-
![[image]](https://www.balancer.ru/cache/sites/i/m/img17.imageshack.us/img17/6421/128x128-crop/moonyo.png)
Что новенького про американцев на Луне
Теги:
 Hal
Hal

Mikeware> подожди про тестирование софта! лучше присоединись к моей просьбе про рассказ "о влиянии веса и крена на динамику разлета газов"!
Это верно! Надо его зафиксировать. А то скачет как блоха.
Это верно! Надо его зафиксировать. А то скачет как блоха.


 инфо
инфо инструменты
инструменты Xan
Xan

Xan>> Мне самому лениво, но там, как мне кажется, "дыра до самого низу".
Лунит> Это у тебя кажилка барахлит.
В зеркало смотришь?
Или в хрустальный шар?
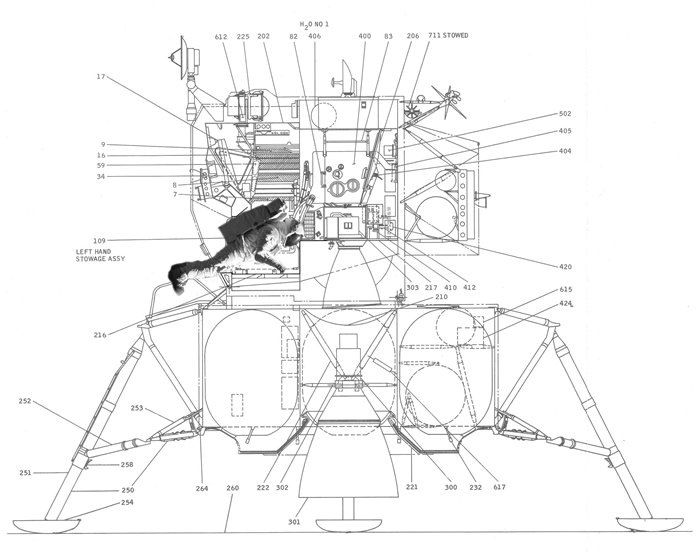
Там по центру большая квадратная дыра, куда в первый момент дует взлётный двигатель.
А потом, приподнявшись, он может дуть в "коробки" для баков, они плёночкой прикрыты.
Так что весь выхлоп легко пролетает сквозь посадочную ступень.
И смири гордыню — насовские инженеры умнее тебя.
Лунит> Это у тебя кажилка барахлит.
В зеркало смотришь?
Или в хрустальный шар?
Там по центру большая квадратная дыра, куда в первый момент дует взлётный двигатель.
А потом, приподнявшись, он может дуть в "коробки" для баков, они плёночкой прикрыты.
Так что весь выхлоп легко пролетает сквозь посадочную ступень.
И смири гордыню — насовские инженеры умнее тебя.

Лунит> Человек, который в жизни своей не написал на форум ни одного расчета, вряд ли имеет право требовать расчетов от других.
Покажи нелетателя, который привёл бы хоть один расчёт.
Афон уже в десятый раз отмалчивается от расчёта потери УИ. (У меня, кстати, получилось 1.8%.)
От тебя вообще ни одной цифры не было.
Когда я тебе сказал, что в посадочном должна быть большая дыра для выхлопа взлётной, ты сразу ГОЛОСЛОВНО обвинил меня в "кажется".
Лгать ты умеешь, да.
Считать — хрен.
Покажи нелетателя, который привёл бы хоть один расчёт.
Афон уже в десятый раз отмалчивается от расчёта потери УИ. (У меня, кстати, получилось 1.8%.)
От тебя вообще ни одной цифры не было.
Когда я тебе сказал, что в посадочном должна быть большая дыра для выхлопа взлётной, ты сразу ГОЛОСЛОВНО обвинил меня в "кажется".
Лгать ты умеешь, да.
Считать — хрен.

Xan> Там по центру большая квадратная дыра, куда в первый момент дует взлётный двигатель.
Там сверху "thermal shield" лежит. От которого при старте куски отлетали.
Там сверху "thermal shield" лежит. От которого при старте куски отлетали.



Xan>> Там по центру большая квадратная дыра, куда в первый момент дует взлётный двигатель.
3-62> Там сверху "thermal shield" лежит. От которого при старте куски отлетали.
ну дык это не щит и даже не shit, а всего-то многослойный алюминизированный майлар... Наверное, луноборцы представляют, что это должна быть плита 80см из свинца с бетоном
3-62> Там сверху "thermal shield" лежит. От которого при старте куски отлетали.
ну дык это не щит и даже не shit, а всего-то многослойный алюминизированный майлар... Наверное, луноборцы представляют, что это должна быть плита 80см из свинца с бетоном

Лунит> Ну да, т.е. тупые совки не знали как надо тестировать технику и как из испытаний делать выводы? Это тайное знание только американцам открылось? Ну кому вы это втираете...
"Сейчас уже ясно, что в инженерной части Н1, помимо полезных находок, были и нововведения, которыми нельзя похвастать. В целях экономии времени и средств (опять этот аргумент! Как все-таки повредила спешка, желание во что бы то ни стало быть «впереди планеты всей»!) отказались от стендовых испытаний первой ступени. «Если ракета полетит, а вместо второй и третьей ступени поставлены железки, то с какими глазами я из бункера выйду?» — говорил Королев. Словом, решили испытывать ракету всю разом. Но «Корд» не оправдал надежд, он не обеспечил требуемой синхронности, не успевал отключить дефектный двигатель, который влиял на всю систему Н1.
Опять же, за океаном ступени отрабатывали последовательно, и в итоге это оказалось много надежнее — «Сатурн» стартовал с первого захода. Из 25 миллиардов долларов, затраченных на проект «Аполлона», более 18 миллиардов было направлено на наземную испытательную базу и на отработку конструкции в наземных условиях. К слову, когда Н.С.Хрущев отпустил первые 500 миллионов на лунную программу, руководитель наземного испытательного комплекса Л.А.Воскресенский заявил, что для решения задачи необходимо получить в десять раз больше средств. На это С.П.Королев ответил, что, если он назовет правительству такую огромную сумму, работы будут вообще прекращены."© "Почему мы не слетали на луну"
"Сейчас уже ясно, что в инженерной части Н1, помимо полезных находок, были и нововведения, которыми нельзя похвастать. В целях экономии времени и средств (опять этот аргумент! Как все-таки повредила спешка, желание во что бы то ни стало быть «впереди планеты всей»!) отказались от стендовых испытаний первой ступени. «Если ракета полетит, а вместо второй и третьей ступени поставлены железки, то с какими глазами я из бункера выйду?» — говорил Королев. Словом, решили испытывать ракету всю разом. Но «Корд» не оправдал надежд, он не обеспечил требуемой синхронности, не успевал отключить дефектный двигатель, который влиял на всю систему Н1.
Опять же, за океаном ступени отрабатывали последовательно, и в итоге это оказалось много надежнее — «Сатурн» стартовал с первого захода. Из 25 миллиардов долларов, затраченных на проект «Аполлона», более 18 миллиардов было направлено на наземную испытательную базу и на отработку конструкции в наземных условиях. К слову, когда Н.С.Хрущев отпустил первые 500 миллионов на лунную программу, руководитель наземного испытательного комплекса Л.А.Воскресенский заявил, что для решения задачи необходимо получить в десять раз больше средств. На это С.П.Королев ответил, что, если он назовет правительству такую огромную сумму, работы будут вообще прекращены."© "Почему мы не слетали на луну"

Mikeware>> подожди про тестирование софта! лучше присоединись к моей просьбе про рассказ "о влиянии веса и крена на динамику разлета газов"!
Hal> Это верно! Надо его зафиксировать. А то скачет как блоха.
Нет-нет! Я первый! Лунит ещё про Неравномерно Искривлённую Линзу - Источник Параллакса не рассказал!
Hal> Это верно! Надо его зафиксировать. А то скачет как блоха.
Нет-нет! Я первый! Лунит ещё про Неравномерно Искривлённую Линзу - Источник Параллакса не рассказал!


Константин1962> Нет-нет! Я первый! Лунит ещё про Неравномерно Искривлённую Линзу - Источник Параллакса не рассказал!
Ну так фиксируйте. Надо требовать от него обоснований, либо признания слива. Если отмалчивается, фиксируем слив и переходим к следующему вопросу.
Ну так фиксируйте. Надо требовать от него обоснований, либо признания слива. Если отмалчивается, фиксируем слив и переходим к следующему вопросу.
Mikeware>>> подожди про тестирование софта! лучше присоединись к моей просьбе про рассказ "о влиянии веса и крена на динамику разлета газов"!
Hal>> Это верно! Надо его зафиксировать. А то скачет как блоха.
Константин1962> Нет-нет! Я первый! Лунит ещё про Неравномерно Искривлённую Линзу - Источник Параллакса не рассказал!
И не расскажет.
Потому что инсайдов начитался, а за враньё извиниться это слишком сложно и страшно - не способен он на такие подвиги, это ж не полёты на Луну опровергать, тут в самом деле надо быть смелым.
Hal>> Это верно! Надо его зафиксировать. А то скачет как блоха.
Константин1962> Нет-нет! Я первый! Лунит ещё про Неравномерно Искривлённую Линзу - Источник Параллакса не рассказал!
И не расскажет.
Потому что инсайдов начитался, а за враньё извиниться это слишком сложно и страшно - не способен он на такие подвиги, это ж не полёты на Луну опровергать, тут в самом деле надо быть смелым.
 Лунит
Лунит

Hal> Чем работа софта в земных условиях будет отличаться от работы софта в лунных?
У тебя большие проблемы с абстрактным мышлением и мышлением вообще. Разработка софта была приведена как аналогия, потому что проектирование сложного софта имеет много общего с проектированием машин и механизмов. Я не говорил, что возникнут проблемы именно у софта "Аполлонов" на подлете к Луне, я сравниваю разработку корабля как таковую с разработкой ПО.
И аналогия может быть например такая: вот вы разрабатываете некое банковское ПО, тестируете его в тестовой среде, все отлично работает.
Потом ставите в продакшн - и бац, что-то падает и отваливается.
Почему? Да потому что тестовая среда недостаточно точно отображала набор начальных условий, которые происходят в реальной среде. И какие-то баги ввиду этого не были отловлены.
Но на этом аналогия заканчивается, поскольку ПО - это виртуальная система, а "Аполлон" - реальная. И подогнать для ПО более сложную тестовую среду мы можем, а для "Аполлона" единственная полностью релевантная тестовая среда - это Луна.
Hal> Как крен влияет на динамику разлета газов? По каким формулам ты это посчитал? Какова величина влияния? Каково время влияния?
Крен приводит к асимметрии сил относительно вертикальной оси, следовательно и к асимметрии расхождения взлетного и посадочного модулей. А это неизбежно приводит и к асимметричной газодинамике.
Расчетов я не привожу именно по той причине, что в данном случае соображения на качественном уровне уже достаточно, чтобы провести дополнительный тест в реальных условиях. К сожалению, на Земле его провести невозможно, поскольку невозможно смоделировать 1/6 земной силы тяжести для крупного объекта, коим является ЛМ.
Hal> Чем испытание работы датчиков на Земле или на её орбите отличается от лунных условий?
Тем, что на завершающей фазе приземления при высоте 100 и менее метров, требуется бОльшая точность, большее быстродействие датчиков и бОльшая скорость реакции системы управления, нежели при движении по орбите.
Ты ж блин у нас чемпион по KSP, элементарный пример вот ты летишь на высоте 20 км по орбите, и датчик скорости врет на 5 м/с, сильно это повлияет на что-то? Скорее всего вообще никак.
А если ты уже в 50 метрах над поверхностью, и датчик врет на 5 м/с, то что будет? Скорее всего опрокидывания не избежать.
Hal> В А-10, тупорез!
Нерелевантность этого теста выше объяснил, так что от тупореза слышу.
У тебя большие проблемы с абстрактным мышлением и мышлением вообще. Разработка софта была приведена как аналогия, потому что проектирование сложного софта имеет много общего с проектированием машин и механизмов. Я не говорил, что возникнут проблемы именно у софта "Аполлонов" на подлете к Луне, я сравниваю разработку корабля как таковую с разработкой ПО.
И аналогия может быть например такая: вот вы разрабатываете некое банковское ПО, тестируете его в тестовой среде, все отлично работает.
Потом ставите в продакшн - и бац, что-то падает и отваливается.
Почему? Да потому что тестовая среда недостаточно точно отображала набор начальных условий, которые происходят в реальной среде. И какие-то баги ввиду этого не были отловлены.
Но на этом аналогия заканчивается, поскольку ПО - это виртуальная система, а "Аполлон" - реальная. И подогнать для ПО более сложную тестовую среду мы можем, а для "Аполлона" единственная полностью релевантная тестовая среда - это Луна.
Hal> Как крен влияет на динамику разлета газов? По каким формулам ты это посчитал? Какова величина влияния? Каково время влияния?
Крен приводит к асимметрии сил относительно вертикальной оси, следовательно и к асимметрии расхождения взлетного и посадочного модулей. А это неизбежно приводит и к асимметричной газодинамике.
Расчетов я не привожу именно по той причине, что в данном случае соображения на качественном уровне уже достаточно, чтобы провести дополнительный тест в реальных условиях. К сожалению, на Земле его провести невозможно, поскольку невозможно смоделировать 1/6 земной силы тяжести для крупного объекта, коим является ЛМ.
Hal> Чем испытание работы датчиков на Земле или на её орбите отличается от лунных условий?
Тем, что на завершающей фазе приземления при высоте 100 и менее метров, требуется бОльшая точность, большее быстродействие датчиков и бОльшая скорость реакции системы управления, нежели при движении по орбите.
Ты ж блин у нас чемпион по KSP, элементарный пример вот ты летишь на высоте 20 км по орбите, и датчик скорости врет на 5 м/с, сильно это повлияет на что-то? Скорее всего вообще никак.
А если ты уже в 50 метрах над поверхностью, и датчик врет на 5 м/с, то что будет? Скорее всего опрокидывания не избежать.
Hal> В А-10, тупорез!
Нерелевантность этого теста выше объяснил, так что от тупореза слышу.
Mikeware> И то и другое "при посадке" было испытано в полете Аполлона-10. система ориентации и стабилизации была испытана еще и в предыдущем полете.
Mikeware> Или у вас есть мнение, что система, работающая на высоте 22 км внезапно перестанет работать на 10?
По-другому она может работать на 100 метрах, когда скорость измеряется не километрами в секунду, а 1 м/с и менее. Выше привел пример для Hal, прочтите его.
Mikeware> правда, упоминая об (и сомневаясь в) этом, опровергатели забывают сомнения в двигателе F-1 ,скорости ракеты Сатурн-5, грузоподъемности ракеты, пилотируемом полете к луне и вокруг нее, с возвращением на землю
Ну так никто не доказал, что А-10 на самом деле летал к Луне, а не вокруг околоземной орбиты.
Mikeware> кстати, событие - "нерасчетное вращение взлетной ступени" - произошло. а "неминуемая гибель" не произошла. у вас какое-тоособое понимание слова "неминуемая"?
Какой же вы все-таки тугодум. Неминуемая гибель могла произойти вследствие столкновения потерявшего управляемость ЛМ с Луной, что тут непонятного? У экипажа просто не будет тех десятков секунд, что потребовались для стабилизации. Аппарат шлепается на Луну, и привет.
Mikeware> Или у вас есть мнение, что система, работающая на высоте 22 км внезапно перестанет работать на 10?
По-другому она может работать на 100 метрах, когда скорость измеряется не километрами в секунду, а 1 м/с и менее. Выше привел пример для Hal, прочтите его.
Mikeware> правда, упоминая об (и сомневаясь в) этом, опровергатели забывают сомнения в двигателе F-1 ,скорости ракеты Сатурн-5, грузоподъемности ракеты, пилотируемом полете к луне и вокруг нее, с возвращением на землю
Ну так никто не доказал, что А-10 на самом деле летал к Луне, а не вокруг околоземной орбиты.
Mikeware> кстати, событие - "нерасчетное вращение взлетной ступени" - произошло. а "неминуемая гибель" не произошла. у вас какое-тоособое понимание слова "неминуемая"?
Какой же вы все-таки тугодум. Неминуемая гибель могла произойти вследствие столкновения потерявшего управляемость ЛМ с Луной, что тут непонятного? У экипажа просто не будет тех десятков секунд, что потребовались для стабилизации. Аппарат шлепается на Луну, и привет.
Лунит>> Как можно быть уверенным, что система ориентации и стабилизация отработают адекватно в процессе снижения и посадки, если именно снижение и посадка на этом аппарате никак не тестировалась?
Tangaroa> Такой уверенности не было.
О том и речь. А с автоматическими тестами была бы бОльшая уверенность.
Tangaroa> Такой уверенности не было.
О том и речь. А с автоматическими тестами была бы бОльшая уверенность.
Ос> Что делать- отказываться?
Нет, всего лишь увеличить число итераций, добавить тест автоматической посадки и взлета.
Выбрать для этого максимально ровную область посадки, чтобы в пределах нескольких километров вероятность опрокидывания была минимальна. Поверхность Луны не настолько неровная, чтобы этого невозможно было сделать.
Ос> Лунит, а ты можешь гарантировать, что отстегивание и взлет модуля не тестировался, например, в вакуумном павильоне? Может они взяли поставили его под углом и на Земле отработали его взлет?
Под углом, в смысле на рельсах каких-то, чтобы имитировать 1/6 земной тяжести? Не знаю, проводились ли такие тесты, но данный способ понижает число степеней свободы, а значит его релевантность весьма условна.
Нет, всего лишь увеличить число итераций, добавить тест автоматической посадки и взлета.
Выбрать для этого максимально ровную область посадки, чтобы в пределах нескольких километров вероятность опрокидывания была минимальна. Поверхность Луны не настолько неровная, чтобы этого невозможно было сделать.
Ос> Лунит, а ты можешь гарантировать, что отстегивание и взлет модуля не тестировался, например, в вакуумном павильоне? Может они взяли поставили его под углом и на Земле отработали его взлет?
Под углом, в смысле на рельсах каких-то, чтобы имитировать 1/6 земной тяжести? Не знаю, проводились ли такие тесты, но данный способ понижает число степеней свободы, а значит его релевантность весьма условна.

Лунит> Нет, всего лишь увеличить число итераций, добавить тест автоматической посадки и взлета.
Это же не тебе решать- достаточно испытаний или нет, не так ли? В Чернобыле вообще не проводилось тестов, брали и делали.
Лунит> Выбрать для этого максимально ровную область посадки, чтобы в пределах нескольких километров вероятность опрокидывания была минимальна. Поверхность Луны не настолько неровная, чтобы этого невозможно было сделать.
Максимально ровную область посадки должен выбирать астронавт непосредственно при посадке, иначе никак. там нужны глаза человека или нейросеть.
Лунит> Под углом, в смысле на рельсах каких-то, чтобы имитировать 1/6 земной тяжести? Не знаю, проводились ли такие тесты, но данный способ понижает число степеней свободы, а значит его релевантность весьма условна.
Зачем имитировать лунную тяжесть? В условиях земной гравитации тест будет более сложен для аппарата. Если он его прошел на Земле, то на Луне ему оторваться проще в разы.
Это же не тебе решать- достаточно испытаний или нет, не так ли? В Чернобыле вообще не проводилось тестов, брали и делали.
Лунит> Выбрать для этого максимально ровную область посадки, чтобы в пределах нескольких километров вероятность опрокидывания была минимальна. Поверхность Луны не настолько неровная, чтобы этого невозможно было сделать.
Максимально ровную область посадки должен выбирать астронавт непосредственно при посадке, иначе никак. там нужны глаза человека или нейросеть.
Лунит> Под углом, в смысле на рельсах каких-то, чтобы имитировать 1/6 земной тяжести? Не знаю, проводились ли такие тесты, но данный способ понижает число степеней свободы, а значит его релевантность весьма условна.
Зачем имитировать лунную тяжесть? В условиях земной гравитации тест будет более сложен для аппарата. Если он его прошел на Земле, то на Луне ему оторваться проще в разы.
Ос> Максимально ровную область посадки должен выбирать астронавт непосредственно при посадке, иначе никак. там нужны глаза человека или нейросеть.
А чо, Сервееры и "Луны" по нейросети садились?
Ос> Зачем имитировать лунную тяжесть? В условиях земной гравитации тест будет более сложен для аппарата. Если он его прошел на Земле, то на Луне ему оторваться проще в разы.
Эт самое.. как бы тебе это сказать.. Тяги двигателя взлетной ступени несколько недостаточно, чтобы в земной силе тяжести вообще куда-то взлететь
А ты и не в курсе был, да? Ну тебе простительно, ты киношник, а они по натуре мечтатели, не заморачивающиеся техническими деталями))
А чо, Сервееры и "Луны" по нейросети садились?
Ос> Зачем имитировать лунную тяжесть? В условиях земной гравитации тест будет более сложен для аппарата. Если он его прошел на Земле, то на Луне ему оторваться проще в разы.
Эт самое.. как бы тебе это сказать.. Тяги двигателя взлетной ступени несколько недостаточно, чтобы в земной силе тяжести вообще куда-то взлететь
А ты и не в курсе был, да? Ну тебе простительно, ты киношник, а они по натуре мечтатели, не заморачивающиеся техническими деталями))
Лунит> По-другому она может работать на 100 метрах, когда скорость измеряется не километрами в секунду, а 1 м/с и менее. Выше привел пример для Hal, прочтите его.
И это обязательно надо тестировать в лунных условиях? на земле - никак?") Или вы считаете, что на прохождение и отражение радиоволн влияет гравитация? (отражающая способность лунного грунта была известна).
Или вы считаете, что на прохождение и отражение радиоволн влияет гравитация? (отражающая способность лунного грунта была известна).
Лунит> Ну так никто не доказал, что А-10 на самом деле летал к Луне, а не вокруг околоземной орбиты.
Ну вы же берете данные из материалов НАСА - им либо можног доверять - и тогда А-10 летал к луне, и там с ним при расстыковке случилась неприятность - либо не летал, и неприятности никакой не было...
Лунит> Какой же вы все-таки тугодум. Неминуемая гибель могла произойти вследствие столкновения потерявшего управляемость ЛМ с Луной, что тут непонятного? У экипажа просто не будет тех десятков секунд, что потребовались для стабилизации. Аппарат шлепается на Луну, и привет.
а с чего он "шлепнется на луну", если в режиме поиска вращался он вокруг вертикальной оси? Ну и в итоге на испытаниях такая проблема была выявлена - видимо, приняты какие-то решения. Т.е. испытание без посадки вполне себя оправдало. В дальнейших полетах такой проблемы не было.
И это обязательно надо тестировать в лунных условиях? на земле - никак?
") Или вы считаете, что на прохождение и отражение радиоволн влияет гравитация? (отражающая способность лунного грунта была известна).
Или вы считаете, что на прохождение и отражение радиоволн влияет гравитация? (отражающая способность лунного грунта была известна).Лунит> Ну так никто не доказал, что А-10 на самом деле летал к Луне, а не вокруг околоземной орбиты.
Ну вы же берете данные из материалов НАСА - им либо можног доверять - и тогда А-10 летал к луне, и там с ним при расстыковке случилась неприятность - либо не летал, и неприятности никакой не было...
Лунит> Какой же вы все-таки тугодум. Неминуемая гибель могла произойти вследствие столкновения потерявшего управляемость ЛМ с Луной, что тут непонятного? У экипажа просто не будет тех десятков секунд, что потребовались для стабилизации. Аппарат шлепается на Луну, и привет.
а с чего он "шлепнется на луну", если в режиме поиска вращался он вокруг вертикальной оси? Ну и в итоге на испытаниях такая проблема была выявлена - видимо, приняты какие-то решения. Т.е. испытание без посадки вполне себя оправдало. В дальнейших полетах такой проблемы не было.
Лунит> А чо, Сервееры и "Луны" по нейросети садились?
Именно поэтому было потеряно несколько аппаратов.
Лунный комплекс более чем на порядок дороже Сервейера. Зачем лишний раз глобить деньги без внятной необходимости?
Именно поэтому было потеряно несколько аппаратов.
Лунный комплекс более чем на порядок дороже Сервейера. Зачем лишний раз глобить деньги без внятной необходимости?
Лунит> А чо, Сервееры и "Луны" по нейросети садились?
Они садились немного иначе, чем необходимо для безопасной посадки человека. Или мы уже ставим знак равенства между грохающимся беспилотником и пилотируемым аппаратом? Тогда проблем вообще нет- сервееры испытали весь цикл.
Лунит> Эт самое.. как бы тебе это сказать.. Тяги двигателя взлетной ступени несколько недостаточно, чтобы в земной силе тяжести вообще куда-то взлететь
Лунит> А ты и не в курсе был, да? Ну тебе простительно, ты киношник, а они по натуре мечтатели, не заморачивающиеся техническими деталями))
Окей, к взлетной ступени прикручивался канат с противовесом, компенсирующий 5/6 веса. что теперь тебя не устраивает?
Они садились немного иначе, чем необходимо для безопасной посадки человека. Или мы уже ставим знак равенства между грохающимся беспилотником и пилотируемым аппаратом? Тогда проблем вообще нет- сервееры испытали весь цикл.
Лунит> Эт самое.. как бы тебе это сказать.. Тяги двигателя взлетной ступени несколько недостаточно, чтобы в земной силе тяжести вообще куда-то взлететь
Лунит> А ты и не в курсе был, да? Ну тебе простительно, ты киношник, а они по натуре мечтатели, не заморачивающиеся техническими деталями))
Окей, к взлетной ступени прикручивался канат с противовесом, компенсирующий 5/6 веса. что теперь тебя не устраивает?
Mikeware> И это обязательно надо тестировать в лунных условиях? на земле - никак?
Тесту на Земле мешает одна маленькая неприятность, тяга двигателя недостаточна для преодоления земной силы тяжести. Тесты же на LLRV - это фактически другой аппарат, подходящий в какой-то мере для тренировки пилота, но не для теста автоматических систем.
Mikeware> а с чего он "шлепнется на луну", если в режиме поиска вращался он вокруг вертикальной оси?
Сегодня вертикальная, а завтра и горизонтальная.
Тесту на Земле мешает одна маленькая неприятность, тяга двигателя недостаточна для преодоления земной силы тяжести. Тесты же на LLRV - это фактически другой аппарат, подходящий в какой-то мере для тренировки пилота, но не для теста автоматических систем.
Mikeware> а с чего он "шлепнется на луну", если в режиме поиска вращался он вокруг вертикальной оси?
Сегодня вертикальная, а завтра и горизонтальная.
Ос> Окей, к взлетной ступени прикручивался канат с противовесом, компенсирующий 5/6 веса. что теперь тебя не устраивает?
Канат дополнительно стабилизирует по вертикали, так что не годится.
Канат дополнительно стабилизирует по вертикали, так что не годится.
Лунит>>> Как можно быть уверенным, что система ориентации и стабилизация отработают адекватно в процессе снижения и посадки, если именно снижение и посадка на этом аппарате никак не тестировалась?
Tangaroa>> Такой уверенности не было.
Лунит> О том и речь. А с автоматическими тестами была бы бОльшая уверенность.
как автоматические тесты помогли Комарову?
Tangaroa>> Такой уверенности не было.
Лунит> О том и речь. А с автоматическими тестами была бы бОльшая уверенность.
как автоматические тесты помогли Комарову?
Лунит> Почему? Да потому что тестовая среда недостаточно точно отображала набор начальных условий, которые происходят в реальной среде. И какие-то баги ввиду этого не были отловлены.
Пространство данных у AGC было гораздо меньше. Тестировали тщательно. И все равно был косяк. который опять де, разрулил человек. и без человека этого косяка скорее всего бы не было. Забавно, правда?
Лунит> Крен приводит к асимметрии сил относительно вертикальной оси, следовательно и к асимметрии расхождения взлетного и посадочного модулей. А это неизбежно приводит и к асимметричной газодинамике.
С какого перепугу-то? силы действуют строго симметрично. (Это у вас черт стрелочку украл).
Лунит> Расчетов я не привожу именно по той причине, что в данном случае соображения на качественном уровне уже достаточно, чтобы провести дополнительный тест в реальных условиях. К сожалению, на Земле его провести невозможно, поскольку невозможно смоделировать 1/6 земной силы тяжести для крупного объекта, коим является ЛМ.
на качественом уровне вы генерируете качественный бред, прекрасно детектируемый даже, наверное, средним учеником по физике из 8 класса СОШ. впочем, он же может взять, допустим, того же Шунейко, и примерно посчитать без всяких натурных экспериментов...
Лунит> Тем, что на завершающей фазе приземления при высоте 100 и менее метров, требуется бОльшая точность, большее быстродействие датчиков и бОльшая скорость реакции системы управления, нежели при движении по орбите.
Датчики работали совершенно в одинаковом режиме (точнее, емнип, в двух). Все это описано даже у Шунейко. Их работа была испытана на А-10. проблем не выявлено.
Лунит> А если ты уже в 50 метрах над поверхностью, и датчик врет на 5 м/с, то что будет? Скорее всего
опрокидывания не избежать.
Ну, во-первых, для испытания ДИСС лунная поверхность совершенно не обязательна. во вторых, при отказе ДИСС посадка просто отменялась, ступени расстыковывались, и взлетная ступень возвращалась на орбиту... Ну и кроме того, если "датчик врет" в беспилотном полете - комплекс будет потерян. а при пилотируемом - пилот может взять управление на себя. и исправить ситуацию. т.е. опять "беспилотная посадка - тупая и бесполезная трата денег"
Пространство данных у AGC было гораздо меньше. Тестировали тщательно. И все равно был косяк. который опять де, разрулил человек. и без человека этого косяка скорее всего бы не было. Забавно, правда?
Лунит> Крен приводит к асимметрии сил относительно вертикальной оси, следовательно и к асимметрии расхождения взлетного и посадочного модулей. А это неизбежно приводит и к асимметричной газодинамике.
С какого перепугу-то? силы действуют строго симметрично. (Это у вас черт стрелочку украл).
Лунит> Расчетов я не привожу именно по той причине, что в данном случае соображения на качественном уровне уже достаточно, чтобы провести дополнительный тест в реальных условиях. К сожалению, на Земле его провести невозможно, поскольку невозможно смоделировать 1/6 земной силы тяжести для крупного объекта, коим является ЛМ.
на качественом уровне вы генерируете качественный бред, прекрасно детектируемый даже, наверное, средним учеником по физике из 8 класса СОШ. впочем, он же может взять, допустим, того же Шунейко, и примерно посчитать без всяких натурных экспериментов...
Лунит> Тем, что на завершающей фазе приземления при высоте 100 и менее метров, требуется бОльшая точность, большее быстродействие датчиков и бОльшая скорость реакции системы управления, нежели при движении по орбите.
Датчики работали совершенно в одинаковом режиме (точнее, емнип, в двух). Все это описано даже у Шунейко. Их работа была испытана на А-10. проблем не выявлено.
Лунит> А если ты уже в 50 метрах над поверхностью, и датчик врет на 5 м/с, то что будет? Скорее всего
опрокидывания не избежать.
Ну, во-первых, для испытания ДИСС лунная поверхность совершенно не обязательна. во вторых, при отказе ДИСС посадка просто отменялась, ступени расстыковывались, и взлетная ступень возвращалась на орбиту... Ну и кроме того, если "датчик врет" в беспилотном полете - комплекс будет потерян. а при пилотируемом - пилот может взять управление на себя. и исправить ситуацию. т.е. опять "беспилотная посадка - тупая и бесполезная трата денег"
Лунит> И подогнать для ПО более сложную тестовую среду мы можем, а для "Аполлона" единственная полностью релевантная тестовая среда - это Луна.
Для пилотируемого корабля полностью релевантная среда - это пилотируемый полёт. "Аполлон-11" был таким тестом, доказавшим работоспособность и пригодность системы к эксплуатации.
Для пилотируемого корабля полностью релевантная среда - это пилотируемый полёт. "Аполлон-11" был таким тестом, доказавшим работоспособность и пригодность системы к эксплуатации.
Лунит> Ну так никто не доказал, что А-10 на самом деле летал к Луне, а не вокруг околоземной орбиты.
Ну так никто не опроверг то, что А-10 на самом деле летал к Луне. Ты будешь первым, если у тебя получится.
Ну так никто не опроверг то, что А-10 на самом деле летал к Луне. Ты будешь первым, если у тебя получится.
Лунит> Эт самое.. как бы тебе это сказать.. Тяги двигателя взлетной ступени несколько недостаточно, чтобы в земной силе тяжести вообще куда-то взлететь
Американцы были настолько тупые, что испытывали двигатели на стендах, предварительно всё просчитав и проверяя действительность на соответствие замыслу.
Американцы были настолько тупые, что испытывали двигатели на стендах, предварительно всё просчитав и проверяя действительность на соответствие замыслу.
Copyright © Balancer 1997..2024
Создано 05.03.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 05.03.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
