 Xan
Xan

 инфо
инфо инструменты
инструменты Бывший генералиссимус
Бывший генералиссимус

 pinko
pinko


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
Б.г.> и один на FT232.
Сейчас попробовал FT323.
Проверил на десктопе и на ноуте.
115200 — OK
230400 — OK
460800 — OK
921600 — OK
Кварц у меня 14.7456 = 115200 * 128 — позволяет получить всякие скорости.
В отличие от 18.432 = 115200 * 5 * 32.
Сейчас попробовал FT323.
Проверил на десктопе и на ноуте.
115200 — OK
230400 — OK
460800 — OK
921600 — OK
Кварц у меня 14.7456 = 115200 * 128 — позволяет получить всякие скорости.
В отличие от 18.432 = 115200 * 5 * 32.


Б.г.>>> Или я где-то прокалываюсь с алгоритмом, или уже шарики за ролики зашли.
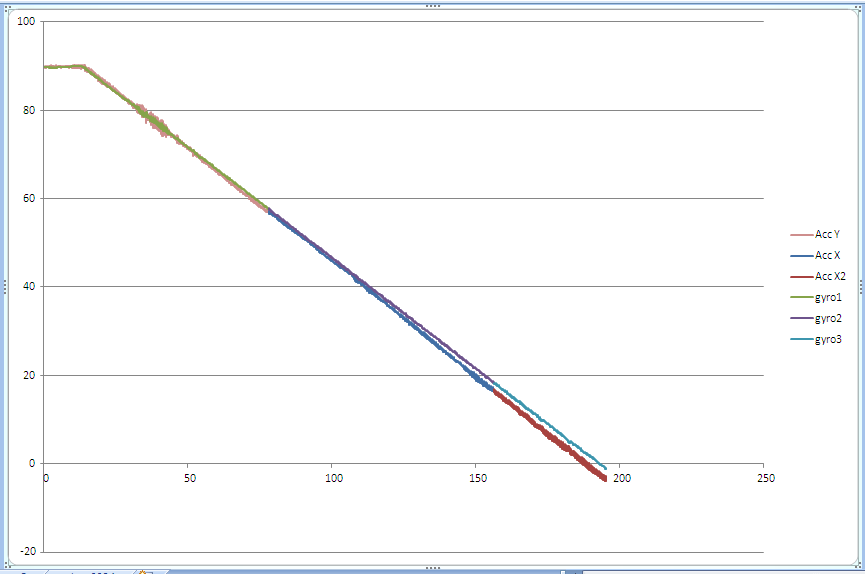
Ну, что, разобрался я с коэффициентами и термо-, и G-коррекции, теперь попадаю в пределах 2 градусов разницы между инклинометром и гироскопом:
Ну, что, разобрался я с коэффициентами и термо-, и G-коррекции, теперь попадаю в пределах 2 градусов разницы между инклинометром и гироскопом:
Прикреплённые файлы:

Б.г.>>>> Или я где-то прокалываюсь с алгоритмом, или уже шарики за ролики зашли.
Б.г.> Ну, что, разобрался я с коэффициентами и термо-, и G-коррекции, теперь попадаю в пределах 2 градусов разницы между инклинометром и гироскопом:
Два градуса - это, всё же, чересчур оптимистично. Как вы думаете, сильно ли отличаются 1/180 (теоретическое значение) и 3/512 (то, что мне легче посчитать в целых числах)?
Интегрирование, однако, выдаёт всё точно - разница 6%.
Но, по сравнению с тем, что было - небо и земля.
Б.г.> Ну, что, разобрался я с коэффициентами и термо-, и G-коррекции, теперь попадаю в пределах 2 градусов разницы между инклинометром и гироскопом:
Два градуса - это, всё же, чересчур оптимистично. Как вы думаете, сильно ли отличаются 1/180 (теоретическое значение) и 3/512 (то, что мне легче посчитать в целых числах)?
Интегрирование, однако, выдаёт всё точно - разница 6%.
Но, по сравнению с тем, что было - небо и земля.
Прикреплённые файлы:


Итак, пришлось осваивать "стандартные" рулевые машинки.
Savox SH-0253

Если мотор я кручу ШИМом со скважностью, номинально близкой к 50%, то, для управления рулевой машинкой мне требуется около 5%.
В результате, при 8-битном ШИМе у меня всего 19 положений на "нормальный" рабочий ход, и 29 на "расширенный" (от 0,7 мс до 2,3 мс).
Вдобавок, эти зверики капризничают при включении, потому что цифровые, и, вроде как, программируемые.
Savox SH-0253
Сервопривод Savox SH-0253
Высокоскоростная цифровая микро серво Savоx SH-0253. Особенности: Специальный изысканный дизайн серво микро размера. Металлический корпус отлично выглядит и улучшает охлаждение. Металличе // www.pilotage-rc.ruЕсли мотор я кручу ШИМом со скважностью, номинально близкой к 50%, то, для управления рулевой машинкой мне требуется около 5%.
В результате, при 8-битном ШИМе у меня всего 19 положений на "нормальный" рабочий ход, и 29 на "расширенный" (от 0,7 мс до 2,3 мс).
Вдобавок, эти зверики капризничают при включении, потому что цифровые, и, вроде как, программируемые.

Б.г.> Итак, пришлось осваивать "стандартные" рулевые машинки....
Привет Б.г.,
Как будеш устанавливать рулевые машинки? Другой вопрос - насколько быстро ты читаеш данные гироскопов?
Pinko
П.с. Я сделал круглая печатная плата и специальной рамы для моего устройства...






Привет Б.г.,
Как будеш устанавливать рулевые машинки? Другой вопрос - насколько быстро ты читаеш данные гироскопов?
Pinko
П.с. Я сделал круглая печатная плата и специальной рамы для моего устройства...

Это сообщение редактировалось 01.06.2015 в 17:24
Б.г.> В результате, при 8-битном ШИМе у меня всего 19 положений на "нормальный" рабочий ход, и 29 на "расширенный" (от 0,7 мс до 2,3 мс).
В микроконтроллере же есть железный ШИМ.
Как правило, с очень мелким дискретом = 1/f_osc.
Я даже придумал способ увеличения числа каналов железного ШИМа, из трёх собирался делать 8. Путём двух микрух 78x08.
Но сейчас архитектура поменялась — теперь у каждой ступени свой "мозжечок", который выдаёт два шима на машинки и зажигает свои зажигалки.
И RS485 вдоль всей ракеты.
В микроконтроллере же есть железный ШИМ.
Как правило, с очень мелким дискретом = 1/f_osc.
Я даже придумал способ увеличения числа каналов железного ШИМа, из трёх собирался делать 8. Путём двух микрух 78x08.
Но сейчас архитектура поменялась — теперь у каждой ступени свой "мозжечок", который выдаёт два шима на машинки и зажигает свои зажигалки.
И RS485 вдоль всей ракеты.
Это сообщение редактировалось 01.06.2015 в 19:07
pinko> П.с. Я сделал круглая печатная плата
1. Я очень давно решил, что платы должны располагаться вдоль оси. Ещё когда скважинные приборы делал.
Никаких круглых или пятиугольных!")
2. Я давно не ставлю в электронику электролитические конденсаторы. Они большие, тяжёлые и бестолковые. Только керамические. Но зато много!
В электронике помехи в основном высокочастотные, для них надо маленькие ёмкости, но малоиндуктивные.
1. Я очень давно решил, что платы должны располагаться вдоль оси. Ещё когда скважинные приборы делал.
Никаких круглых или пятиугольных!
2. Я давно не ставлю в электронику электролитические конденсаторы. Они большие, тяжёлые и бестолковые. Только керамические. Но зато много!
В электронике помехи в основном высокочастотные, для них надо маленькие ёмкости, но малоиндуктивные.
Б.г.>> В результате, при 8-битном ШИМе у меня всего 19 положений на "нормальный" рабочий ход, и 29 на "расширенный" (от 0,7 мс до 2,3 мс).
Xan> В микроконтроллере же есть железный ШИМ.
Xan> Как правило, с очень мелким дискретом = 1/f_osc.
Xan> Я даже придумал способ увеличения числа каналов железного ШИМа, из трёх собирался делать 8. Путём двух микрух 78x08.
На самом деле можеш превратить любой порт в микроконтролере (8 или 16 бита) для одновременный ШИМа, если у тебе есть один свободной таймер в контролере и интервал между 0,7 мс до 2,3 мс будет разделен на шаги, в зависимости от минимального интервала таймера.
Xan> 2. Я давно не ставлю в электронику электролитические конденсаторы. Они большие, тяжёлые и бестолковые. Только керамические. Но зато много!
Они для сервомашинок.
Xan> В микроконтроллере же есть железный ШИМ.
Xan> Как правило, с очень мелким дискретом = 1/f_osc.
Xan> Я даже придумал способ увеличения числа каналов железного ШИМа, из трёх собирался делать 8. Путём двух микрух 78x08.
На самом деле можеш превратить любой порт в микроконтролере (8 или 16 бита) для одновременный ШИМа, если у тебе есть один свободной таймер в контролере и интервал между 0,7 мс до 2,3 мс будет разделен на шаги, в зависимости от минимального интервала таймера.
Xan> 2. Я давно не ставлю в электронику электролитические конденсаторы. Они большие, тяжёлые и бестолковые. Только керамические. Но зато много!
Они для сервомашинок.
Это сообщение редактировалось 01.06.2015 в 19:20
pinko> Как будеш устанавливать рулевые машинки?
В два этажа, чтоб меньше описанный диаметр был.
pinko> Другой вопрос - насколько быстро ты читаеш данные гироскопов?
У меня гироскоп с цифровым выходом, и я читаю каждый сэмпл. Правда, потом складываю их попарно - получается 409,6 в секунду.
pinko> Pinko
pinko> П.с. Я сделал круглая печатная плата и специальной рамы для моего устройства...
я - ещё нет. У меня пока всё в настольном исполнении.
В два этажа, чтоб меньше описанный диаметр был.
pinko> Другой вопрос - насколько быстро ты читаеш данные гироскопов?
У меня гироскоп с цифровым выходом, и я читаю каждый сэмпл. Правда, потом складываю их попарно - получается 409,6 в секунду.
pinko> Pinko
pinko> П.с. Я сделал круглая печатная плата и специальной рамы для моего устройства...
я - ещё нет. У меня пока всё в настольном исполнении.

pinko>> П.с. Я сделал круглая печатная плата
Xan> 1. Я очень давно решил, что платы должны располагаться вдоль оси. Ещё когда скважинные приборы делал.
Xan> Никаких круглых или пятиугольных!
Почему так категорично? Мне иногда думается, что круглые платы рациональнее.. Может применительно к калибру.. Но и потребное расположение датчиков накладывает свой отпечаток ..
Xan> 1. Я очень давно решил, что платы должны располагаться вдоль оси. Ещё когда скважинные приборы делал.
Xan> Никаких круглых или пятиугольных!
Почему так категорично? Мне иногда думается, что круглые платы рациональнее.. Может применительно к калибру.. Но и потребное расположение датчиков накладывает свой отпечаток ..

Xan> 1. Я очень давно решил, что платы должны располагаться вдоль оси. Ещё когда скважинные приборы делал.
Xan,
Я думаю что в этом случае круглая плат имеет некоторые преимущества. Датчик имеет 3 гироскопы для каждую ось и он прямо в центре плата, а она легко установлется симметрично от корпуса ракеты вдоль центральной z ось - так все 3 оси гироскопа будет центрировани с осями ракеты.
Если датчик не центрирован со всеми тремя осями, тогда думаю что надо пересчитывать данные или я ошибаюсь?
pinko
Xan,
Я думаю что в этом случае круглая плат имеет некоторые преимущества. Датчик имеет 3 гироскопы для каждую ось и он прямо в центре плата, а она легко установлется симметрично от корпуса ракеты вдоль центральной z ось - так все 3 оси гироскопа будет центрировани с осями ракеты.
Если датчик не центрирован со всеми тремя осями, тогда думаю что надо пересчитывать данные или я ошибаюсь?
pinko
Б.г.> Итак, пришлось осваивать "стандартные" рулевые машинки.
Почему эта? Есть дешевле, мощнее, быстрее и полностью металл

Почему эта? Есть дешевле, мощнее, быстрее и полностью металл
TGY-306G сверхскоростная цифровая сервомашинка с металлическим корпусом (3 кг / 0.06с / 21г) - Паркфлаер
Новости мира радиоуправляемых моделей. Магазин, в котором можно купить радиоуправляемые модели и комплектующие. // www.parkflyer.ru
pinko> так все 3 оси гироскопа будет центрировани с осями ракеты.
Только одна ось совпадает. Остальные не совпадают и до них вряд ли получится дотянуться, например, в моей ракете остальные две оси находятся внутри двигателя и при том ещё гуляют по длине корпуса ракеты очень сильно.
Только одна ось совпадает. Остальные не совпадают и до них вряд ли получится дотянуться, например, в моей ракете остальные две оси находятся внутри двигателя и при том ещё гуляют по длине корпуса ракеты очень сильно.
Б.г.>> Итак, пришлось осваивать "стандартные" рулевые машинки.
RocKI> Почему эта? Есть дешевле, мощнее, быстрее и полностью металл
RocKI> TGY-306G сверхскоростная цифровая сервомашинка с металлическим корпусом (3 кг / 0.06с / 21г) - Паркфлаер
Ну, насчёт дешевле - это преувеличение, в пилотаж RC цена завышена, просто эта ссылка первой попалась.
То, что были выбраны эти машинки, просто исторически сложилось.
RocKI> Почему эта? Есть дешевле, мощнее, быстрее и полностью металл
RocKI> TGY-306G сверхскоростная цифровая сервомашинка с металлическим корпусом (3 кг / 0.06с / 21г) - Паркфлаер
Ну, насчёт дешевле - это преувеличение, в пилотаж RC цена завышена, просто эта ссылка первой попалась.
То, что были выбраны эти машинки, просто исторически сложилось.
RocKI>> TGY-306G сверхскоростная цифровая сервомашинка с металлическим корпусом (3 кг / 0.06с / 21г) - Паркфлаер
Б.г.> Ну, насчёт дешевле - это преувеличение, в пилотаж RC цена завышена, просто эта ссылка первой попалась.
Б.г.> То, что были выбраны эти машинки, просто исторически сложилось.
Эта машинка классом выше, а одноклассники твоей на Паркфлаере и Хоббикинге вообще копейки стоят. Конечно, если они у тебя уже есть, то и разговора нет.
Б.г.> Ну, насчёт дешевле - это преувеличение, в пилотаж RC цена завышена, просто эта ссылка первой попалась.
Б.г.> То, что были выбраны эти машинки, просто исторически сложилось.
Эта машинка классом выше, а одноклассники твоей на Паркфлаере и Хоббикинге вообще копейки стоят. Конечно, если они у тебя уже есть, то и разговора нет.
pinko> Я думаю что в этом случае круглая плат имеет некоторые преимущества.
У некоторых мемсов ось z хуже, чем две другие.
А для горизонтальной платы ось z как раз окажется вдоль оси ракеты.
pinko> Если датчик не центрирован со всеми тремя осями, тогда думаю что надо пересчитывать данные или я ошибаюсь?
На самом деле оси датчиков не обязаны совпадать с осями ракеты — микроконтроллер вычисляет, куда летят датчики. И управляет так, чтоб датчики (не ракета) летели куда надо.
А так как ракета привязана к датчикам, то и она летит куда надо.
По этой же причине датчики не обязаны быть в центре масс ракеты.
Понятно, что для удобства управления рулевыми машинками, оси, за которые отвечают машинки, лучше сделать совпадающими с осями датчиков.
Это чуть меньше арифметики будет.
У некоторых мемсов ось z хуже, чем две другие.
А для горизонтальной платы ось z как раз окажется вдоль оси ракеты.
pinko> Если датчик не центрирован со всеми тремя осями, тогда думаю что надо пересчитывать данные или я ошибаюсь?
На самом деле оси датчиков не обязаны совпадать с осями ракеты — микроконтроллер вычисляет, куда летят датчики. И управляет так, чтоб датчики (не ракета) летели куда надо.
А так как ракета привязана к датчикам, то и она летит куда надо.
По этой же причине датчики не обязаны быть в центре масс ракеты.
Понятно, что для удобства управления рулевыми машинками, оси, за которые отвечают машинки, лучше сделать совпадающими с осями датчиков.
Это чуть меньше арифметики будет.
pinko> Если датчик не центрирован со всеми тремя осями, тогда думаю что надо пересчитывать данные или я ошибаюсь?
Блин, я наверно ничего не понимаю, но ведь речь идет об осях вращения и датчики реагируют на угловое отклонение? Тогда какая разница где они находятся? Наверно важнее их ориентация в пространстве.
Блин, я наверно ничего не понимаю, но ведь речь идет об осях вращения и датчики реагируют на угловое отклонение? Тогда какая разница где они находятся? Наверно важнее их ориентация в пространстве.
Б.г.>> В результате, при 8-битном ШИМе у меня всего 19 положений на "нормальный" рабочий ход, и 29 на "расширенный" (от 0,7 мс до 2,3 мс).
Xan> В микроконтроллере же есть железный ШИМ.
Есть-то он есть, "но хто ж ему дасть?".
Xan> Как правило, с очень мелким дискретом = 1/f_osc.
если счётчик 8-разрядный, то у ШИМ 256 возможных состояний. Если 16-разрядный - то 65536. У АВР есть удобный 10-битный режим, им я чаще всего и пользовался, но занимается при этом весь 16-разрядный счётчик.
Суть проблемы в том, что для рулевой машинки длина импульса от 1 до 2 миллисекунд, а период повторения импульсов - 20 миллисекунд, т.е. скважность может изменяться от 5% до 10%, не больше и не меньше.
И при 256 тактах на период рабочими оказываются только значения от 13 до 25. Реально, большинство машинок понимают от 11 до 27.
Xan> В микроконтроллере же есть железный ШИМ.
Есть-то он есть, "но хто ж ему дасть?".
Xan> Как правило, с очень мелким дискретом = 1/f_osc.
если счётчик 8-разрядный, то у ШИМ 256 возможных состояний. Если 16-разрядный - то 65536. У АВР есть удобный 10-битный режим, им я чаще всего и пользовался, но занимается при этом весь 16-разрядный счётчик.
Суть проблемы в том, что для рулевой машинки длина импульса от 1 до 2 миллисекунд, а период повторения импульсов - 20 миллисекунд, т.е. скважность может изменяться от 5% до 10%, не больше и не меньше.
И при 256 тактах на период рабочими оказываются только значения от 13 до 25. Реально, большинство машинок понимают от 11 до 27.
Б.г.> Суть проблемы в том, что для рулевой машинки длина импульса от 1 до 2 миллисекунд, а период повторения импульсов - 20 миллисекунд, т.е. скважность может изменяться от 5% до 10%, не больше и не меньше.
Предельные значения, про которые читал, такие:
1.5 ± 0.7 = 0.8 ... 1.5 ... 2.2 мс
Частота повторения 50 ... 140 Гц.
Работает не скважность, а длительность импульса. А частота повторения может плавать как угодно.
Поэтому у меня в планах было такое:
Гиры дают инфу с частотой 400 Гц, она обсчитывается и получаются управляющие значения для машинок.
Стоит программный делитель на 3, который с периодом повторения 400 / 3 = 133 Гц и с помощью микросхем 2И (7408) переключает/размножает 3 шима на 9 каналов.
То есть, каждый железный шим обслуживает три канала.
Длительность подключенности к одному каналу равна 1 / 400 = 2.5 мс, так что самый длинный импульс (2.2 мс) в это время умещается.
Единственная мелкая неприятность — надо рулить переключателем. Но это мелочь.
Предельные значения, про которые читал, такие:
1.5 ± 0.7 = 0.8 ... 1.5 ... 2.2 мс
Частота повторения 50 ... 140 Гц.
Работает не скважность, а длительность импульса. А частота повторения может плавать как угодно.
Поэтому у меня в планах было такое:
Гиры дают инфу с частотой 400 Гц, она обсчитывается и получаются управляющие значения для машинок.
Стоит программный делитель на 3, который с периодом повторения 400 / 3 = 133 Гц и с помощью микросхем 2И (7408) переключает/размножает 3 шима на 9 каналов.
То есть, каждый железный шим обслуживает три канала.
Длительность подключенности к одному каналу равна 1 / 400 = 2.5 мс, так что самый длинный импульс (2.2 мс) в это время умещается.
Единственная мелкая неприятность — надо рулить переключателем. Но это мелочь.
Б.г.> Суть проблемы в том, что для рулевой машинки длина импульса от 1 до 2 миллисекунд, а период повторения импульсов - 20 миллисекунд, т.е. скважность может изменяться от 5% до 10%, не больше и не меньше.
Б.г.> И при 256 тактах на период рабочими оказываются только значения от 13 до 25. Реально, большинство машинок понимают от 11 до 27.
Я этого не понимаю - почему 5-10%? Программное ШИМ работает так:
- Изменит состояние контактый
- Настройка и запуск таймер
- Таймер генерирует прерывание
- Изменит состояние контактый
Так длительность импульса может быть изменен с шагом один системным тактовым сигналом.
Б.г.> И при 256 тактах на период рабочими оказываются только значения от 13 до 25. Реально, большинство машинок понимают от 11 до 27.
Я этого не понимаю - почему 5-10%? Программное ШИМ работает так:
- Изменит состояние контактый
- Настройка и запуск таймер
- Таймер генерирует прерывание
- Изменит состояние контактый
Так длительность импульса может быть изменен с шагом один системным тактовым сигналом.
Xan> Предельные значения, про которые читал, такие:
Xan> 1.5 ± 0.7 = 0.8 ... 1.5 ... 2.2 мс
Всё, что меньше 1 мс и больше 2 мс, не гарантируется, это "добрая воля" производителей сервомашинок. Обычно, да, от 0,8 до 2,2 мс всё работает.
Xan> Частота повторения 50 ... 140 Гц.
Xan> Работает не скважность, а длительность импульса.
Да, это я знаю. У меня сейчас около 70 Гц. Но, опять же, стандартом является 50 Гц, а всё, что больше - продукт конкуренции, и обговаривается в паспорте каждой рулевой машинки.
Xan> А частота повторения может плавать как угодно.
Не совсем так. Не плавать, как угодно, а выбираться из этого диапазона, как угодно. Периоды повторения соседних импульсов не могут сильно отличаться, многие машинки от этого глючат (некоторые даже переходят в режим программирования).
Xan> То есть, каждый железный шим обслуживает три канала.
Xan> Длительность подключенности к одному каналу равна 1 / 400 = 2.5 мс, так что самый длинный импульс (2.2 мс) в это время умещается.
Xan> Единственная мелкая неприятность — надо рулить переключателем. Но это мелочь.
Собственно, так оно и работало изначально, ШИМ импульсы передавались передатчиком по очереди, сначала 1й канал, потом второй, и т.д, а после восьмого - пауза. Чтобы дешифратор в приёмнике её поймал и понял, что это - нулевой канал. 8 каналов были фактическим стандартом в аналоговые времена. Именно поэтому максимальная длительность импульса примерно в 9 раз меньше стандартного периода повтора.
Xan> 1.5 ± 0.7 = 0.8 ... 1.5 ... 2.2 мс
Всё, что меньше 1 мс и больше 2 мс, не гарантируется, это "добрая воля" производителей сервомашинок. Обычно, да, от 0,8 до 2,2 мс всё работает.
Xan> Частота повторения 50 ... 140 Гц.
Xan> Работает не скважность, а длительность импульса.
Да, это я знаю. У меня сейчас около 70 Гц. Но, опять же, стандартом является 50 Гц, а всё, что больше - продукт конкуренции, и обговаривается в паспорте каждой рулевой машинки.
Xan> А частота повторения может плавать как угодно.
Не совсем так. Не плавать, как угодно, а выбираться из этого диапазона, как угодно. Периоды повторения соседних импульсов не могут сильно отличаться, многие машинки от этого глючат (некоторые даже переходят в режим программирования).
Xan> То есть, каждый железный шим обслуживает три канала.
Xan> Длительность подключенности к одному каналу равна 1 / 400 = 2.5 мс, так что самый длинный импульс (2.2 мс) в это время умещается.
Xan> Единственная мелкая неприятность — надо рулить переключателем. Но это мелочь.
Собственно, так оно и работало изначально, ШИМ импульсы передавались передатчиком по очереди, сначала 1й канал, потом второй, и т.д, а после восьмого - пауза. Чтобы дешифратор в приёмнике её поймал и понял, что это - нулевой канал. 8 каналов были фактическим стандартом в аналоговые времена. Именно поэтому максимальная длительность импульса примерно в 9 раз меньше стандартного периода повтора.

fortekom
втянувшийся
Я извиняюсь за глупый вопрос.
А в ПТУРсе тоже серво машинки?
П.С. Когда в армии, 25 лет назад, стрелял из ПТУРса, то помню как после нажатия курка включалась "турбина", а потом уже выстрел.
Это сейчас я понимаю, что "турбина", это гироскоп (наверное)
А принцип механического управления я не знаю (только электронное знаю, по двум проводам)
А в ПТУРсе тоже серво машинки?
П.С. Когда в армии, 25 лет назад, стрелял из ПТУРса, то помню как после нажатия курка включалась "турбина", а потом уже выстрел.
Это сейчас я понимаю, что "турбина", это гироскоп (наверное)
А принцип механического управления я не знаю (только электронное знаю, по двум проводам)
Б.г.>> И при 256 тактах на период рабочими оказываются только значения от 13 до 25. Реально, большинство машинок понимают от 11 до 27.
pinko> Я этого не понимаю - почему 5-10%?
Для того, чтобы требовалось меньше внимания процессора, т.е., если не требуется поворачивать руль, то и не надо ничего писать ни в какие регистры, используется аппаратный PWM, состоящий из счётчика и регистра. В регистр записывается число для сравнения, пока в счётчике меньше, чем это число, на выходе "1", если больше - на выходе "0". Период повторения задаётся переполнением счётчика. Чтобы этот период попадал в диапазон, поддерживаемый рулевыми машинками, приходится на вход 8-разрядного счётчика подавать тактовую частоту, делённую на 1024. При кварце 18,432 МГц получается, что период повторения 14,2 мс (частота 70,3 Гц). Это машинка нормально понимает. Но длине импульса 1 мс соответствует число для сравнения 18, а 2 мс - 36. Из диапазона от 0 до 255 я могу использовать только от 18 до 36.
pinko> Я этого не понимаю - почему 5-10%?
Для того, чтобы требовалось меньше внимания процессора, т.е., если не требуется поворачивать руль, то и не надо ничего писать ни в какие регистры, используется аппаратный PWM, состоящий из счётчика и регистра. В регистр записывается число для сравнения, пока в счётчике меньше, чем это число, на выходе "1", если больше - на выходе "0". Период повторения задаётся переполнением счётчика. Чтобы этот период попадал в диапазон, поддерживаемый рулевыми машинками, приходится на вход 8-разрядного счётчика подавать тактовую частоту, делённую на 1024. При кварце 18,432 МГц получается, что период повторения 14,2 мс (частота 70,3 Гц). Это машинка нормально понимает. Но длине импульса 1 мс соответствует число для сравнения 18, а 2 мс - 36. Из диапазона от 0 до 255 я могу использовать только от 18 до 36.
fortekom> Я извиняюсь за глупый вопрос.
fortekom> А в ПТУРсе тоже серво машинки?
Нет, там руль имеет всего 2 положения, причём, он обычно один, а работает по рысканию или тангажу, в зависимости от того, как повёрнут ПТУРС во время движения. А ПТУРС крутится вокруг продольной оси с довольно большой скоростью.
И руль щёлкает туда-сюда с довольно большой частотой, получается усреднение по времени, незаметное для оператора.
fortekom> А в ПТУРсе тоже серво машинки?
Нет, там руль имеет всего 2 положения, причём, он обычно один, а работает по рысканию или тангажу, в зависимости от того, как повёрнут ПТУРС во время движения. А ПТУРС крутится вокруг продольной оси с довольно большой скоростью.
И руль щёлкает туда-сюда с довольно большой частотой, получается усреднение по времени, незаметное для оператора.
Реклама Google — средство выживания форумов :)

Б.г.> Для того, чтобы требовалось меньше внимания процессора, т.е., если не требуется поворачивать руль, то и не надо ничего писать ни в какие регистры, используется аппаратный PWM, состоящий из счётчика и регистра.
А что мешает использовать программный ШИМ? Лишнего времени это будет занимать мизер. Правда, потребуется 16-разрядный счетчик.
P.S.: Хотя, нет, даже и не потребуется.
А что мешает использовать программный ШИМ? Лишнего времени это будет занимать мизер. Правда, потребуется 16-разрядный счетчик.
P.S.: Хотя, нет, даже и не потребуется.
Это сообщение редактировалось 05.06.2015 в 12:00
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
