N-prize.
Но это всё пока теория. Возможно, придётся деньги зарабатывать и хобби отложится в неопределённость.
Xan> Доков не нашёл. Где-нибудь есть?
Xan> Что там делает потенциометр?
ОС по положению (углу поворота) выходного вала. Управление - ШИМ-сигналом с периодом 20 мс и длительностью от 0.7 до 2.2 мс (1.5 мс - среднее положение), это самый распространенный стандарт, благодаря ему почти любые сервомашинки подходят почти к любой аппаратуре радиоуправления.
Да, но никто не мешает заменить регулятор на свой или вообще все драйверы движков поместить на одной плате для облегчения.
Вот неплохая обзорная статья по сервомашинкам: Аппаратура радиоуправления. Часть 3. Рулевые машинки
Xan> Что там делает потенциометр?
ОС по положению (углу поворота) выходного вала. Управление - ШИМ-сигналом с периодом 20 мс и длительностью от 0.7 до 2.2 мс (1.5 мс - среднее положение), это самый распространенный стандарт, благодаря ему почти любые сервомашинки подходят почти к любой аппаратуре радиоуправления.
Да, но никто не мешает заменить регулятор на свой или вообще все драйверы движков поместить на одной плате для облегчения.
Вот неплохая обзорная статья по сервомашинкам: Аппаратура радиоуправления. Часть 3. Рулевые машинки

Xan> Предполагается, что голова опирается на последний двигатель (последнюю ступень) через три линейных актуатора, так что может наклоняться в разные стороны.
Xan> В вакууме изменяется положение центра тяжести (относительно оси тяги), а в воздухе это даёт ещё и аэродинамический момент.
Я имел в виду вообще, энергетическую часть, ХС ракеты. Сколько ступеней предполагается?
Первая понятно: ЖРД на топливе Г, а дальше что?
alex_zeed> Вот неплохая обзорная статья по сервомашинкам: Аппаратура радиоуправления. Часть 3. Рулевые машинки
Очень интересно!
Xan> В вакууме изменяется положение центра тяжести (относительно оси тяги), а в воздухе это даёт ещё и аэродинамический момент.
Я имел в виду вообще, энергетическую часть, ХС ракеты. Сколько ступеней предполагается?
Первая понятно: ЖРД на топливе Г, а дальше что?
alex_zeed> Вот неплохая обзорная статья по сервомашинкам: Аппаратура радиоуправления. Часть 3. Рулевые машинки
Очень интересно!
umbriel> Я имел в виду вообще, энергетическую часть, ХС ракеты. Сколько ступеней предполагается?
Штук 6.
Зависит от того, удастся ли получить время работы больше примерно 20 секунд.
Атмосферная часть гадит, 80 секунд надо в сумме.
В вакууме, там можно ускорение большое сделать, например 30 g, время работы одной ступени секунд 15.
На атмосферную часть уйдёт примерно 4.2 км/с ХС.
От ракеты останется 20% массы, при этом скорость будет около 2 км/с под углом градусов 30...45 от вертикали, так что горизонтальная составляющая в пределах 1.0...1.4 км/с.
То есть, потери от атмосферы около 3 км/с.
umbriel> Первая понятно: ЖРД на топливе Г, а дальше что?
Не, я надеюсь, всё твёрдотопливное сделать.
"Лучше безобразно, но однообразно."
Дополнительные разработки - ну нафиг. Время жизни не бесконечное.
А "Г" - это если луноход на Луну сажать!
Штук 6.
Зависит от того, удастся ли получить время работы больше примерно 20 секунд.
Атмосферная часть гадит, 80 секунд надо в сумме.
В вакууме, там можно ускорение большое сделать, например 30 g, время работы одной ступени секунд 15.
На атмосферную часть уйдёт примерно 4.2 км/с ХС.
От ракеты останется 20% массы, при этом скорость будет около 2 км/с под углом градусов 30...45 от вертикали, так что горизонтальная составляющая в пределах 1.0...1.4 км/с.
То есть, потери от атмосферы около 3 км/с.
umbriel> Первая понятно: ЖРД на топливе Г, а дальше что?
Не, я надеюсь, всё твёрдотопливное сделать.
"Лучше безобразно, но однообразно."
Дополнительные разработки - ну нафиг. Время жизни не бесконечное.
А "Г" - это если луноход на Луну сажать!
alex_zeed> Вот неплохая обзорная статья по сервомашинкам: Аппаратура радиоуправления. Часть 3. Рулевые машинки
Вообще, из спортивного интереса, было б здорово сделать на всём "игрушечном", а не на "взрослом".
Вообще, из спортивного интереса, было б здорово сделать на всём "игрушечном", а не на "взрослом".
Xan> На атмосферную часть уйдёт примерно 4.2 км/с ХС.
Я считал(моделировал) 4х ступенчатую ~150кг, получались потери <1 км/с, по твоему Cx
Правда просто вверх.
Xan> Не, я надеюсь, всё твёрдотопливное сделать.
А какое топливо? При маленьком диаметре критики большие потери из-за конденсированной фазы.
(Это особенно касается верхней ступени)
Я считал(моделировал) 4х ступенчатую ~150кг, получались потери <1 км/с, по твоему Cx
Правда просто вверх.
Xan> Не, я надеюсь, всё твёрдотопливное сделать.
А какое топливо? При маленьком диаметре критики большие потери из-за конденсированной фазы.
(Это особенно касается верхней ступени)
Прикреплённые файлы:
umbriel> А какое топливо? При маленьком диаметре критики большие потери из-за конденсированной фазы.
Да я что-то склоняюсь к ПХА с эпоксидкой и ничего больше.
Температура заметно меньше, возможно, на теплозащите съэкономится.
umbriel> (Это особенно касается верхней ступени)
Твёрдая фаза?
На картинке, кстати, графики так хорошо загибаются, что при диаметре меньше 9 мм тяга вообще будет отрицательная!
У врагов есть движок с дыркой 3.84 мм
Propellant specific impulse — 275.6
Effective specific impulse — 269.4
Теряют всего 2.3%.
Если я правильно понимаю.
Да я что-то склоняюсь к ПХА с эпоксидкой и ничего больше.
Температура заметно меньше, возможно, на теплозащите съэкономится.
umbriel> (Это особенно касается верхней ступени)
Твёрдая фаза?
На картинке, кстати, графики так хорошо загибаются, что при диаметре меньше 9 мм тяга вообще будет отрицательная!
У врагов есть движок с дыркой 3.84 мм
Propellant specific impulse — 275.6
Effective specific impulse — 269.4
Теряют всего 2.3%.
Если я правильно понимаю.
Xan> У врагов есть движок с дыркой 3.84 мм
У каких врагов, покажи 8)
У каких врагов, покажи 8)
Это сообщение редактировалось 20.03.2009 в 09:16
umbriel> У каких врагов, покажи 8)
При коммунизме "врагами" стандартно называли американцев.
ATK Tactical Propulsion and Control Systems
55 Thiokol Road
Elkton, MD 21921
Tel 410 392-1000
Fax 410 392-1205
Space_Products_Catalog_B.pdf, p.17.
Документ 23 метра длиной.
При коммунизме "врагами" стандартно называли американцев.
ATK Tactical Propulsion and Control Systems
55 Thiokol Road
Elkton, MD 21921
Tel 410 392-1000
Fax 410 392-1205
Space_Products_Catalog_B.pdf, p.17.
Документ 23 метра длиной.
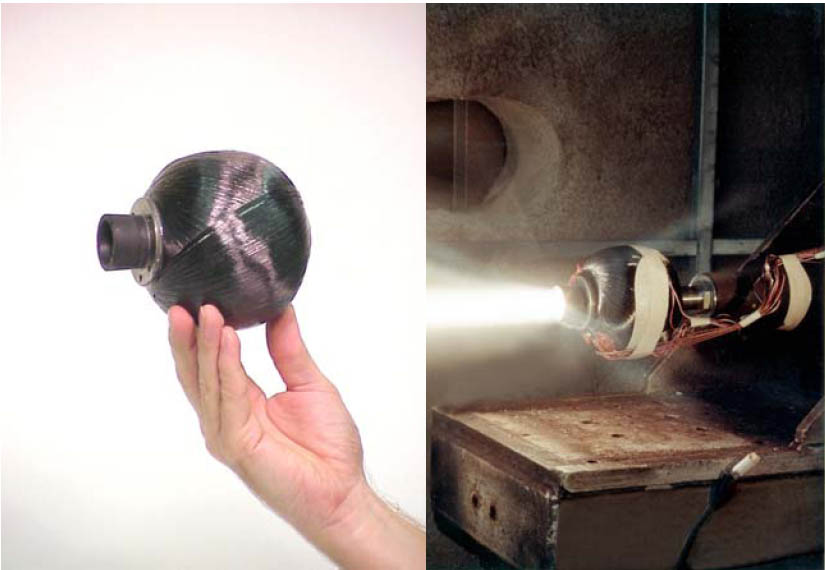
Да, красавец конечно
Интересно, что там за топливо. ПХА при очень большом давлении горит медленно, может поэтому так?
STAR 4G
This STAR motor was developed and tested in January 2000 under a NASA Goddard Space Flight Center program for a low-cost, high mass fraction orbit adjust motor for use in deploying constellations of very small satellites (nanosatellites). The first static test of the STAR 4G prototype motor was conducted 8 months after program start. The motor is designed to operate at high chamber pressure and incorporates a noneroding throat insert to maximize specific impulse.
MOTOR DIMENSIONS
Motor diameter, in................................................4.45
Motor length, in. ...................................................5.43
MOTOR PERFORMANCE (70°F VACUUM)
Burn time/action time, sec ...........................10.3/10.8
Ignition delay time, sec ......................................0.035
Burn time average chamber pressure, psia.......2,185
Maximum chamber pressure, psia ....................2,600
Total impulse, lbf-sec............................................595
Propellant specific impulse, lbf-sec/lbm.............275.6
Effective specific impulse, lbf-sec/lbm...............269.4
Burn time average thrust, lbf...................................58
Maximum thrust, lbf ................................................69
NOZZLE
Initial throat diameter, in. .....................................0.15
Exit diameter, in. ..................................................1.13
Expansion ratio, initial.......................................56.8:1
WEIGHTS, LBM
Total loaded .........................................................3.30
Propellant ............................................................2.16
Heavyweight Nano ESA ......................................0.17
Case assembly ....................................................0.49
Nozzle assembly .................................................0.46
Total inert.............................................................1.12
Burnout ................................................................1.07
Propellant mass fraction ......................................0.65
TEMPERATURE LIMITS
Operation ..................................................... 40º-90°F
Storage ...................................................... 40º-100°F
PROPELLANT DESIGNATION........... TP-H-3399
CASE MATERIAL..........Graphite-epoxy composite
PRODUCTION STATUS.................. Development
Интересно, что там за топливо. ПХА при очень большом давлении горит медленно, может поэтому так?
STAR 4G
This STAR motor was developed and tested in January 2000 under a NASA Goddard Space Flight Center program for a low-cost, high mass fraction orbit adjust motor for use in deploying constellations of very small satellites (nanosatellites). The first static test of the STAR 4G prototype motor was conducted 8 months after program start. The motor is designed to operate at high chamber pressure and incorporates a noneroding throat insert to maximize specific impulse.
MOTOR DIMENSIONS
Motor diameter, in................................................4.45
Motor length, in. ...................................................5.43
MOTOR PERFORMANCE (70°F VACUUM)
Burn time/action time, sec ...........................10.3/10.8
Ignition delay time, sec ......................................0.035
Burn time average chamber pressure, psia.......2,185
Maximum chamber pressure, psia ....................2,600
Total impulse, lbf-sec............................................595
Propellant specific impulse, lbf-sec/lbm.............275.6
Effective specific impulse, lbf-sec/lbm...............269.4
Burn time average thrust, lbf...................................58
Maximum thrust, lbf ................................................69
NOZZLE
Initial throat diameter, in. .....................................0.15
Exit diameter, in. ..................................................1.13
Expansion ratio, initial.......................................56.8:1
WEIGHTS, LBM
Total loaded .........................................................3.30
Propellant ............................................................2.16
Heavyweight Nano ESA ......................................0.17
Case assembly ....................................................0.49
Nozzle assembly .................................................0.46
Total inert.............................................................1.12
Burnout ................................................................1.07
Propellant mass fraction ......................................0.65
TEMPERATURE LIMITS
Operation ..................................................... 40º-90°F
Storage ...................................................... 40º-100°F
PROPELLANT DESIGNATION........... TP-H-3399
CASE MATERIAL..........Graphite-epoxy composite
PRODUCTION STATUS.................. Development
Прикреплённые файлы:
Импульс вакуумный, не так ли?
Тогда очень скромные характеристики двигателя.
Особенно массовое совершенство. При таком геморрое как мотаный углепластиковый монокок.
Тогда очень скромные характеристики двигателя.
Особенно массовое совершенство. При таком геморрое как мотаный углепластиковый монокок.

RLAN> Импульс вакуумный, не так ли?
При таком большом давлении и степени расширения импульс скорее всего одинаковый
При таком большом давлении и степени расширения импульс скорее всего одинаковый
Это сообщение редактировалось 20.03.2009 в 15:24
Будет отличаться на 10%
А это уже 240 на земле.
А это уже 240 на земле.

repository
новичок
Xan> Я думаю, просто аналоговый сделать, по каждому углу пара сенсоров дифференциально.
А есть готовая схема? (я запаять могу, а расчитать сам неа:))
А есть готовая схема? (я запаять могу, а расчитать сам неа:))
Xan>> Я думаю, просто аналоговый сделать, по каждому углу пара сенсоров дифференциально.
repository> А есть готовая схема? (я запаять могу, а расчитать сам неа:))
Эти сенсоры уже дообсуждались в теме "Кобра". На последних страницах.
Для себя сделал вывод, что придётся делать другого типа: два датчика солнца, каждый из линейной диафрагмы и перпендикулярного ей линейного сенсора (что-нибудь такое: TSL201R-LF — 64 * 1 LINEAR SENSOR ARRAY). Каждый датчик меряет один из уголов на солнце.
Потому что если аналоговый, то на него будет влиять засветка от атмосферы. Например, просто фоновый свет добавить, и он покажет меньший угол.
repository> А есть готовая схема? (я запаять могу, а расчитать сам неа:))
Эти сенсоры уже дообсуждались в теме "Кобра". На последних страницах.
Для себя сделал вывод, что придётся делать другого типа: два датчика солнца, каждый из линейной диафрагмы и перпендикулярного ей линейного сенсора (что-нибудь такое: TSL201R-LF — 64 * 1 LINEAR SENSOR ARRAY). Каждый датчик меряет один из уголов на солнце.
Потому что если аналоговый, то на него будет влиять засветка от атмосферы. Например, просто фоновый свет добавить, и он покажет меньший угол.
repository
новичок
Xan> Для себя сделал вывод, что придётся делать другого типа: два датчика солнца, каждый из линейной диафрагмы и перпендикулярного ей линейного сенсора (что-нибудь такое: TSL201R-LF — 64 * 1 LINEAR SENSOR ARRAY). Каждый датчик меряет один из уголов на солнце.
Правильно ли я понял - это грубо говоря 64 дачика, и узкая полоса света на них, что бы в каждый момент только примерно 1 дачик был засвечен?
Правильно ли я понял - это грубо говоря 64 дачика, и узкая полоса света на них, что бы в каждый момент только примерно 1 дачик был засвечен?
repository> Правильно ли я понял - это грубо говоря 64 дачика, и узкая полоса света на них, что бы в каждый момент только примерно 1 дачик был засвечен?
Да.
Примерно правильно.
На самом деле лучше иметь несфокусированный свет с плавными границами, которрый засвечивает сразу несколько пикселов с разной интенсивностью.
Тогда можно получить положение центра луча с лучшей точностью, чем позволяет просто дискретность сенсора.
Да.
Примерно правильно.
На самом деле лучше иметь несфокусированный свет с плавными границами, которрый засвечивает сразу несколько пикселов с разной интенсивностью.
Тогда можно получить положение центра луча с лучшей точностью, чем позволяет просто дискретность сенсора.
repository
новичок
Я не очень понимаю как это конструктивно выглядит - 2 щели охватывающие 180 градусов. Можете эскизнуть в честь праздника? моя благодарность не будет иметь границ:)
Это сообщение редактировалось 12.04.2009 в 14:35
Реклама Google — средство выживания форумов :)
repository> Можете эскизнуть в честь праздника?
"Сенсором" я называю микросхему, а "датчиком" - всю конструкцию с этой микросхемой.
Вот картинка.
Щель (диафрагма) вдоль оси Y и перпендикулярна линейке сенсора (вдоль оси X).
Щель на некоторой высоте над сенсором (по Z).
Если источник света отклоняется по Y, то полоса света попадает всё время в одну и ту же часть сенсора, сенсор изменения не чувствует.
Если по X, то сенсор будет видеть изменение положения.
У второго датчика щель вдоль оси X, а линейка сенсора вдоль Y.
И он чувствует отклонение по Y.
Таким образом два датчика позволяют определить два угла направления на источник.
"Сенсором" я называю микросхему, а "датчиком" - всю конструкцию с этой микросхемой.
Вот картинка.
Щель (диафрагма) вдоль оси Y и перпендикулярна линейке сенсора (вдоль оси X).
Щель на некоторой высоте над сенсором (по Z).
Если источник света отклоняется по Y, то полоса света попадает всё время в одну и ту же часть сенсора, сенсор изменения не чувствует.
Если по X, то сенсор будет видеть изменение положения.
У второго датчика щель вдоль оси X, а линейка сенсора вдоль Y.
И он чувствует отклонение по Y.
Таким образом два датчика позволяют определить два угла направления на источник.
Прикреплённые файлы:

Copyright © Balancer 1997..2019
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
