-
![[image]](https://www.balancer.ru/cache/sites/ru/le/lenta/icdn/images/2015/03/16/19/20150316195607852/128x128-crop/original_16016ebbb7145331d02b346734615718.jpg)
Продраться через атмосферу.
Теги:
 Massaraksh
Massaraksh

RLAN> Условно напротив этой нулевой точки (180) можно поставить стопор, который ограничит оборот, алгоритм заточить на пол оборота влево-вправо. Это упрощает реализацию аналогового энкодера, но может вносить задержку на перемещение через стопор.
Можно не стопор, а тот же датчик Холла. Или оптический датчик.
И, по-моему, лучше уж тогда шаговый двигатель.
Можно не стопор, а тот же датчик Холла. Или оптический датчик.
И, по-моему, лучше уж тогда шаговый двигатель.


Это сообщение редактировалось 04.04.2017 в 00:38
 инфо
инфо инструменты
инструменты
Massaraksh> Можно не стопор, а тот же датчик Холла. Или оптический датчик.
А что мешает напряжение на резисторе в стартовой позиции запомнить и эксцентрики туда повернуть.
Massaraksh> И, по-моему, лучше уж тогда шаговый двигатель.
Не, "сервак" с обратной связью точнее.
А что мешает напряжение на резисторе в стартовой позиции запомнить и эксцентрики туда повернуть.
Massaraksh> И, по-моему, лучше уж тогда шаговый двигатель.
Не, "сервак" с обратной связью точнее.


Б.г.> Альтернатива - самодельный синусно-косинусный трансформатор. Точность там получается более-менее приемлемая для самостоятельного изготовления. Соответственно, нужен синхронный детектор.
Погоди чутка. Малогабаритное моточное изделие — это всё же не просто так, это уметь надо и оборудование нужно.
Но можно лучше, ты тут навёл меня на мысль: можно взять два линейных датчика Холла крестом и магнитик на ось. И никакой синхронный детектор не нужен, сразу есть проекции на x и y. Только отнормировать вектор на единицу надо.
SS496E 130 рублей в розницу, диапазон -1000..1000 Гс, чувствительность 1,4 мВ/Гс, корпус 3,6 мм по наибольшему измерению, что ещё надо?
Погоди чутка. Малогабаритное моточное изделие — это всё же не просто так, это уметь надо и оборудование нужно.
Но можно лучше, ты тут навёл меня на мысль: можно взять два линейных датчика Холла крестом и магнитик на ось. И никакой синхронный детектор не нужен, сразу есть проекции на x и y. Только отнормировать вектор на единицу надо.
SS496E 130 рублей в розницу, диапазон -1000..1000 Гс, чувствительность 1,4 мВ/Гс, корпус 3,6 мм по наибольшему измерению, что ещё надо?

RLAN> Если исходно центр тяжести не смещен от оси, то эксцентрики должны стоять в противофазе, при этом мы их должны привязать к осям курса и тангажа. Значит они должны быть точно позиционированы, для каждого это нулевое состояние.
Ой-ё, попробую дешифровать эту криптограмму.
Имеется в виду, что есть сборка мотор-эксцентрик с осью, соответствующей оси ракеты. Так?
Таких сборки две, установлены лоб в лоб для уменьшения продольного плеча, так?
Предполагается задавать смещение ЦТ от оси изменением угла раскрыва "ножниц", а направление — биссектрисой. Так?
Ой-ё, попробую дешифровать эту криптограмму.
Имеется в виду, что есть сборка мотор-эксцентрик с осью, соответствующей оси ракеты. Так?
Таких сборки две, установлены лоб в лоб для уменьшения продольного плеча, так?
Предполагается задавать смещение ЦТ от оси изменением угла раскрыва "ножниц", а направление — биссектрисой. Так?
 RLAN
RLAN

Sandro> Предполагается задавать смещение ЦТ от оси изменением угла раскрыва "ножниц", а направление — биссектрисой. Так?
Пару страниц вверх эскиз рисовал. Да, так.
Пару страниц вверх эскиз рисовал. Да, так.

Sandro> Но можно лучше, ты тут навёл меня на мысль: можно взять два линейных датчика Холла крестом и магнитик на ось. И никакой синхронный детектор не нужен, сразу есть проекции на x и y. Только отнормировать вектор на единицу надо.
Схема извесная, в джойстиках широко применяется.
Смотрел на этот вариант.
Но пока не могу сообразить, полный ли оборот однозначно определяет такая схема.
30 часов за рулем, голова чугунная.
Схема извесная, в джойстиках широко применяется.
Смотрел на этот вариант.
Но пока не могу сообразить, полный ли оборот однозначно определяет такая схема.
30 часов за рулем, голова чугунная.
 pinko
pinko

RLAN> Пару страниц вверх эскиз рисовал. Да, так.
Двигатели с оптическими кодировщиками продаются дешевле в Ebay. Также можно найти только оптические колеса.



Двигатели с оптическими кодировщиками продаются дешевле в Ebay. Также можно найти только оптические колеса.
3PCS Robot Speed DZ186 Coded Disc Encoder 20 Holds Motor Speed Sensor | eBay
SouthAmerica and Africa. WestAsia/Middle East. 10 -15d. Australia/New Zealand. 10 -20d. France/West Asia. | eBay! // www.ebay.comDC 3V-12V 130 Servo Gear Motor 32-line AB Phase Encoder Code Disk Speed Motor | eBay
32-line AB Phase Encoder Code Disk Speed Motor. 130 servo motor with encoder, work great, the rear motor plastic cover are inlaid copper bearing liner, long-life copper brushes. DC 3V-12V 130 Servo Gear Motor. | eBay! // www.ebay.com1pc 385 DC 12V 3800 RPM Micro Motor Tacho Encoder Code Disk Speed For JOHSON | eBay
Speed: 3800 RPM. Motor Gear Dia.: 8.5 MM. Motor Gear Teeth No.: 14 Teeth. Current: 40mA. | eBay! // www.ebay.com
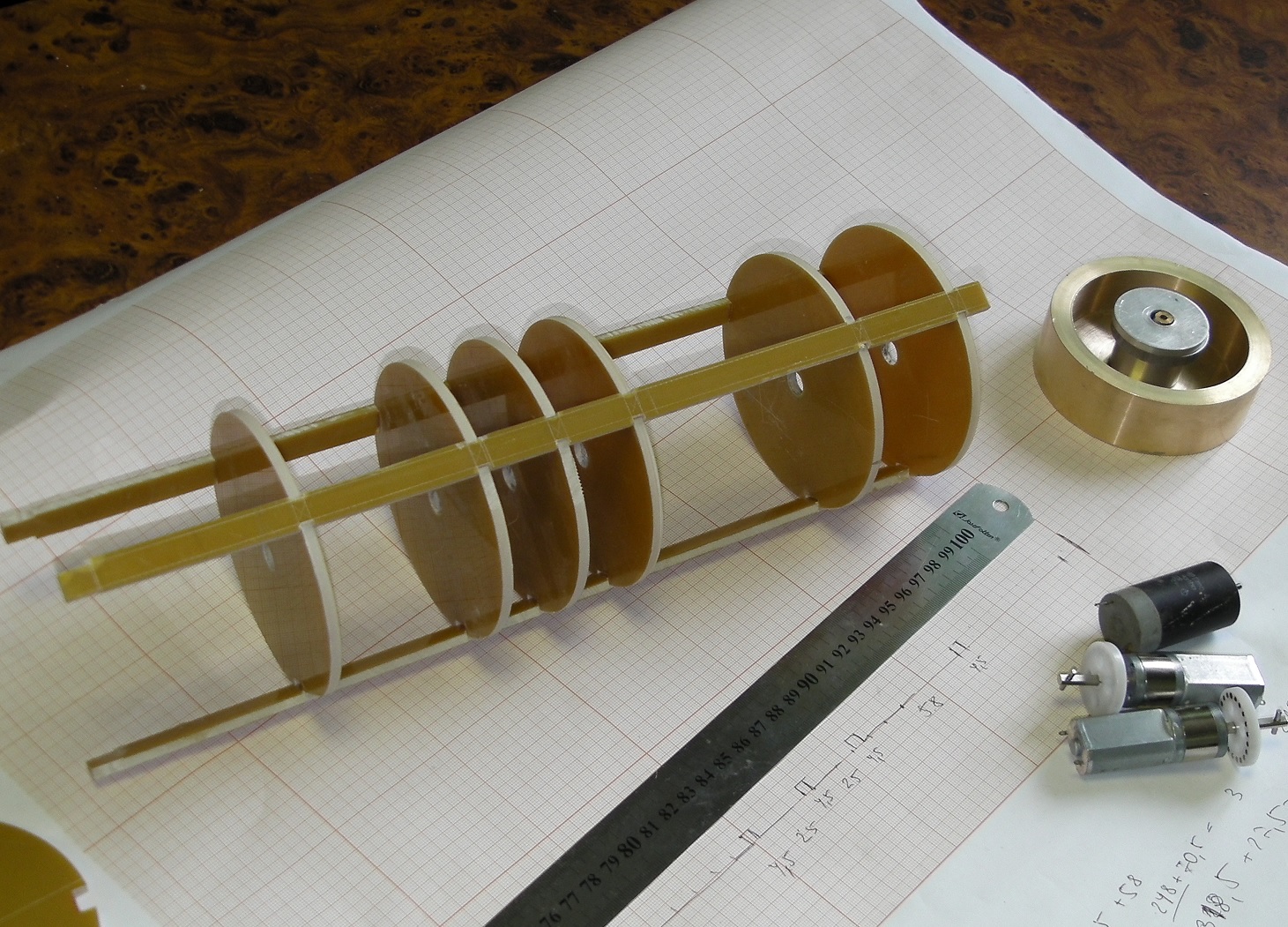
Сделал первый шаг постройки СВ (системы вертикализации ") )
)
Маховик управления по крену.
Вращающихся частей 930 г. Из них 630 - 10мм наружный пояс. Пока выбрал старый ГДРовский моторчик, имеет лучшие характеристики даже по сравнению с современными, от старого стриммера.
Суммарно механическая часть должна уложиться в 3 кг.
") )
)Маховик управления по крену.
Вращающихся частей 930 г. Из них 630 - 10мм наружный пояс. Пока выбрал старый ГДРовский моторчик, имеет лучшие характеристики даже по сравнению с современными, от старого стриммера.
Суммарно механическая часть должна уложиться в 3 кг.
Прикреплённые файлы:

Приходится торопиться, качество изделий не ахти, но должно работать.
Возник вопрос. Оптопары надо ставить с каким сдвигом? Четверть периода?
Кроме того реально маховиком можно скомпенсировать малые возмущения по крену, и не постоянные, то есть аэродинамику надо вылизывать.
Возник вопрос. Оптопары надо ставить с каким сдвигом? Четверть периода?
Кроме того реально маховиком можно скомпенсировать малые возмущения по крену, и не постоянные, то есть аэродинамику надо вылизывать.
Прикреплённые файлы:


RLAN> Оптопары надо ставить с каким сдвигом? Четверть периода?
Да, четверть периода.
RLAN> Кроме того реально маховиком можно скомпенсировать малые возмущения по крену, и не постоянные, то есть аэродинамику надо вылизывать.
По крену они обычно большими и не бывают.
Да, четверть периода.
RLAN> Кроме того реально маховиком можно скомпенсировать малые возмущения по крену, и не постоянные, то есть аэродинамику надо вылизывать.
По крену они обычно большими и не бывают.
 RLAN
RLAN
Собрал секцию с гиромотором для управления по крену.
Вроде ничего, на 3 с плюсом. Вибрация небольшая, даже меньше, чем расчитывал.
Но подшипники как то стали кривовато, и уже не исправишь. От этого шум и потери, соответственно.
Но в конце концов это не гироскоп.
Установил две оптопары, но с моим черно-белым энкодером работало неустойчиво, сначала подбирал токи резисторами, потом плюнул, ободрал зебру и заменил - просто бронза + черная изолента.
Заработало на ура.
Вроде ничего, на 3 с плюсом. Вибрация небольшая, даже меньше, чем расчитывал.
Но подшипники как то стали кривовато, и уже не исправишь. От этого шум и потери, соответственно.
Но в конце концов это не гироскоп.
Установил две оптопары, но с моим черно-белым энкодером работало неустойчиво, сначала подбирал токи резисторами, потом плюнул, ободрал зебру и заменил - просто бронза + черная изолента.
Заработало на ура.
 Xan
Xan

RLAN> Установил две оптопары, но с моим черно-белым энкодером работало неустойчиво
Вообще-то, если управлять не моментом импульса, а моментом силы, то никаких датчиков не надо — момент силы (коллекторного движка) просто пропорционален току.
Отличие в управлении на одну производную. Или на один интеграл, смотря с какой стороны смотреть.
Вообще-то, если управлять не моментом импульса, а моментом силы, то никаких датчиков не надо — момент силы (коллекторного движка) просто пропорционален току.
Отличие в управлении на одну производную. Или на один интеграл, смотря с какой стороны смотреть.
Xan> Вообще-то, если управлять не моментом импульса, а моментом силы, то никаких датчиков не надо — момент силы (коллекторного движка) просто пропорционален току.
Xan> Отличие в управлении на одну производную. Или на один интеграл, смотря с какой стороны смотреть.
Полностью согласен и мысли такие лезут в голову.
Но я их гоню
Намного проще пилить, точить и паять, чем ломать голову над тем, как это на самом деле должно рабтать.
Защитная реакция организма Есть ощущение, что что то делаешь, не стоишь на месте, уже кайф.
А то, что на самом деле почти никуда не продвинулся - об этом думать не хочется.
Как на самом деле построить алгоритм управления - даже не знаю с какой стороны подступиться.
Например - моменты сил трения я учесть не могу - для этого и измерение угловой скорости и ее стабилизация. Накопление момента импульса приведет к возникновению гироскопических моментов, как это учитывать.
И так далее.
Xan> Отличие в управлении на одну производную. Или на один интеграл, смотря с какой стороны смотреть.
Полностью согласен и мысли такие лезут в голову.
Но я их гоню
Намного проще пилить, точить и паять, чем ломать голову над тем, как это на самом деле должно рабтать.
Защитная реакция организма
Есть ощущение, что что то делаешь, не стоишь на месте, уже кайф.А то, что на самом деле почти никуда не продвинулся - об этом думать не хочется.
Как на самом деле построить алгоритм управления - даже не знаю с какой стороны подступиться.
Например - моменты сил трения я учесть не могу - для этого и измерение угловой скорости и ее стабилизация. Накопление момента импульса приведет к возникновению гироскопических моментов, как это учитывать.
И так далее.
Опять временно останавливаюсь, но небольшие подвижки за 20 дней есть
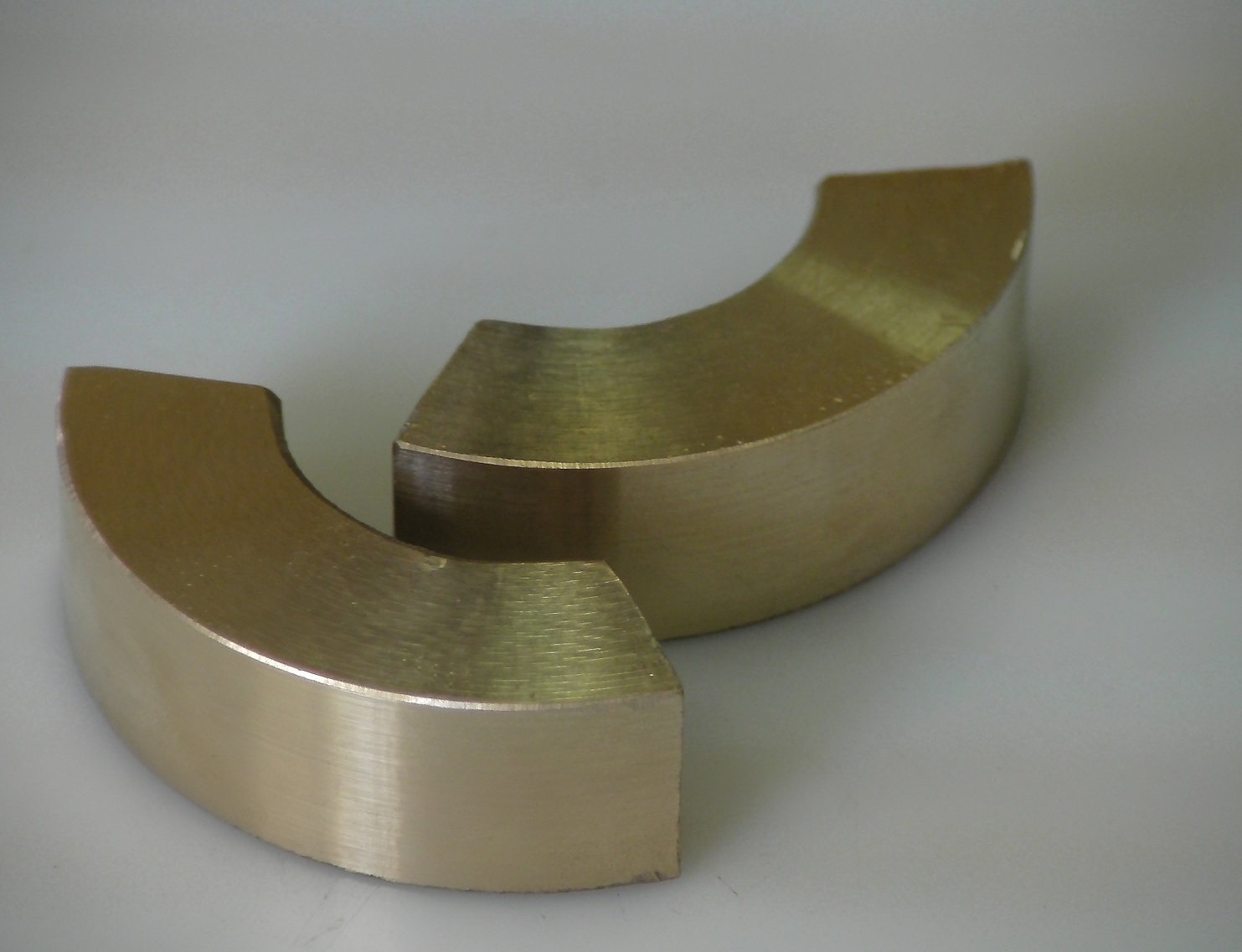
Из последнего.
Сделал эксцентрики.
Пока грузы. Узел присоединения к валу пока не придумал, так как не решил с абсолютными энкодерами.
Масса грузов 320г. Центр массы каждого смещен от оси на 31мм. То есть максимальное отклонение 640г на 31мм от оси. При наружном радиусе 55. Много это или мало?
Масса конструкции, которой планируется управлять - от 20 до 10 кг. Расстояние от ценра масс от метра до полуметра (примерно).
Можно высверлить отверстие и залить свинец. Но максимальный выгрыш может составить десятки грамм и сдвиг центра масс грузика на 1-2мм. Стоит ли оно того?
Есть о чем подумать.
Из последнего.
Сделал эксцентрики.
Пока грузы. Узел присоединения к валу пока не придумал, так как не решил с абсолютными энкодерами.
Масса грузов 320г. Центр массы каждого смещен от оси на 31мм. То есть максимальное отклонение 640г на 31мм от оси. При наружном радиусе 55. Много это или мало?
Масса конструкции, которой планируется управлять - от 20 до 10 кг. Расстояние от ценра масс от метра до полуметра (примерно).
Можно высверлить отверстие и залить свинец. Но максимальный выгрыш может составить десятки грамм и сдвиг центра масс грузика на 1-2мм. Стоит ли оно того?
Есть о чем подумать.
Прикреплённые файлы:
Передумал я управление по крену гиромотором делать. Очень сложная математика получается при накоплении момента, а сбросить его некуда.
Попробую импульсными выдвигаемыми парами рулей с фиксированным углом атаки. Расположу пониже, в средней чвсти аппаратного отсека, выше раскрываемых тормозных щитков.
Попробую импульсными выдвигаемыми парами рулей с фиксированным углом атаки. Расположу пониже, в средней чвсти аппаратного отсека, выше раскрываемых тормозных щитков.

RLAN> Передумал я управление по крену гиромотором делать. Очень сложная математика получается при накоплении момента, а сбросить его некуда.
Верю, у меня с моими простецкими "ракетками" иной раз на пол-пути "тормоз включается".
Бросаю все, и новый проект начинаю.
Как правило всегда задаюсь вопросом - "А куда девать это все?".
А через пол-года, достаешь из пылищи, и снова...........!!!
Верю, у меня с моими простецкими "ракетками" иной раз на пол-пути "тормоз включается".
Бросаю все, и новый проект начинаю.
Как правило всегда задаюсь вопросом - "А куда девать это все?".
А через пол-года, достаешь из пылищи, и снова...........!!!

А может ну его нафиг акселерометры с гироскопами.
При вертикальном полете для управления по крену достаточно компаса.
По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
Ведь, фактически нужна по этим осям коррекция, а не динамическое управление.
Аналогично на спуске, приводить вектор движения к вектору, направленному на точку приземления.
При вертикальном полете для управления по крену достаточно компаса.
По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
Ведь, фактически нужна по этим осям коррекция, а не динамическое управление.
Аналогично на спуске, приводить вектор движения к вектору, направленному на точку приземления.
RLAN> А может ну его нафиг акселерометры с гироскопами.
RLAN> При вертикальном полете для управления по крену достаточно компаса.
Да ладно? От тебя не ожидал. Не забывай, что вертикальная проекция обычно больше горизонтальной, и наклон на пару градусов может быть эквивалентен повороту на пять градусов. Т.е. если ты меряешь только проекцию на крен, то она может остаться неизменной при одновременном повороте и наклоне, и, наоборот, при наклоне с постоянным углом крена возникает иллюзия поворота. Если ты меряешь все три проекции, то и тогда вращение вокруг магнитной силовой линии может остаться незаметным.
RLAN> По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
RLAN> Ведь, фактически нужна по этим осям коррекция, а не динамическое управление.
Там задержки очень большие, без гироскопов непонятно, как обеспечивать устойчивость регулирования.
RLAN> Аналогично на спуске, приводить вектор движения к вектору, направленному на точку приземления.
А это похоже на филина-стратега "мыши, станьте ёжиками". Как минимум - кватернионное исчисление, потом пересчёт, какие рули на что влияют, ну и т.д.
RLAN> При вертикальном полете для управления по крену достаточно компаса.
Да ладно?
От тебя не ожидал. Не забывай, что вертикальная проекция обычно больше горизонтальной, и наклон на пару градусов может быть эквивалентен повороту на пять градусов. Т.е. если ты меряешь только проекцию на крен, то она может остаться неизменной при одновременном повороте и наклоне, и, наоборот, при наклоне с постоянным углом крена возникает иллюзия поворота. Если ты меряешь все три проекции, то и тогда вращение вокруг магнитной силовой линии может остаться незаметным.RLAN> По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
RLAN> Ведь, фактически нужна по этим осям коррекция, а не динамическое управление.
Там задержки очень большие, без гироскопов непонятно, как обеспечивать устойчивость регулирования.
RLAN> Аналогично на спуске, приводить вектор движения к вектору, направленному на точку приземления.
А это похоже на филина-стратега "мыши, станьте ёжиками". Как минимум - кватернионное исчисление, потом пересчёт, какие рули на что влияют, ну и т.д.

RLAN>> Аналогично на спуске, приводить вектор движения к вектору, направленному на точку приземления.
Б.г.> Как минимум - кватернионное исчисление, потом пересчёт, какие рули на что влияют, ну и т.д.
Через это всё равно придётся пройти. Это неизбежно
Б.г.> Как минимум - кватернионное исчисление, потом пересчёт, какие рули на что влияют, ну и т.д.
Через это всё равно придётся пройти. Это неизбежно

Б.г.> Да ладно? От тебя не ожидал. Не забывай, что вертикальная проекция обычно больше горизонтальной, и наклон на пару градусов может быть эквивалентен повороту на пять градусов.
А что, по технологиям сделай из г**на конфету я огого что могу.
Можно еще солнечный датчик в эту схему подвязать. Дату и время запуска можно выбрать заранее. А дрейф гироскопа по крену все равно нечем корректировать.
В моих модулях частота обмена 10 в сек. Понятно, вектор движения не будет соответствовать мгновенному положению осей ракеты. Но мне это не нужно.Я расчитываю на аэродинамическую стабилизацию, а вот коррекцию можно неторопясь выполнять по данным модуля.
От тебя не ожидал. Не забывай, что вертикальная проекция обычно больше горизонтальной, и наклон на пару градусов может быть эквивалентен повороту на пять градусов. А что, по технологиям сделай из г**на конфету я огого что могу.
Можно еще солнечный датчик в эту схему подвязать. Дату и время запуска можно выбрать заранее. А дрейф гироскопа по крену все равно нечем корректировать.
В моих модулях частота обмена 10 в сек. Понятно, вектор движения не будет соответствовать мгновенному положению осей ракеты. Но мне это не нужно.Я расчитываю на аэродинамическую стабилизацию, а вот коррекцию можно неторопясь выполнять по данным модуля.
RLAN> Можно еще солнечный датчик в эту схему подвязать.
Трёхосный магнитометр плюстрёхосный двухкоординатный солнечный датчик - это годная система, если направления на Солнце и магнитной силовой линий примерно перпендикулярны. но не "магнитный компас".
RLAN> Дату и время запуска можно выбрать заранее. А дрейф гироскопа по крену все равно нечем корректировать.
Гироскоп хорош тем, что с ним легче получить устойчивость. Т.к. он меряет напрямую угловую скорость. Дрейф на твоих временах и задачах не так важен. Если у тебя первичные датчики солнечный и магнитометр, то с гироскопа вообще нужна ТОЛЬКО угловая скорость, не угол. Можно, конечно, и вовсе без него, дифференцировать сигналы с магнитометра и т.д., но с гироскопом надёжнее.
RLAN> В моих модулях частота обмена 10 в сек.
А при этом шум координат ты знаешь какой? десяток метров легко! Это когда раз в секунду, тогда усреднение позволяет его задавить.
RLAN> Понятно, вектор движения не будет соответствовать мгновенному положению осей ракеты. Но мне это не нужно.Я расчитываю на аэродинамическую стабилизацию, а вот коррекцию можно неторопясь выполнять по данным модуля.
А коэффициенты настраивать динамически через обратные связи? Нелёгкая это работа.
Трёхосный магнитометр плюс
RLAN> Дату и время запуска можно выбрать заранее. А дрейф гироскопа по крену все равно нечем корректировать.
Гироскоп хорош тем, что с ним легче получить устойчивость. Т.к. он меряет напрямую угловую скорость. Дрейф на твоих временах и задачах не так важен. Если у тебя первичные датчики солнечный и магнитометр, то с гироскопа вообще нужна ТОЛЬКО угловая скорость, не угол. Можно, конечно, и вовсе без него, дифференцировать сигналы с магнитометра и т.д., но с гироскопом надёжнее.
RLAN> В моих модулях частота обмена 10 в сек.
А при этом шум координат ты знаешь какой? десяток метров легко! Это когда раз в секунду, тогда усреднение позволяет его задавить.
RLAN> Понятно, вектор движения не будет соответствовать мгновенному положению осей ракеты. Но мне это не нужно.Я расчитываю на аэродинамическую стабилизацию, а вот коррекцию можно неторопясь выполнять по данным модуля.
А коэффициенты настраивать динамически через обратные связи? Нелёгкая это работа.
RLAN> А может ну его нафиг акселерометры с гироскопами.
RLAN> При вертикальном полете для управления по крену достаточно компаса.
На территории России магнитное поле торчит почти вертикально 70...80 градусов.
Для просто вертикального полёта можно сделать такое:
Солнечный датчик крена — например два датчика, глядящие немного в разные стороны (влево-вправо). Чтоб наклон ракеты по X или Y не влиял, а чувствовалось только вращение по Z.
Брать разность сигналов
delta_Z = (a - b) / (a + b)
и она пойдёт сразу на управление креном.
На старте поворачивать ракету так, чтоб с датчика крена получить нулевой сигнал.
И запомнить вектор магнитометра.
В полёте по отклонению компонентов магнитного поля (H_x, H_y) от запомненных рулить по X и Y.
В полдень на экваторе такая схема работать будет плохо!
RLAN> По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
Нифига не выйдет.
И точности мало, и скорости.
И при ускорении более 4 g вообще работать не будет.
GPS можно использовать для возврата — для неспешного планирования домой.
И то лучше ориентацию определять независимо от GPS. А GPS только для определения отклонения координат.
RLAN> При вертикальном полете для управления по крену достаточно компаса.
На территории России магнитное поле торчит почти вертикально 70...80 градусов.
Для просто вертикального полёта можно сделать такое:
Солнечный датчик крена — например два датчика, глядящие немного в разные стороны (влево-вправо). Чтоб наклон ракеты по X или Y не влиял, а чувствовалось только вращение по Z.
Брать разность сигналов
delta_Z = (a - b) / (a + b)
и она пойдёт сразу на управление креном.
На старте поворачивать ракету так, чтоб с датчика крена получить нулевой сигнал.
И запомнить вектор магнитометра.
В полёте по отклонению компонентов магнитного поля (H_x, H_y) от запомненных рулить по X и Y.
В полдень на экваторе такая схема работать будет плохо!
RLAN> По тангажу и рысканью можно использовать вектор движения от ЖПС/Глонасс модуля.
Нифига не выйдет.
И точности мало, и скорости.
И при ускорении более 4 g вообще работать не будет.
GPS можно использовать для возврата — для неспешного планирования домой.
И то лучше ориентацию определять независимо от GPS. А GPS только для определения отклонения координат.
Это сообщение редактировалось 06.07.2017 в 14:01
Xan> Нифига не выйдет.
Xan> И точности мало, и скорости.
Xan> И при ускорении более 4 g вообще работать не будет..
Мой должен до 20ж. Так заявлял производитель.
Буду думать дальше. Лёжа на гальке, глядя в море и нюхая можжевельник это делать приятно, не то, что ручками работать.
Xan> И точности мало, и скорости.
Xan> И при ускорении более 4 g вообще работать не будет..
Мой должен до 20ж. Так заявлял производитель.
Буду думать дальше. Лёжа на гальке, глядя в море и нюхая можжевельник это делать приятно, не то, что ручками работать.

RLAN> Мой должен до 20ж. Так заявлял производитель.
Фамилию скажи?
Фамилию скажи?
Xan> Фамилию скажи?
Обсуждали тут. Ижевские, гражданский вариант (с цифрой 7 на конце), но спецпрошивка ( с цифрой 6), то есть,то же, что и специзделия, только без приемки.
Обсуждали тут. Ижевские, гражданский вариант (с цифрой 7 на конце), но спецпрошивка ( с цифрой 6), то есть,то же, что и специзделия, только без приемки.
Copyright © Balancer 1997..2019
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 15.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
