-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Xan
Xan

SashaMaks> О, я так и думал
Ты до сих пор не извинился.
Писанина твоя мне не интересна.
Ты до сих пор не извинился.
Писанина твоя мне не интересна.

 инфо
инфо инструменты
инструменты
Massaraksh> Ну, я заодно и пытаюсь понять алгоритм определения текущей координаты объекта в зависимости от показаний "полноценной системы инерциальных датчиков".
У меня почти написана прога для МК.
Полностью написано получение направляющих косинусов из данных гироскопов.
На стр. 13 этой темы есть намёки.
Я всё считаю в абсолютной системе координат с центром в центре Земли (Земля = пуп Вселенной).
Система не вращается с Землёй, ось Z направлена на северный полюс, X — на весеннее равноденствие, Y — на 90 градусов от X, знак не помню.
Вот ракета стоит на старте — на расстоянии 6 тысяч км от начала координат, а её оси наклонены под большими углами к осям системы, и она движется со скоростью 400 м/с вместе с поверхностью Земли.
Для определения ориентации ракеты я не использую углы, а использую направляющие косинусы.
(см. например: Направляющие косинусы вектора.)
Это позволяет не нагружать МК вычислениями тригонометрических функций.
Направление каждой из трёх осей ракеты задаётся тремя косинусами.
Итого, получается 9 величин.
Это, вообще-то, сильно избыточно. Но зато есть удобство.
Из показаний гироскопов я как раз получаю изменение этих 9 косинусов (cosX_x и другие восемь).
Чтоб получить ускорение в абсолютной системе, я беру показания акселерометра x и умножаю на три косинуса оси x. И получаю "кусочки" компонентов ускорения в абсолютной системе:
aX_x = ax * cosX_x
aY_x = ax * cosY_x
aZ_x = ax * cosZ_x
Аналогично для акселорометров y и z: aX_y, aY_y, aZ_y, aX_z, aY_z, aZ_z.
Складываю "кусочки" и получаю компоненты ускорения в абсолютной системе (с учётом поля тяжести, конечно):
aX = aX_x + aX_y + aX_z - gX
aY = aY_x + aY_y + aY_z - gY
aZ = aZ_x + aZ_y + aZ_z - gZ
Девять умножений, девять сложений, никакой тригонометрии.
Дальше примитивное интегрирование в абсолютной системе:
вектор скорости: v = v + a * dt
вектор координат: r = r + v * dt
Всё.")
У меня почти написана прога для МК.
Полностью написано получение направляющих косинусов из данных гироскопов.
На стр. 13 этой темы есть намёки.
Я всё считаю в абсолютной системе координат с центром в центре Земли (Земля = пуп Вселенной).
Система не вращается с Землёй, ось Z направлена на северный полюс, X — на весеннее равноденствие, Y — на 90 градусов от X, знак не помню.
Вот ракета стоит на старте — на расстоянии 6 тысяч км от начала координат, а её оси наклонены под большими углами к осям системы, и она движется со скоростью 400 м/с вместе с поверхностью Земли.
Для определения ориентации ракеты я не использую углы, а использую направляющие косинусы.
(см. например: Направляющие косинусы вектора.)
Это позволяет не нагружать МК вычислениями тригонометрических функций.
Направление каждой из трёх осей ракеты задаётся тремя косинусами.
Итого, получается 9 величин.
Это, вообще-то, сильно избыточно. Но зато есть удобство.
Из показаний гироскопов я как раз получаю изменение этих 9 косинусов (cosX_x и другие восемь).
Чтоб получить ускорение в абсолютной системе, я беру показания акселерометра x и умножаю на три косинуса оси x. И получаю "кусочки" компонентов ускорения в абсолютной системе:
aX_x = ax * cosX_x
aY_x = ax * cosY_x
aZ_x = ax * cosZ_x
Аналогично для акселорометров y и z: aX_y, aY_y, aZ_y, aX_z, aY_z, aZ_z.
Складываю "кусочки" и получаю компоненты ускорения в абсолютной системе (с учётом поля тяжести, конечно):
aX = aX_x + aX_y + aX_z - gX
aY = aY_x + aY_y + aY_z - gY
aZ = aZ_x + aZ_y + aZ_z - gZ
Девять умножений, девять сложений, никакой тригонометрии.
Дальше примитивное интегрирование в абсолютной системе:
вектор скорости: v = v + a * dt
вектор координат: r = r + v * dt
Всё.
 Massaraksh
Massaraksh

Xan>...
Спасибо, попробую построить модель.
Спасибо, попробую построить модель.



Xan> Несколько раз уже читал про "датчики в центре масс".
Xan> И все эти несколько раз не могу понять — зачем?!
Для облегчения жизни, в смысле, математики, при нежёсткой ракете и неидеальных датчиках.
Xan> Ну вот к ракете приделана палка вбок, на конце палки — датчики.
Xan> Ракета вращается вокруг оси и вообще летит криво.
ну представь, что акселерометр бокового ускорения имеет очень маленький гистерезис, т.е. его показания при смене знака ускорения чуть-чуть зависят от предыдущих показаний. А это реалистичная картина.
Xan> Как всё это помешает определить положение датчиков?
Xan> Причём здесь центр масс?
Если, допустим, мы не знаем точно частоту собственных колебаний ракеты, как упругого стержня (а у жидкостной ракеты она меняется по мере выработки топлива), а датчик стоит далеко от центра масс, мы не сможем вычленить собственные колебания ракеты и автоколебания, создаваемые системой управления.
Xan> И все эти несколько раз не могу понять — зачем?!
Для облегчения жизни, в смысле, математики, при нежёсткой ракете и неидеальных датчиках.
Xan> Ну вот к ракете приделана палка вбок, на конце палки — датчики.
Xan> Ракета вращается вокруг оси и вообще летит криво.
ну представь, что акселерометр бокового ускорения имеет очень маленький гистерезис, т.е. его показания при смене знака ускорения чуть-чуть зависят от предыдущих показаний. А это реалистичная картина.
Xan> Как всё это помешает определить положение датчиков?
Xan> Причём здесь центр масс?
Если, допустим, мы не знаем точно частоту собственных колебаний ракеты, как упругого стержня (а у жидкостной ракеты она меняется по мере выработки топлива), а датчик стоит далеко от центра масс, мы не сможем вычленить собственные колебания ракеты и автоколебания, создаваемые системой управления.

Xan> Всё.
Построил модель, на плоскости твои формулы, вроде бы, работают. Теперь хочу проверить на реальном приборе.
Вопрос тебе: гироскоп выдает направляющие косинусы?
И вопрос тебе и Андрею: какой чип посоветуете купить (3-осевой гироскоп + 3-осевой акселерометр) для этих целей, но без фанатизма (очень большая точность мне не нужна)?
Построил модель, на плоскости твои формулы, вроде бы, работают. Теперь хочу проверить на реальном приборе.
Вопрос тебе: гироскоп выдает направляющие косинусы?
И вопрос тебе и Андрею: какой чип посоветуете купить (3-осевой гироскоп + 3-осевой акселерометр) для этих целей, но без фанатизма (очень большая точность мне не нужна)?
Massaraksh> Вопрос тебе: гироскоп выдает направляющие косинусы?
Нет, только угловые скорости, причём, вокруг ТЕКУЩИХ осей. Надо интегрировать.
Massaraksh> И вопрос тебе и Андрею: какой чип посоветуете купить (3-осевой гироскоп + 3-осевой акселерометр) для этих целей, но без фанатизма (очень большая точность мне не нужна)?
Что-нибудь типа этого:

Там до кучи и магнитометр и барометр стоят.
Нет, только угловые скорости, причём, вокруг ТЕКУЩИХ осей. Надо интегрировать.
Massaraksh> И вопрос тебе и Андрею: какой чип посоветуете купить (3-осевой гироскоп + 3-осевой акселерометр) для этих целей, но без фанатизма (очень большая точность мне не нужна)?
Что-нибудь типа этого:
GY 86 10DOF MS5611 HMC5883L MPU6050 Sensor module MWC-in Sensors from Electronic Components & Supplies on Aliexpress.com | Alibaba Group
Cheap mwc lighting, Buy Directly from China Suppliers: GY-86 10DOF MS5611 HMC5883L MPU6050 Sensor module MWC Feature 10DOF modules (three-axis gyrosco // www.aliexpress.comТам до кучи и магнитометр и барометр стоят.
Massaraksh> Вопрос тебе: гироскоп выдает направляющие косинусы?
Решил причесать текст и дополнить интегрированием скорости и координат.
И комментариев понавставлял. А то склероз так и нападает!
Пока получился черновик, не пропущенный через компилятор и железо.
Так что ошибки там могут быть самые разные.
Но подумал, что лучше раньше показать, а то наладка может отложиться в долгий ящик.
(https://dl.dropboxusercontent.com/u/.../Inertial_math_2015.06.20.txt)
Там ещё гравитация эллиптической Земли не вставлена.
Думал насчёт точности, какую надо применить в этой арифметике.
Ну, чтоб облегчить жизнь для МК.
Получилось, что вращение не имеет смысла считать точнее, чем float.
А вот для космических скоростей и координат точности float сильно не хватает.
Пытался всяко применить числа с фиксированной точкой, у них мантисса длиннее, чем у плавающих. Но всё равно мало и надо извращаться, чтоб over/under-flow не случилось.
Решил, что ресурсы человеческого разума надо беречь, а лучше МК надо заставить считать double. Ему всё равно в полёте, когда он из рук хозяина вырвется, делать будет нечего!
Решил причесать текст и дополнить интегрированием скорости и координат.
И комментариев понавставлял. А то склероз так и нападает!
Пока получился черновик, не пропущенный через компилятор и железо.
Так что ошибки там могут быть самые разные.
Но подумал, что лучше раньше показать, а то наладка может отложиться в долгий ящик.
(https://dl.dropboxusercontent.com/u/.../Inertial_math_2015.06.20.txt)
Там ещё гравитация эллиптической Земли не вставлена.
Думал насчёт точности, какую надо применить в этой арифметике.
Ну, чтоб облегчить жизнь для МК.
Получилось, что вращение не имеет смысла считать точнее, чем float.
А вот для космических скоростей и координат точности float сильно не хватает.
Пытался всяко применить числа с фиксированной точкой, у них мантисса длиннее, чем у плавающих. Но всё равно мало и надо извращаться, чтоб over/under-flow не случилось.
Решил, что ресурсы человеческого разума надо беречь, а лучше МК надо заставить считать double. Ему всё равно в полёте, когда он из рук хозяина вырвется, делать будет нечего!
Xan> Решил причесать текст и дополнить интегрированием скорости и координат.
Трапециями или Симпсоном будет точнее, чем прямоугольниками. Мне кажется, здесь это достаточно критично. Хотя, конечно, это надо проверять на реальных примерах.
code text
- VX += AX * dt; X += VX * dt; // Интегрируем вектор скорости
- VY += AY * dt; Y += VY * dt; // и координат.
- VZ += AZ * dt; Z += VZ * dt;
Трапециями или Симпсоном будет точнее, чем прямоугольниками. Мне кажется, здесь это достаточно критично. Хотя, конечно, это надо проверять на реальных примерах.
Massaraksh> Трапециями или Симпсоном будет точнее, чем прямоугольниками.
Ну, основа для размышлений должна быть простая и понятная.
А потом уже можно совершенствовать.
Ну, основа для размышлений должна быть простая и понятная.
А потом уже можно совершенствовать.
Massaraksh> Трапециями или Симпсоном будет точнее, чем прямоугольниками.
Не знаю, как насчёт координат, а для углов я прикинул.
Разница между методом прямоугольников и трапеций тем больше, чем быстрее меняется подынтегральная функция.
У меня в тестовой программе разворот по тангажу занимает 180 секунд.
Для периода в 1/409,6 секунды и величиной кванта угловой скорости 1/160 градуса в секунду разница между прямоугольниками и трапециями за всё время разворота составит не более 0,56 градуса. При том, что сам датчик за эти 180 секунд уйдёт градуса на полтора.
Не знаю, как насчёт координат, а для углов я прикинул.
Разница между методом прямоугольников и трапеций тем больше, чем быстрее меняется подынтегральная функция.
У меня в тестовой программе разворот по тангажу занимает 180 секунд.
Для периода в 1/409,6 секунды и величиной кванта угловой скорости 1/160 градуса в секунду разница между прямоугольниками и трапециями за всё время разворота составит не более 0,56 градуса. При том, что сам датчик за эти 180 секунд уйдёт градуса на полтора.
Текст пропустил через компилятор в железо.
Исправил старые ошибки, добавил новые!!!
По старой ссылке теперь лежит обновлённый файл:
(https://dl.dropboxusercontent.com/u/.../Inertial_math_2015.06.20.txt)
Результаты проверки быстродействия на железе:
Все переменные float — 238 вычислений в секунду
Скорость и координаты double — 194 — в 1.23 раза тормозит
Все переменные double — 120 — а это в два раза, но это и не интересно
Это при генераторе 12.8 МГц и специально заторможенном студенческом (free) компиляторе XC16(v1.11).
Total program memory used (bytes): 0x1761 (5985) 18%
Total data memory used (bytes): 0x12a (298) 14%
Можно частоту поднять до 32 МГц и компилятор применить сорта "про".
Частоту менять не хочется, к ней UART привязан. А генератор уже куплен.
Придётся включать "про" в компиляторе.
И, наверное, тормозить датчики с 400 до 200 отсчётов в секунду. Или даже до 100.
Исправил старые ошибки, добавил новые!!!
По старой ссылке теперь лежит обновлённый файл:
(https://dl.dropboxusercontent.com/u/.../Inertial_math_2015.06.20.txt)
Результаты проверки быстродействия на железе:
Все переменные float — 238 вычислений в секунду
Скорость и координаты double — 194 — в 1.23 раза тормозит
Все переменные double — 120 — а это в два раза, но это и не интересно
Это при генераторе 12.8 МГц и специально заторможенном студенческом (free) компиляторе XC16(v1.11).
Total program memory used (bytes): 0x1761 (5985) 18%
Total data memory used (bytes): 0x12a (298) 14%
Можно частоту поднять до 32 МГц и компилятор применить сорта "про".
Частоту менять не хочется, к ней UART привязан. А генератор уже куплен.
Придётся включать "про" в компиляторе.
И, наверное, тормозить датчики с 400 до 200 отсчётов в секунду. Или даже до 100.
Б.г.> Разница между методом прямоугольников и трапеций тем больше, чем быстрее меняется подынтегральная функция.
Б.г.> У меня в тестовой программе разворот по тангажу занимает 180 секунд.
Понятно. Но я пытаюсь в общем случае. К тому же, бывают нештатные ситуации.
Б.г.> У меня в тестовой программе разворот по тангажу занимает 180 секунд.
Понятно. Но я пытаюсь в общем случае. К тому же, бывают нештатные ситуации.

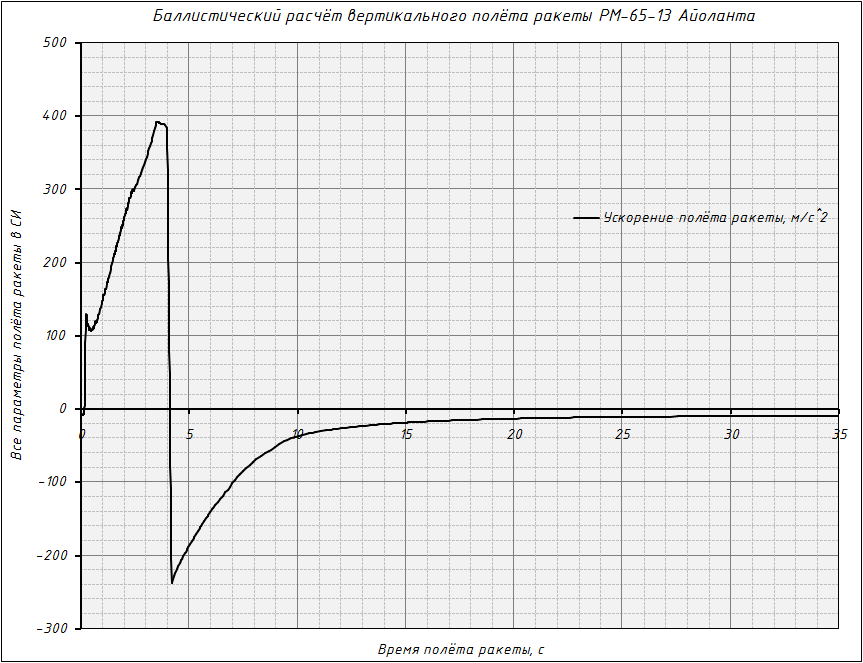
Massaraksh> Можешь нарисовать предполагаемый график показаний датчика ускорения на твоей виртуальной ракете?
Вот примерно такой и будет кривая ускорений с акселерометра по главной оси:
Вот примерно такой и будет кривая ускорений с акселерометра по главной оси:
Прикреплённые файлы:

Xan> Ты до сих пор не извинился.
Для меня алогично извиняться перед человеком, который меня обвиняет и оскорбляет в несуществующих грехах вот уже 2,5 года.
Xan> Писанина твоя мне не интересна.
Писанина пока что у тебя тут, а у меня дело, за которым стоит практика и действительность.
У тебя даже код в программе не проверен на работоспособность в теории...
Для меня алогично извиняться перед человеком, который меня обвиняет и оскорбляет в несуществующих грехах вот уже 2,5 года.
Xan> Писанина твоя мне не интересна.
Писанина пока что у тебя тут, а у меня дело, за которым стоит практика и действительность.
У тебя даже код в программе не проверен на работоспособность в теории...
Xan>> Всё.
Massaraksh> Построил модель, на плоскости твои формулы, вроде бы, работают. Теперь хочу проверить на реальном приборе.
Это:
Xan: "aX_x = ax * cosX_x"
Xan: "aY_x = ax * cosY_x"
Xan: "aZ_x = ax * cosZ_x"
Xan: "aX = aX_x + aX_y + aX_z - gX"
Xan: "aY = aY_x + aY_y + aY_z - gY"
Xan: "aZ = aZ_x + aZ_y + aZ_z - gZ"
Не относится к любым объектам. И по математической сути вообще неправильно. Но, возможно, что в этом мире самодельной математики, свои условия на ошибки. Возможно это взаимосвязано, и поэтому так к ним щепетильно относятся, но я в это не вникал.
Massaraksh> Построил модель, на плоскости твои формулы, вроде бы, работают. Теперь хочу проверить на реальном приборе.
Это:
Xan: "aX_x = ax * cosX_x"
Xan: "aY_x = ax * cosY_x"
Xan: "aZ_x = ax * cosZ_x"
Xan: "aX = aX_x + aX_y + aX_z - gX"
Xan: "aY = aY_x + aY_y + aY_z - gY"
Xan: "aZ = aZ_x + aZ_y + aZ_z - gZ"
Не относится к любым объектам. И по математической сути вообще неправильно. Но, возможно, что в этом мире самодельной математики, свои условия на ошибки. Возможно это взаимосвязано, и поэтому так к ним щепетильно относятся, но я в это не вникал.
Xan> И, наверное, тормозить датчики с 400 до 200 отсчётов в секунду. Или даже до 100.
Печально.
А я помню твой алгоритм и тоже его прогнал на скорость в сравнении со своим универсальным. Быстрей он оказался всего лишь в 1,5 раза. А всё потому, что в универсальном (правильном) преобразовании координат очень хорошо оптимизируются уравнения с косинусами и синусами
Печально.
А я помню твой алгоритм и тоже его прогнал на скорость в сравнении со своим универсальным. Быстрей он оказался всего лишь в 1,5 раза. А всё потому, что в универсальном (правильном) преобразовании координат очень хорошо оптимизируются уравнения с косинусами и синусами
SashaMaks> Для меня алогично извиняться
Лечись и извиняйся.
(Что-то я погорячился несколько.)
Лечись и извиняйся.
(Что-то я погорячился несколько.)
Это сообщение редактировалось 21.06.2015 в 17:43
SashaMaks> Вот примерно такой и будет кривая ускорений с акселерометра по главной оси:
И в какой точке апогей?
И в какой точке апогей?
Xan> (Что-то я погорячился несколько.)
Немножко да.
Немножко да.
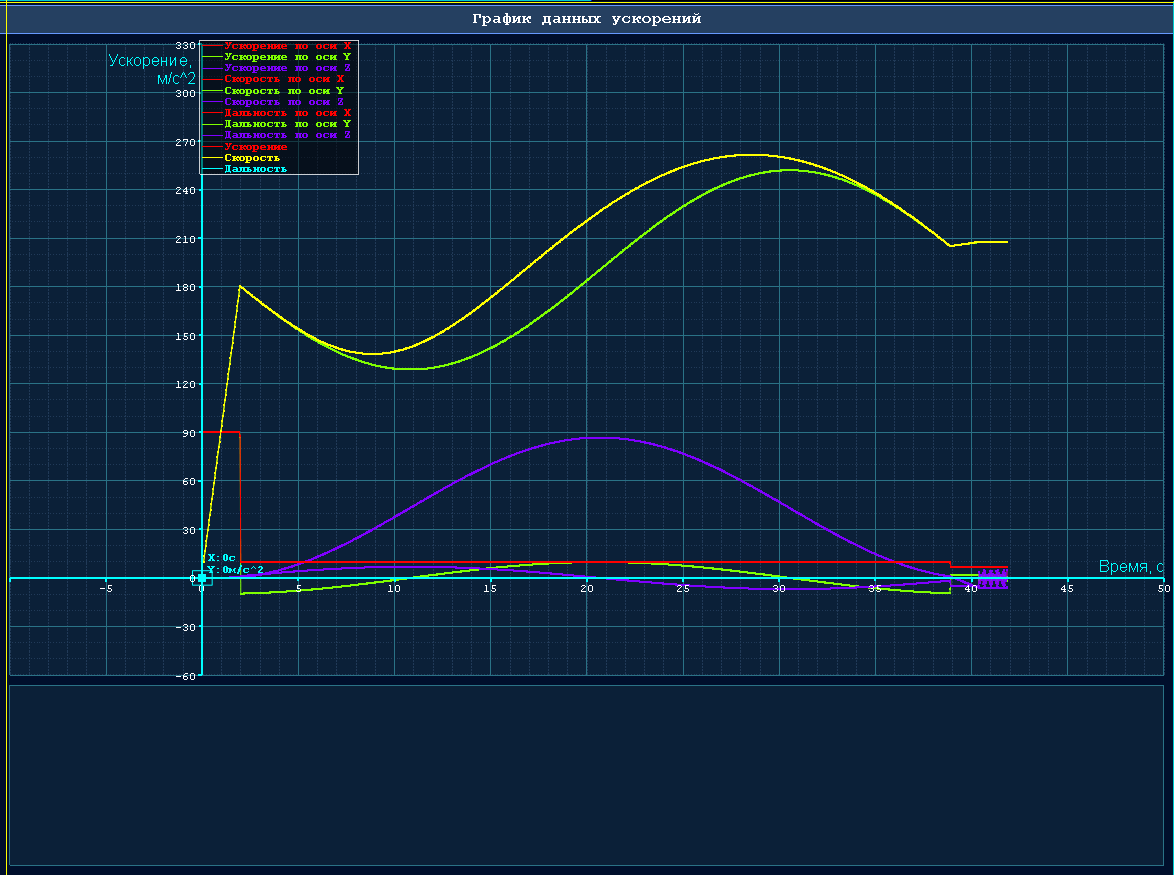
Massaraksh> И в какой точке апогей?
Так это:
SashaMaks: "4. Основным и достаточным условием определения момента прохождения ракетой апогея является минимум скорости её движения..."
Вот график уже из 3-х мерного симулятора, где имитируются данные с датчиков. Но тут ракета другая, менее мощная, а минимум скорости всё равно есть.
Так это:
SashaMaks: "4. Основным и достаточным условием определения момента прохождения ракетой апогея является минимум скорости её движения..."
Вот график уже из 3-х мерного симулятора, где имитируются данные с датчиков. Но тут ракета другая, менее мощная, а минимум скорости всё равно есть.
Прикреплённые файлы:
SashaMaks>> Для меня алогично извиняться
Xan> Лечись и извиняйся.
Может ещё и диагноз мне озвучишь? А то я что-то не понял к какому мне доктору обратиться и с чем...
Xan> Лечись и извиняйся.
Может ещё и диагноз мне озвучишь? А то я что-то не понял к какому мне доктору обратиться и с чем...
Massaraksh>> И в какой точке апогей?
SashaMaks> Так это:
Ты пальцем в график ткни.
SashaMaks> Так это:
Ты пальцем в график ткни.
Massaraksh> Ты пальцем в график ткни.
Прикреплённые файлы:

Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
