-
![[image]](https://www.balancer.ru/cache/forums/attaches/2014/06/128x128-crop/03-3498228-1.jpg)
Стенд и оборудование для испытаний и измерений VIII
Теги:
 mihail66
mihail66

pinko> Нельзя полагаться только на это. Всегда есть возможность для плечевого момента ...
Думал об этом. Но для вертикального расположения двигателя ничего не меняется, тот же плечевой момент может возникнуть.
pinko> Я говорю о скрепление датчика.
Спасибо за фото, именно то что и ждал увидеть.
Датчик будет крепиться именно так как на твоем фото (правда датчик другой конструкции).
Специальную металлическую опору для крепления датчика и пятак для упора уже заказал.
Думал об этом. Но для вертикального расположения двигателя ничего не меняется, тот же плечевой момент может возникнуть.
pinko> Я говорю о скрепление датчика.
Спасибо за фото, именно то что и ждал увидеть.
Датчик будет крепиться именно так как на твоем фото (правда датчик другой конструкции).
Специальную металлическую опору для крепления датчика и пятак для упора уже заказал.


 инфо
инфо инструменты
инструменты
А ты его даташит внимательно пересмотри , время для этого есть.
В случае ахтунга надо исключить перемещение/изгиб/деформацию датчика за пределы для него допустимого.
Например при помощи дистанционных болтов или шайб и т.п. жёсткого ограничения перемещения для передающего усилие от двигателя на датчик штока.
Это не более как идея для твоего стенда.
В случае ахтунга надо исключить перемещение/изгиб/деформацию датчика за пределы для него допустимого.
Например при помощи дистанционных болтов или шайб и т.п. жёсткого ограничения перемещения для передающего усилие от двигателя на датчик штока.
Это не более как идея для твоего стенда.

Maksimys> А ты его даташит внимательно пересмотри , время для этого есть.
Нет в даташите таких данных, и не встречал ни разу.
Подразумевается что деформации неизмеримо малы.
Maksimys> В случае ахтунга надо исключить ...
На случай "ахтунга" предусмотрен регулировочный винт на опоре датчика.
Нет в даташите таких данных, и не встречал ни разу.
Подразумевается что деформации неизмеримо малы.
Maksimys> В случае ахтунга надо исключить ...
На случай "ахтунга" предусмотрен регулировочный винт на опоре датчика.

 pinko
pinko

mihail66> Датчик будет крепиться именно так как на твоем фото (правда датчик другой конструкции).
mihail66> Специальную металлическую опору для крепления датчика и пятак для упора уже заказал.
Другое дело, что пятак передает силу на конструкции, на которой смонтирован. Представи себе динамичной ситуации, когда оба датчика и конструкция загибаются под нагрузкой - как две связанные пружины с немного отличающейся прочностью.
Т.е. следует следить за тем, чтобы конструкция начать изгиб после максимального сгибания датчика. В противном случае данные датчика будут неправильными - отсюда и "стальные профили для взрослых".")
mihail66> Специальную металлическую опору для крепления датчика и пятак для упора уже заказал.
Другое дело, что пятак передает силу на конструкции, на которой смонтирован. Представи себе динамичной ситуации, когда оба датчика и конструкция загибаются под нагрузкой - как две связанные пружины с немного отличающейся прочностью.
Т.е. следует следить за тем, чтобы конструкция начать изгиб после максимального сгибания датчика. В противном случае данные датчика будут неправильными - отсюда и "стальные профили для взрослых".
")

pinko> Т.е. следует следить за тем, чтобы конструкция начать изгиб после максимального сгибания датчика.
pinko, почему ты считаешь, что конструкция должна сгибаться, или испытывать нагрузки на изгиб?
У датчика очень маленькое плечо между точками приложения усилия 27,5мм.
Датчик только один.
pinko, почему ты считаешь, что конструкция должна сгибаться, или испытывать нагрузки на изгиб?
У датчика очень маленькое плечо между точками приложения усилия 27,5мм.
Датчик только один.
pinko тогда всё по феншую.
А вот почему у SashaMaks на диаграмме присутствует "гребёнка" ?
mihail66> pinko, почему ты считаешь, что конструкция должна сгибаться, или испытывать нагрузки на изгиб?
Михаил , я бы сам не поверил , но когда в универе нам на сопромате показали изгиб пластины из стали (600мм по длине ; 20мм по толщине ; 40мм по высоте) , при этом это не консоль , а две опоры по краям , то есть фактически балка.
От усилия пальца(!!!) в центр пластины , перпендикулярно её ребру 40мм(!!!). После этой демонстрации возможностей измерений деформации ... , я только тогда понял , что сталь = "резина". Визуально , да даже если бы я на ней всем весом повис , то никак она не изогнулась , это не реально , она вес машины выдержит ©.
По другому никак до студентов не доходило , но смысл довели чётко.
Поэтому у тебя должна быть как можно более жёсткая конструкция стенда , с минимальной деформацией рамы , гораздо меньшей чем деформация самого датчика.
Ты для удобства и представляй стенд/раму "резиновой" , смело можешь представить. Вот и смотри хотя бы образно , как это будет изгибаться , где вварить усилители , где что-то переставить. Так проще дошлифовать механику.
А вот почему у SashaMaks на диаграмме присутствует "гребёнка" ?
mihail66> pinko, почему ты считаешь, что конструкция должна сгибаться, или испытывать нагрузки на изгиб?
Михаил , я бы сам не поверил , но когда в универе нам на сопромате показали изгиб пластины из стали (600мм по длине ; 20мм по толщине ; 40мм по высоте) , при этом это не консоль , а две опоры по краям , то есть фактически балка.
От усилия пальца(!!!) в центр пластины , перпендикулярно её ребру 40мм(!!!). После этой демонстрации возможностей измерений деформации ... , я только тогда понял , что сталь = "резина". Визуально , да даже если бы я на ней всем весом повис , то никак она не изогнулась , это не реально , она вес машины выдержит ©.
По другому никак до студентов не доходило , но смысл довели чётко.
Поэтому у тебя должна быть как можно более жёсткая конструкция стенда , с минимальной деформацией рамы , гораздо меньшей чем деформация самого датчика.
Ты для удобства и представляй стенд/раму "резиновой" , смело можешь представить. Вот и смотри хотя бы образно , как это будет изгибаться , где вварить усилители , где что-то переставить. Так проще дошлифовать механику.
Это сообщение редактировалось 13.02.2018 в 22:22
Maksimys> Поэтому у тебя должна быть как можно более жёсткая конструкция стенда , с минимальной деформацией рамы , гораздо меньшей чем деформация самого датчика.
Блин, ну почему (от какой силы) рама должна деформироваться, если она не связана с двигателем "на колесах"?
На раме висит только датчик.
Блин, ну почему (от какой силы) рама должна деформироваться, если она не связана с двигателем "на колесах"?
На раме висит только датчик.
Прикреплённые файлы:
mihail66> Блин, ну почему (от какой силы) рама должна деформироваться, если она не связана с двигателем "на колесах"?
mihail66> На раме висит только датчик.
Вся система в конечном итоге , даже с "сопливой" МК рамы у тебя по силам будет уравновешена. Деформации МК рамы , специально пишу во множественном числе , тоже вносят погрешность в ту деформацию , которая тебе нужна , а это деформация тела датчика , в конечном итоге это будет "вялая" картинка , уже построенного графика.
Представь совокупность деформаций МК рамы как воздействие силы на датчик , но через пружину. Статически такая система будет работать хорошо , давать правильные показания датчика , но динамически ... , будет "запаздывать" , демпфировать истинное усилие.
Смотри как пример , что есть сталь (ссылка на видео ниже) в своей натуре. Кстати , давеча я вопрос задавал про "гребёнку" при измерениях - то тоже имеет место быть , но возможно не из за колебаний измерительного стенда , а более корпуса двигателя.
mihail66> На раме висит только датчик.
Вся система в конечном итоге , даже с "сопливой" МК рамы у тебя по силам будет уравновешена. Деформации МК рамы , специально пишу во множественном числе , тоже вносят погрешность в ту деформацию , которая тебе нужна , а это деформация тела датчика , в конечном итоге это будет "вялая" картинка , уже построенного графика.
Представь совокупность деформаций МК рамы как воздействие силы на датчик , но через пружину. Статически такая система будет работать хорошо , давать правильные показания датчика , но динамически ... , будет "запаздывать" , демпфировать истинное усилие.
Смотри как пример , что есть сталь (ссылка на видео ниже) в своей натуре. Кстати , давеча я вопрос задавал про "гребёнку" при измерениях - то тоже имеет место быть , но возможно не из за колебаний измерительного стенда , а более корпуса двигателя.
Это сообщение редактировалось 13.02.2018 в 23:17
Maksimys> Деформации МК рамы ...
Прости, что такое "МК"?
Прости, что такое "МК"?
Maksimys>> Деформации МК рамы ...
mihail66> Прости, что такое "МК"?
Металло Конструкция.
mihail66> Прости, что такое "МК"?
Металло Конструкция.
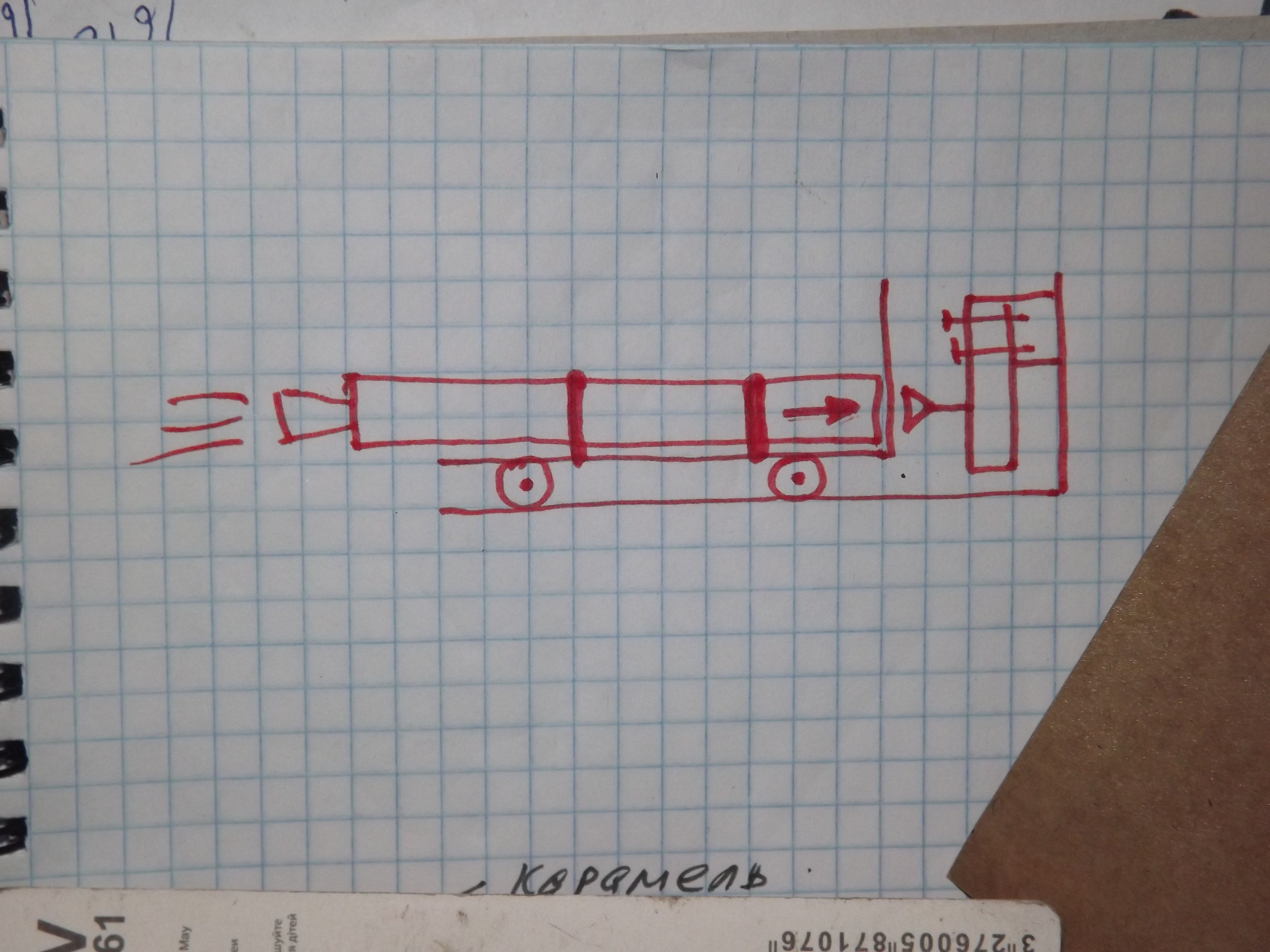
Maksimys> Металло Конструкция.
А если я вот так нарисую?
А если я вот так нарисую?
Прикреплённые файлы:


Это сообщение редактировалось 13.02.2018 в 23:26
А если посмотришь ютуберские видео SashaMaks ?
Мне интересно , что Ты заметил , как конструктор. Всё на виду , как на ладони ©.
П.С. Твоя картинка (фломастером) = не просто "гоячо" , а вовсе "жарко".
Мне интересно , что Ты заметил , как конструктор. Всё на виду , как на ладони ©.
П.С. Твоя картинка (фломастером) = не просто "гоячо" , а вовсе "жарко".
Это сообщение редактировалось 13.02.2018 в 23:32
Maksimys> Мне интересно , что Ты заметил ...
Я может чего не понял, у ствола появились колебания при выстреле.
Какое отношение это имеет к конструкции крепления датчика?
Я просто понять хочу, использовать мне механизм для перемещения двигателя на подшипниках.
Или сделать "как всегда", чтобы двигатель скользил по какой-то поверхности, что бы его трясло и он в датчик не попадал?
Я может чего не понял, у ствола появились колебания при выстреле.
Какое отношение это имеет к конструкции крепления датчика?
Я просто понять хочу, использовать мне механизм для перемещения двигателя на подшипниках.
Или сделать "как всегда", чтобы двигатель скользил по какой-то поверхности, что бы его трясло и он в датчик не попадал?
Это сообщение редактировалось 13.02.2018 в 23:39
Михаил , я стараюсь всегда буквально выражать смысл , наш язык это вполне может.
Сталь ; МК рамы ; деформации.
Для 99.9(9)% сталь , это нечто крепкое , своего рода константа в этом понимании. Но это не так. Твой датчик измеряет усилия при максимальной деформации собственного тела , около десятых долей миллиметра.
Специально ли , спонтанно - SashaMaks вешает свой стенд на кирпичную/ЖБ поверхность на анкерах , при этом в целом МК рамы уже практически ни на что не влияет , если оголовок стенда (с датчиком) мёртво закреплён на анкерах.
mihail66> Я просто понять хочу, использовать мне механизм для перемещения двигателя на подшипниках.
mihail66> Или сделать "как всегда", чтобы двигатель скользил по какой-то поверхности, что бы его трясло и он в датчик не попадал?
Здесь можешь что хочешь делать , но целесообразнее всего , сделать скольжение т.к. длина перемещения двигателя по продольной его оси будет мизерная.
Сталь ; МК рамы ; деформации.
Для 99.9(9)% сталь , это нечто крепкое , своего рода константа в этом понимании. Но это не так. Твой датчик измеряет усилия при максимальной деформации собственного тела , около десятых долей миллиметра.
Специально ли , спонтанно - SashaMaks вешает свой стенд на кирпичную/ЖБ поверхность на анкерах , при этом в целом МК рамы уже практически ни на что не влияет , если оголовок стенда (с датчиком) мёртво закреплён на анкерах.
mihail66> Я просто понять хочу, использовать мне механизм для перемещения двигателя на подшипниках.
mihail66> Или сделать "как всегда", чтобы двигатель скользил по какой-то поверхности, что бы его трясло и он в датчик не попадал?
Здесь можешь что хочешь делать , но целесообразнее всего , сделать скольжение т.к. длина перемещения двигателя по продольной его оси будет мизерная.
Это сообщение редактировалось 13.02.2018 в 23:57
Maksimys> Утрированно - МК рамы стенда , должна быть "жёстче".
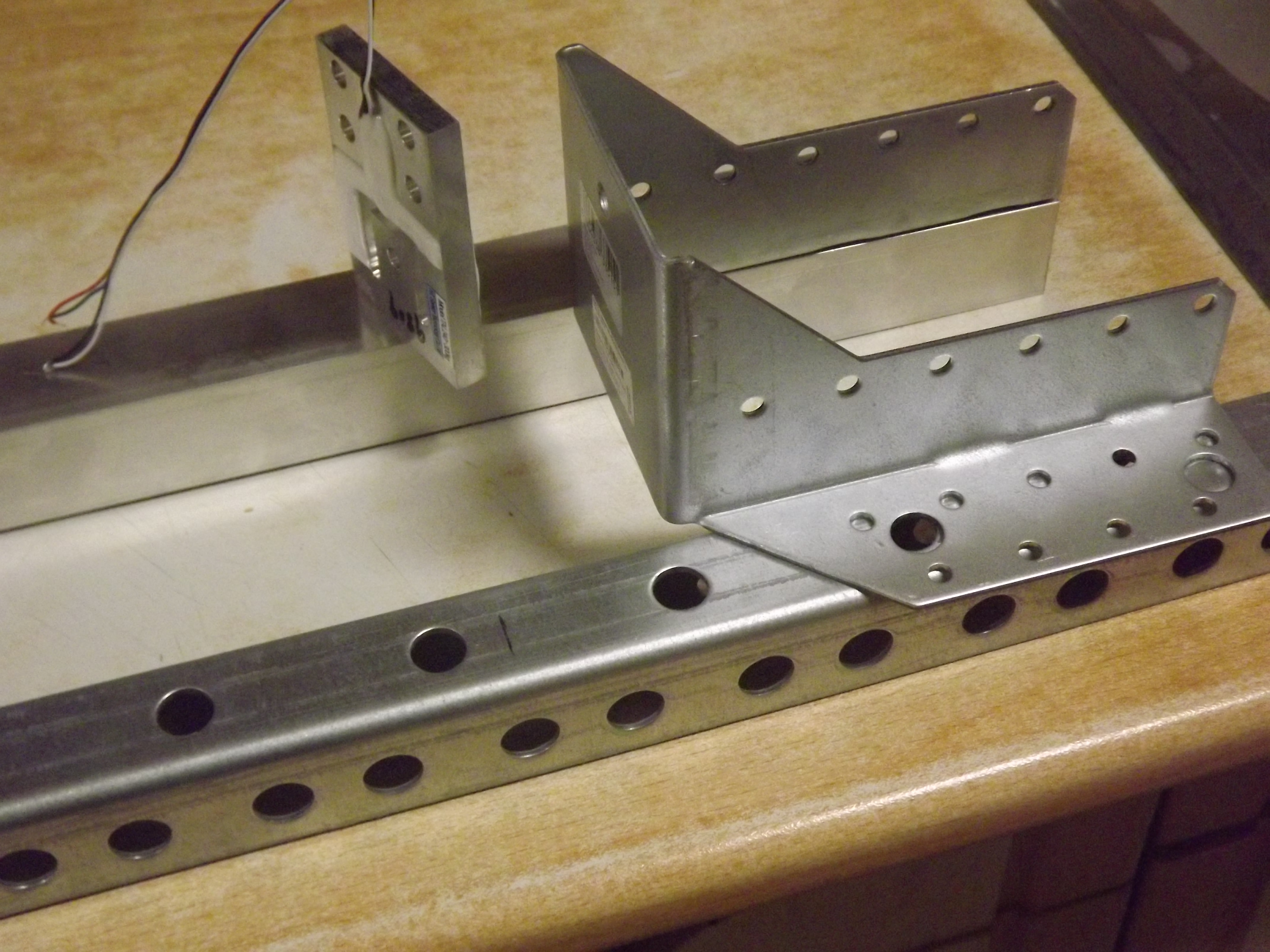
Ну вот я снял "телегу" с рамы (фото).
Понятно к какой плоскости датчик крепится?
К этой плоскости крепится опора толщиной как датчик.
Рама из профиля 2,5мм. Штампованный упор для крепления опоры датчика 2,0мм.
Неужто этого не достаточно будет?
Или мне станину из чугуна отлить?
Maksimys>....если оголовок стенда (с датчиком) мёртво закреплён на анкерах.
Вот сейчас специально посмотрел, как закреплен датчик на стенде (не стенд к стене).
"Почувствуй разницу".
Maksimys> Здесь можешь что хочешь делать , но целесообразнее всего , сделать скольжение т.к. длина перемещения двигателя по продольной его оси будет мизерная.
А по поперечным осям?
Вот именно и хочу сделать так, чтобы не зависеть от размеров двигателя.
И чтобы точка контакта "телеги" с датчиком всегда приходилась в нужное место,
т.к. перемещения "телеги" перпендикулярно оси нет!
Ну вот я снял "телегу" с рамы (фото).
Понятно к какой плоскости датчик крепится?
К этой плоскости крепится опора толщиной как датчик.
Рама из профиля 2,5мм. Штампованный упор для крепления опоры датчика 2,0мм.
Неужто этого не достаточно будет?
Или мне станину из чугуна отлить?
Maksimys>....если оголовок стенда (с датчиком) мёртво закреплён на анкерах.
Вот сейчас специально посмотрел, как закреплен датчик на стенде (не стенд к стене).
"Почувствуй разницу".
Maksimys> Здесь можешь что хочешь делать , но целесообразнее всего , сделать скольжение т.к. длина перемещения двигателя по продольной его оси будет мизерная.
А по поперечным осям?
Вот именно и хочу сделать так, чтобы не зависеть от размеров двигателя.
И чтобы точка контакта "телеги" с датчиком всегда приходилась в нужное место,
т.к. перемещения "телеги" перпендикулярно оси нет!
Прикреплённые файлы:
Это сообщение редактировалось 14.02.2018 в 00:14

Maksimys> pinko тогда всё по феншую.
Maksimys> А вот почему у SashaMaks на диаграмме присутствует "гребёнка" ?
Потому что, я контроллер менял с STM32F303 на STMF103. У последнего АЦП менее скоростной, и я наконец-то написал алгоритм непрерывного измерения через DMA, то по ряду причина стало удобнее и быстрее оставить сумму значений и не приводить её к 12 битам. А сумма 16-и значений - это эквивалент 16 бит. С точки зрения точности это почти ничего не дало. У STM32F303 колебания данных были на уровне ±0,5LSB, а тут они стали просто больше где-то в 16 раз, т.е. на ту же сумму. Иными словами, я сейчас просто разглядываю помехи)) а точность измерения осталась такой же.
Maksimys> А вот почему у SashaMaks на диаграмме присутствует "гребёнка" ?
Потому что, я контроллер менял с STM32F303 на STMF103. У последнего АЦП менее скоростной, и я наконец-то написал алгоритм непрерывного измерения через DMA, то по ряду причина стало удобнее и быстрее оставить сумму значений и не приводить её к 12 битам. А сумма 16-и значений - это эквивалент 16 бит. С точки зрения точности это почти ничего не дало. У STM32F303 колебания данных были на уровне ±0,5LSB, а тут они стали просто больше где-то в 16 раз, т.е. на ту же сумму. Иными словами, я сейчас просто разглядываю помехи)) а точность измерения осталась такой же.
mihail66> Ну вот я снял "телегу" с рамы (фото).
Да, телега лишняя будет, она ничего не даст в плане повышения той же точности измерения.
В остальном всё правильно.
Опрокидывающий момент зависит от двух геометрических параметров:
1. Расстояние между осью двигателя и плоскостью закрепления стенда (чем оно меньше, тем лучше).
2. Расстояние между крайними опорами вдоль оси двигателя (чем оно больше, тем лучше).
Это обобщённый вывод из решения данной задачи по термеху для определения сил и реакций в опорах.
Могу дать детальную методику того, как такие задачи решаются, чтобы не было более никаких домыслов и страхов в этом вопросе...
Да, телега лишняя будет, она ничего не даст в плане повышения той же точности измерения.
В остальном всё правильно.
Опрокидывающий момент зависит от двух геометрических параметров:
1. Расстояние между осью двигателя и плоскостью закрепления стенда (чем оно меньше, тем лучше).
2. Расстояние между крайними опорами вдоль оси двигателя (чем оно больше, тем лучше).
Это обобщённый вывод из решения данной задачи по термеху для определения сил и реакций в опорах.
Могу дать детальную методику того, как такие задачи решаются, чтобы не было более никаких домыслов и страхов в этом вопросе...
Михаил , давай завтра продолжим , или через почту. Спать уже клонит 01-25 по местному времени ... ,
, всё проще чем я "настращал" , здесь тоже без феншуя не обойдёшься.
Александр , всё же гребёнка может быть как следствие колебаний корпуса двигателя. Я обращал внимание на видео , на близкую к работающему двигателю камеру , судя по привязке к рельефу местности , камера заметно тряслась в этот момент. Двигатель в люфтах на стяжках креплений подавно "елозил" , а датчик это отобразил в построенной диаграмме.
, всё проще чем я "настращал" , здесь тоже без феншуя не обойдёшься.
Александр , всё же гребёнка может быть как следствие колебаний корпуса двигателя. Я обращал внимание на видео , на близкую к работающему двигателю камеру , судя по привязке к рельефу местности , камера заметно тряслась в этот момент. Двигатель в люфтах на стяжках креплений подавно "елозил" , а датчик это отобразил в построенной диаграмме.
Maksimys>> Мне интересно , что Ты заметил ...
mihail66> Я может чего не понял, у ствола появились колебания при выстреле.
mihail66> Какое отношение это имеет к конструкции крепления датчика?
Оно будет иметь отношение к этому только при условии, если ты будешь фиксировать этот стенд на не жёстком основании, таком же не жёстком, как человеческие руки. Но этого, естественно, делать не надо.
В целом такой стенд можно фиксировать длинными штырями на грунте, лучше не песчаном. Но тут есть ряд проблем, с которыми придётся столкнуться:
1. Зимой этого сделать не получиться, так как весь грунт будет мерзлый, что накладывает сезонное ограничение на испытания, а зимой оно самое время для стендовых испытаний...
2. После втыкания первого колышка, остальные три могут наткнуться на камень в грунте и придётся их перетыкать, пока все четыре не воткнуться на заданную глубину, что просто муторно и неудобно.
Поэтому тут лучше использовать готовые каменные или металлические основания.
И лучше всего вертикальная стена - это повышает выживаемость стенда при нештатных испытаниях, так как остатки двигателя имеют тенденцию падать вниз и там догорать. Так же это спасает от выкапывания площадки из под сугробов зимой.
Но тут есть недостаток - такое место для испытаний сложно найти.
Тогда можно попробовать сделать свою площадку или стену в поле, если взять мешок цемента и выкопать яму по размеру 0,5х1,0 м. Выкопанный песчаный или глинистый грунт смешать с цементом и водой, залить полученный бетон в яму и сформировать бетонную площадку. Можно даже сразу анкера залить.
mihail66> Я может чего не понял, у ствола появились колебания при выстреле.
mihail66> Какое отношение это имеет к конструкции крепления датчика?
Оно будет иметь отношение к этому только при условии, если ты будешь фиксировать этот стенд на не жёстком основании, таком же не жёстком, как человеческие руки. Но этого, естественно, делать не надо.
В целом такой стенд можно фиксировать длинными штырями на грунте, лучше не песчаном. Но тут есть ряд проблем, с которыми придётся столкнуться:
1. Зимой этого сделать не получиться, так как весь грунт будет мерзлый, что накладывает сезонное ограничение на испытания, а зимой оно самое время для стендовых испытаний...
2. После втыкания первого колышка, остальные три могут наткнуться на камень в грунте и придётся их перетыкать, пока все четыре не воткнуться на заданную глубину, что просто муторно и неудобно.
Поэтому тут лучше использовать готовые каменные или металлические основания.
И лучше всего вертикальная стена - это повышает выживаемость стенда при нештатных испытаниях, так как остатки двигателя имеют тенденцию падать вниз и там догорать. Так же это спасает от выкапывания площадки из под сугробов зимой.
Но тут есть недостаток - такое место для испытаний сложно найти.
Тогда можно попробовать сделать свою площадку или стену в поле, если взять мешок цемента и выкопать яму по размеру 0,5х1,0 м. Выкопанный песчаный или глинистый грунт смешать с цементом и водой, залить полученный бетон в яму и сформировать бетонную площадку. Можно даже сразу анкера залить.
Maksimys> Александр , всё же гребёнка может быть как следствие колебаний корпуса двигателя.
У них разные частоты колебаний:
Для двигателя - это (50...150)Гц;
Для помех - это любые частоты и чаще очень большие килогерцы или мегагерцы.
Тут уже обсуждалось: (Высотные ракеты SashaMaks [SashaMaks#01.11.17 17:10])
Там данные с контроллера на 12 бит:
И помехи на уровне ±0,5 LSB, очевидно, что изменения кривой с большей амплитудой - полезный сигнал.
У них разные частоты колебаний:
Для двигателя - это (50...150)Гц;
Для помех - это любые частоты и чаще очень большие килогерцы или мегагерцы.
Тут уже обсуждалось: (Высотные ракеты SashaMaks [SashaMaks#01.11.17 17:10])
Там данные с контроллера на 12 бит:

И помехи на уровне ±0,5 LSB, очевидно, что изменения кривой с большей амплитудой - полезный сигнал.
SashaMaks> Да, телега лишняя будет, она ничего не даст в плане повышения той же точности измерения.
Вот и Саша, как эксперт.
Попробую пояснить почему телега.
У меня один датчик, и у него одна точка для приложения силы.
У тебя все двигатели со стороны заглушки имеют одинаковую конструкцию, а у меня постоянное разнообразие.
И затея в том, чтобы заложить в "телеге" необходимое направление силы к датчику, и не козлоумничать над тем, как правильно движком на датчик надавить.
Попалась вот под руку такая приблуда, у которой очень легкое поступательное перемещение, при абсолютном отсутствии перпендикулярных люфтов.
Вот и Саша, как эксперт.
Попробую пояснить почему телега.
У меня один датчик, и у него одна точка для приложения силы.
У тебя все двигатели со стороны заглушки имеют одинаковую конструкцию, а у меня постоянное разнообразие.
И затея в том, чтобы заложить в "телеге" необходимое направление силы к датчику, и не козлоумничать над тем, как правильно движком на датчик надавить.
Попалась вот под руку такая приблуда, у которой очень легкое поступательное перемещение, при абсолютном отсутствии перпендикулярных люфтов.
SashaMaks> Тогда можно попробовать сделать свою площадку или стену в поле....
Все что выше, абсолютно согласен.
Но моя выездная площадка представляет собой горизонтальную бетонную дамбу.
Я могу или на нее пристроиться, или в нее упереться.
В конце концов пенек для упора всегда найдется.
Все что выше, абсолютно согласен.
Но моя выездная площадка представляет собой горизонтальную бетонную дамбу.
Я могу или на нее пристроиться, или в нее упереться.
В конце концов пенек для упора всегда найдется.
Maksimys> А вот почему у SashaMaks на диаграмме присутствует "гребёнка" ?
С Сашей у нас есть невысказанное согласие, я не комментирую его работу и я думаю, что он делает то же самое - это позволяет избежать эмоций и экономит пространства форума.
Maksimys> Михаил , я бы сам не поверил , но когда в универе нам на сопромате показали изгиб пластины из стали ...
Maksimys, я был на работе (разница во времени) - так что спасибо за подробное объяснение Михаилу, ты очень точно понял что я имел в виду.
С Сашей у нас есть невысказанное согласие, я не комментирую его работу и я думаю, что он делает то же самое - это позволяет избежать эмоций и экономит пространства форума.
Maksimys> Михаил , я бы сам не поверил , но когда в универе нам на сопромате показали изгиб пластины из стали ...
Maksimys, я был на работе (разница во времени) - так что спасибо за подробное объяснение Михаилу, ты очень точно понял что я имел в виду.
pinko
Спасибо , на добром слове!
Вчера , спонтанно получился вечер приятных воспоминаний.
///И затея в том, чтобы заложить в "телеге" необходимое направление силы к датчику, и не козлоумничать над тем, как правильно движком на датчик надавить.///
Здесь будут вмешиваться в измерение , инерция тележки (особенно для маленьких двигателей) ; жёсткость конструкции что давит на датчик ; в какой-то мере , точка приложения силы двигателей разного диаметра.
Здесь по хорошему , надо делать стенд как у Александра , без тележки , без лишних "посредников".
А для универсальности стенда , вижу два варианта:
1. Позиционировать двигатель относительно датчика.
2. Позиционировать датчик относительно двигателя.
Второе (2) проще.
Универсальные крепления для двигателя(ей) можно сделать из основания типа "ласточкин хвост" или "V" , а сверху к основанию поджимать перевёрнутой скобкой "U". Практически такое крепление будет обеспечивать три скользящих точки опоры для любого диаметра двигателя и хорошее его позиционирование к плоскости датчика. Датчику тогда достаточно иметь одну степень свободы , для совпадения точек приложения силы двигателя с точкой измерения. Механически надёжно и жёстко , сделать такой оголовок не трудно.
Спасибо , на добром слове!
Вчера , спонтанно получился вечер приятных воспоминаний.
///И затея в том, чтобы заложить в "телеге" необходимое направление силы к датчику, и не козлоумничать над тем, как правильно движком на датчик надавить.///
Здесь будут вмешиваться в измерение , инерция тележки (особенно для маленьких двигателей) ; жёсткость конструкции что давит на датчик ; в какой-то мере , точка приложения силы двигателей разного диаметра.
Здесь по хорошему , надо делать стенд как у Александра , без тележки , без лишних "посредников".
А для универсальности стенда , вижу два варианта:
1. Позиционировать двигатель относительно датчика.
2. Позиционировать датчик относительно двигателя.
Второе (2) проще.
Универсальные крепления для двигателя(ей) можно сделать из основания типа "ласточкин хвост" или "V" , а сверху к основанию поджимать перевёрнутой скобкой "U". Практически такое крепление будет обеспечивать три скользящих точки опоры для любого диаметра двигателя и хорошее его позиционирование к плоскости датчика. Датчику тогда достаточно иметь одну степень свободы , для совпадения точек приложения силы двигателя с точкой измерения. Механически надёжно и жёстко , сделать такой оголовок не трудно.


Это сообщение редактировалось 14.02.2018 в 10:26
Maksimys> Здесь будут вмешиваться в измерение , инерция тележки (особенно для маленьких двигателей)..
Да, про силу инерции я не подумал. Теперь бы еще понять как масса тележки будет влиять на измерение.
*И какой-то "шальной нейрон" мне подсказывает что "никак".
Тут нужно ученые головы форума подключить, чтобы понять влияние лишней массы на точность измерения.
Что до силы, которую нужно приложить для перемещения двигателя на "тачке", то она в разы меньше чем если бы он скользил. Я померил, приблизительно 30г.
Maksimys> жёсткость конструкции..., точка приложения силы двигателей разного диаметра.
Это все хрень, у меня все жестко и точно.
Если я заблуждаюсь, то хочу чтобы мне показали то место, которое будет изгибаться, и точку относительно которой будут перемещения при изгибе.
Maksimys> 1. Позиционировать двигатель относительно датчика.
Maksimys> 2. Позиционировать датчик относительно двигателя.
Вот именно от этого я и бегу.
Представь манипуляции со стендом для нескольких (3-5) разнокалиберных двигателей в полевых условиях.
Да, про силу инерции я не подумал. Теперь бы еще понять как масса тележки будет влиять на измерение.
*И какой-то "шальной нейрон" мне подсказывает что "никак".
Тут нужно ученые головы форума подключить, чтобы понять влияние лишней массы на точность измерения.
Что до силы, которую нужно приложить для перемещения двигателя на "тачке", то она в разы меньше чем если бы он скользил. Я померил, приблизительно 30г.
Maksimys> жёсткость конструкции..., точка приложения силы двигателей разного диаметра.
Это все хрень, у меня все жестко и точно.
Если я заблуждаюсь, то хочу чтобы мне показали то место, которое будет изгибаться, и точку относительно которой будут перемещения при изгибе.
Maksimys> 1. Позиционировать двигатель относительно датчика.
Maksimys> 2. Позиционировать датчик относительно двигателя.
Вот именно от этого я и бегу.
Представь манипуляции со стендом для нескольких (3-5) разнокалиберных двигателей в полевых условиях.
Copyright © Balancer 1997..2022
Создано 17.07.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 17.07.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}