 Xan
Xan

 инфо
инфо инструменты
инструменты Полл
Полл


 Bredonosec
Bredonosec


 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/ru/le/lenta/icdn/images/2014/12/18/06/20141218060338896/128x128-crop/original_c86899384a19b8c83feb92c2f2d499dc.jpg)
Поход к астероидам (сугубо по делу)
Теги:
Полл> Но делают же карты содержания водорода в коре Луны и Марса? Какой аппаратурой это делается?
Совсем другое. Меряют рассеянные нейтроны, которых в космосе довольно прилично.
На Земле и то десяток в секунду в человека прилетает.
Полл> А как насчет источника энергии? Особенно, если астероид вращается.
Для маленького — солнечная батарея. И аккум.
Если половину астероидного "дня" будет солнце, то и хватит.
Xan>> Надо направленную антенну, приводы/ориентацию, нехилый передатчик.
Полл> В нашу весовую категорию это хозяйство с потребным источником энергии не помещается в принципе.
Я для лунной экспедиции весом 100 граммов прикидывал. Несколько ватт. С использованием на Земле любительской тарелки диаметром 6 метров.
Кина в ХД не будет, но фотки — да.
С астероидом, конечно, хуже.
Полл> "Подпрыгнуть" на астероиде действительно не сложно. А вот садиться проблема. Как будем выбирать место посадки во время прыжка?
У меня в древних планах было использование датчиков оптических мышей. Которые выдают смещение по X и Y. Несколько под разными углами смотрят на поверхность, и очень маломощными мозгами можно понять, как относительно поверхности двигаешься.
Но сейчас таких мышей уже не делают, наверное.")
Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Или сделать таракана с несколькими ногами, который может ходить наощупь.
В отличие от Марса, столкновения/падения не смертельны.
Совсем другое. Меряют рассеянные нейтроны, которых в космосе довольно прилично.
На Земле и то десяток в секунду в человека прилетает.
Полл> А как насчет источника энергии? Особенно, если астероид вращается.
Для маленького — солнечная батарея. И аккум.
Если половину астероидного "дня" будет солнце, то и хватит.
Xan>> Надо направленную антенну, приводы/ориентацию, нехилый передатчик.
Полл> В нашу весовую категорию это хозяйство с потребным источником энергии не помещается в принципе.
Я для лунной экспедиции весом 100 граммов прикидывал. Несколько ватт. С использованием на Земле любительской тарелки диаметром 6 метров.
Кина в ХД не будет, но фотки — да.
С астероидом, конечно, хуже.
Полл> "Подпрыгнуть" на астероиде действительно не сложно. А вот садиться проблема. Как будем выбирать место посадки во время прыжка?
У меня в древних планах было использование датчиков оптических мышей. Которые выдают смещение по X и Y. Несколько под разными углами смотрят на поверхность, и очень маломощными мозгами можно понять, как относительно поверхности двигаешься.
Но сейчас таких мышей уже не делают, наверное.
")
Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Или сделать таракана с несколькими ногами, который может ходить наощупь.
В отличие от Марса, столкновения/падения не смертельны.

Xan> Совсем другое. Меряют рассеянные нейтроны, которых в космосе довольно прилично.
А как эта аппаратура по массо-габаритам?
Xan> Для маленького — солнечная батарея. И аккум.
Xan> Если половину астероидного "дня" будет солнце, то и хватит.
"Фил" попал в ситуацию, когда Солнце его освещало намного меньше, чем половина времени.
Xan> Я для лунной экспедиции весом 100 граммов прикидывал. Несколько ватт. С использованием на Земле любительской тарелки диаметром 6 метров.
Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
У нас дальность 40-100 расстояний до Луны.
Xan> У меня в древних планах было использование датчиков оптических мышей. ... Но сейчас таких мышей уже не делают, наверное.
Оптроны выпускают, никуда они не делись. Более того, нынешние лазерные мыши используют их же.
Но что будет делать наш зонд если сместившись на полметра в сторону потеряет подстилающую поверхность в принципе?
На астероиде - вполне возможный вариант.
Или столкнется с этой подстилающей поверхностью, которая в данном месте оказалась вообще нависающей - опять же вариант "Филы".
Xan> В отличие от Марса, столкновения/падения не смертельны.
Это не так. Стряхнет зонд на себя чуток пыли, которая окажется аналогом реголита - то есть липкой, и лишится электроэнергии от СБ. Конец.
А как эта аппаратура по массо-габаритам?
Xan> Для маленького — солнечная батарея. И аккум.
Xan> Если половину астероидного "дня" будет солнце, то и хватит.
"Фил" попал в ситуацию, когда Солнце его освещало намного меньше, чем половина времени.
Xan> Я для лунной экспедиции весом 100 граммов прикидывал. Несколько ватт. С использованием на Земле любительской тарелки диаметром 6 метров.
Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
У нас дальность 40-100 расстояний до Луны.
Xan> У меня в древних планах было использование датчиков оптических мышей. ... Но сейчас таких мышей уже не делают, наверное.
Оптроны выпускают, никуда они не делись. Более того, нынешние лазерные мыши используют их же.
Но что будет делать наш зонд если сместившись на полметра в сторону потеряет подстилающую поверхность в принципе?
На астероиде - вполне возможный вариант.
Или столкнется с этой подстилающей поверхностью, которая в данном месте оказалась вообще нависающей - опять же вариант "Филы".
Xan> В отличие от Марса, столкновения/падения не смертельны.
Это не так. Стряхнет зонд на себя чуток пыли, которая окажется аналогом реголита - то есть липкой, и лишится электроэнергии от СБ. Конец.


Полл> А как эта аппаратура по массо-габаритам?
Я не знаю, чем они там конкретно меряли.
В столе валяется нейтронный счётчик, диаметр 32, длина 320, вес 150 г.
Полл> "Фил" попал в ситуацию, когда Солнце его освещало намного меньше, чем половина времени.
Если аккум сел, электроника должна полностью засыпать и ждать зарядки.
А у них, как я понял, что-то оставалось жрущее ток и зарядить аккум для полноценного (хотя бы и короткого) функционирования не получалось.
Полл> Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
Не, у меня своя!
Полл> У нас дальность 40-100 расстояний до Луны.
Это понятно.
Электроника развивается. Больше частота, уже луч, больше мощность на Земле.
Полл> На астероиде
Ну, задач много, да!
Мне кажется, что в качестве "астероидохода" будет хорош таракан с длинными ногами и электростатическим прилипанием.
На ногах пучок тонких волокон, на которые подаётся переменка. При напруге 300 вольт в каждой точке касания получается сила порядка одного миллиграмма. Если на каждой ноге сотня волосков, то это огромный избыток, так как сила гравитации порядка 0.1 миллиграмма.
Кроме того, глядя на изменения напруги можно понять, в какой степени нога касается поверхности.
Я не знаю, чем они там конкретно меряли.
В столе валяется нейтронный счётчик, диаметр 32, длина 320, вес 150 г.
Полл> "Фил" попал в ситуацию, когда Солнце его освещало намного меньше, чем половина времени.
Если аккум сел, электроника должна полностью засыпать и ждать зарядки.
А у них, как я понял, что-то оставалось жрущее ток и зарядить аккум для полноценного (хотя бы и короткого) функционирования не получалось.
Полл> Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
Не, у меня своя!

Полл> У нас дальность 40-100 расстояний до Луны.
Это понятно.
Электроника развивается. Больше частота, уже луч, больше мощность на Земле.
Полл> На астероиде
Ну, задач много, да!
Мне кажется, что в качестве "астероидохода" будет хорош таракан с длинными ногами и электростатическим прилипанием.
На ногах пучок тонких волокон, на которые подаётся переменка. При напруге 300 вольт в каждой точке касания получается сила порядка одного миллиграмма. Если на каждой ноге сотня волосков, то это огромный избыток, так как сила гравитации порядка 0.1 миллиграмма.
Кроме того, глядя на изменения напруги можно понять, в какой степени нога касается поверхности.
Xan> В столе валяется нейтронный счётчик, диаметр 32, длина 320, вес 150 г.
Это массо-габариты прибора, который применим для изучения астероида на дистанции порядка 100 метров?
Полл>> Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
Xan> Не, у меня своя!
Какой ты богатенький Буратино!
Xan> Электроника развивается. Больше частота, уже луч, больше мощность на Земле.
В пределе - переход на лазер. И полной ложкой проблемы с прозрачностью атмосферы и среды вокруг зонда, наведение луча и т.д. У Зеленого Кота этот вариант проработали.
Xan> Мне кажется, что в качестве "астероидохода" будет хорош
Астероидоход - это уже вторая (или третья) миссия. Когда будет понятно, что из себя представляет астероид, из какого материала его поверхность, и что поверхностный бот должен на нем исследовать.
Это массо-габариты прибора, который применим для изучения астероида на дистанции порядка 100 метров?
Полл>> Про какую "лунную экспедицию" ты говоришь, "Зеленого Кота"?
Xan> Не, у меня своя!
Какой ты богатенький Буратино!
Xan> Электроника развивается. Больше частота, уже луч, больше мощность на Земле.
В пределе - переход на лазер. И полной ложкой проблемы с прозрачностью атмосферы и среды вокруг зонда, наведение луча и т.д. У Зеленого Кота этот вариант проработали.
Xan> Мне кажется, что в качестве "астероидохода" будет хорош
Астероидоход - это уже вторая (или третья) миссия. Когда будет понятно, что из себя представляет астероид, из какого материала его поверхность, и что поверхностный бот должен на нем исследовать.
Полл> Это массо-габариты прибора, который применим для изучения астероида на дистанции порядка 100 метров?
Это детектор тепловых нейтронов, газовый счётчик с гелием-3 внутри.
Электроника к нему может весить граммов 10...30 и жрать около 100 микроампер от 3.7В.
Его ли надо применять, так прямо не скажу, не интересовался подробностями.
Нейтроны без атмосферы летят на сотни км и дальше.
Но желательно, чтоб объект как можно больший кусок неба загораживал.
Полл> Астероидоход - это уже вторая (или третья) миссия. Когда будет понятно, что из себя представляет астероид, из какого материала его поверхность, и что поверхностный бот должен на нем исследовать.
Это детектор тепловых нейтронов, газовый счётчик с гелием-3 внутри.
Электроника к нему может весить граммов 10...30 и жрать около 100 микроампер от 3.7В.
Его ли надо применять, так прямо не скажу, не интересовался подробностями.
Нейтроны без атмосферы летят на сотни км и дальше.
Но желательно, чтоб объект как можно больший кусок неба загораживал.
Полл> Астероидоход - это уже вторая (или третья) миссия. Когда будет понятно, что из себя представляет астероид, из какого материала его поверхность, и что поверхностный бот должен на нем исследовать.

kiexela
новичок
Форуму привет! Надеюсь статья из ссылки поможет вам не просто тащить большую тарелку антенны на вашем корабле но и сделать так чтобы она помогла разогнать его:

Если коротко то в статье объясняется механизм создания движущих сил,который почему то обходят до сих пор вниманием но который работает повсеместно.
СТАТЬИ И ПУБЛИКАЦИИ - О необычных принципах создания движущих сил, самоускоряющихся планетах и загадке аномального ускорения «Пионера 10» и «Пионера 11».
Выбрать Язык: Добро пожаловать, Гость. Пожалуйста Войдите или Регистрация ПОМОЩЬ В ПАТЕНТОВАНИИ НАУЧНО-ТЕХНИЧЕСКИЙ ФОРУМ Научно-техническая библиотека Главная Справка Поиск Вход Регистрация Страницы: 1 ОтправитьПечать О необычных принципах создания движущих сил, самоускоряющихся планетах и… // Дальше — www.sciteclibrary.ruЕсли коротко то в статье объясняется механизм создания движущих сил,который почему то обходят до сих пор вниманием но который работает повсеместно.
kiexela> Форуму привет! Надеюсь статья из ссылки поможет вам не просто тащить большую тарелку антенны на вашем корабле
В 25 кг стартовой массы "большая тарелка" не поместится никак.
В 25 кг стартовой массы "большая тарелка" не поместится никак.
Xan> У меня в древних планах было использование датчиков оптических мышей.
Xan> Но сейчас таких мышей уже не делают, наверное.
Xan> Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Там, в мыши, нет никаких специальных датчиков. Там именно что высокоскоростная камера и коррелятор, определяющий смещение картинки. В принципе, ничего сложного. Есть тонкости с определением малых смещений, но не более того.
Xan> Но сейчас таких мышей уже не делают, наверное.
Xan> Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Там, в мыши, нет никаких специальных датчиков. Там именно что высокоскоростная камера и коррелятор, определяющий смещение картинки. В принципе, ничего сложного. Есть тонкости с определением малых смещений, но не более того.


Xan>> У меня в древних планах было использование датчиков оптических мышей.
Xan>> Но сейчас таких мышей уже не делают, наверное.
Xan>> Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Sandro> Там, в мыши, нет никаких специальных датчиков. Там именно что высокоскоростная камера и коррелятор, определяющий смещение картинки. В принципе, ничего сложного. Есть тонкости с определением малых смещений, но не более того.
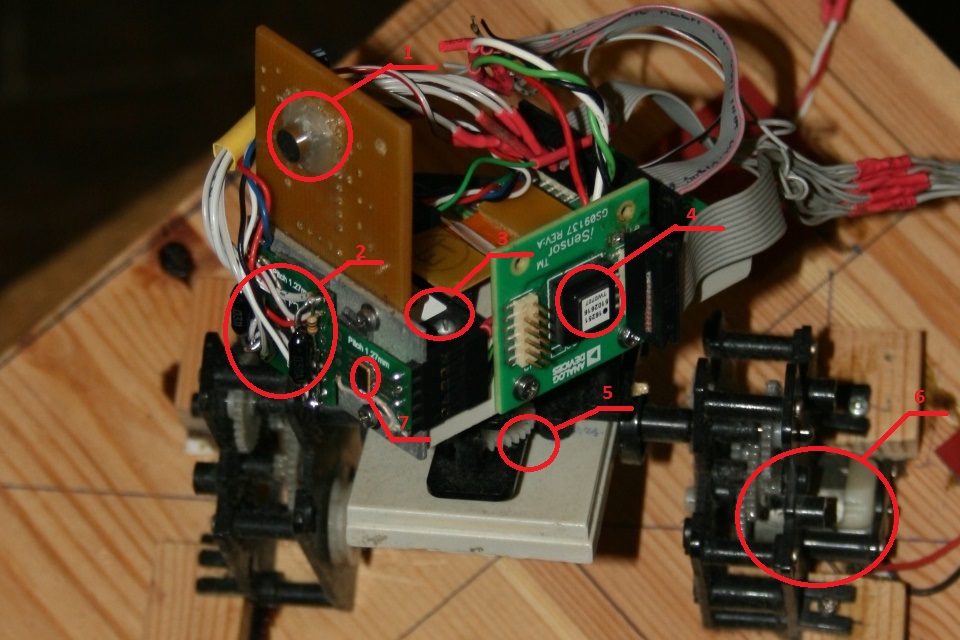
Там, в мыши, стоит несколько электронных компонентов. Раньше датчик и интерфейс - это были две разные микросхемы, сейчас - одна. Когда они были разные, можно было получать доступ к изображению, создаваемому камерой. Самый известный датчик такого рода - ADNS2051. Там 16х16 пикселей, 64 градации серого, зато безумная глубина автоматической регулировки яркости.
Я тоже пытался делать на этой штуке фигню, показывающую отклонение от направления на Солнце. На картинке она под номером 1
Xan>> Но сейчас таких мышей уже не делают, наверное.
Xan>> Ну, можно с камеры обрабатывать изображение, но мозги более жрущие нужны.
Sandro> Там, в мыши, нет никаких специальных датчиков. Там именно что высокоскоростная камера и коррелятор, определяющий смещение картинки. В принципе, ничего сложного. Есть тонкости с определением малых смещений, но не более того.
Там, в мыши, стоит несколько электронных компонентов. Раньше датчик и интерфейс - это были две разные микросхемы, сейчас - одна. Когда они были разные, можно было получать доступ к изображению, создаваемому камерой. Самый известный датчик такого рода - ADNS2051. Там 16х16 пикселей, 64 градации серого, зато безумная глубина автоматической регулировки яркости.
Я тоже пытался делать на этой штуке фигню, показывающую отклонение от направления на Солнце. На картинке она под номером 1
Прикреплённые файлы:


Xan> Это детектор тепловых нейтронов, газовый счётчик с гелием-3 внутри.
Xan> Электроника к нему может весить граммов 10...30 и жрать около 100 микроампер от 3.7В.
Xan> Его ли надо применять, так прямо не скажу, не интересовался подробностями.
Xan> Нейтроны без атмосферы летят на сотни км и д
А нейтроны откуда берутся? Их туда не нужно пулять сначала, чтоб назад получить медленные для регистрации?
Xan> Электроника к нему может весить граммов 10...30 и жрать около 100 микроампер от 3.7В.
Xan> Его ли надо применять, так прямо не скажу, не интересовался подробностями.
Xan> Нейтроны без атмосферы летят на сотни км и д
А нейтроны откуда берутся? Их туда не нужно пулять сначала, чтоб назад получить медленные для регистрации?


В.Л.> А нейтроны откуда берутся? Их туда не нужно пулять сначала, чтоб назад получить медленные для регистрации?
Высокоэнергичные частицы космических лучей сталкиваются с веществом и летит всякий дрызг, в том числе и нейтроны.
Дальше нейтроны, стукаясь о ядра замедляются и поглощаются.
В зависимости от того, какой процесс преобладает, получается разный спектр нейтронов.
Водород тормозит очень хорошо, с ним низкоэнергичных получается больше.
Высокоэнергичные частицы космических лучей сталкиваются с веществом и летит всякий дрызг, в том числе и нейтроны.
Дальше нейтроны, стукаясь о ядра замедляются и поглощаются.
В зависимости от того, какой процесс преобладает, получается разный спектр нейтронов.
Водород тормозит очень хорошо, с ним низкоэнергичных получается больше.
Sandro>> Там, в мыши, нет никаких специальных датчиков. Там именно что высокоскоростная камера и коррелятор, ...
Б.г.> Там, в мыши, стоит несколько электронных компонентов.
Да знаю я. В 2001 ЕМНИМС году сидел в соседней комнате с ребятами, которые всё это дело потрошили и пытались сделать отечественную версию. Могло бы пойти в серию, но в виду неадекватного технического руководства проекта ...
А так была бы отечественная оптическая мышь, причём в самом начале продаж оптических мышей вообще. Мелочь, но обидно
Б.г.> Я тоже пытался делать на этой штуке фигню, показывающую отклонение от направления на Солнце. На картинке она под номером 1
И как?
PS: Прототипы вполне себе работали, если что.
Б.г.> Там, в мыши, стоит несколько электронных компонентов.
Да знаю я. В 2001 ЕМНИМС году сидел в соседней комнате с ребятами, которые всё это дело потрошили и пытались сделать отечественную версию. Могло бы пойти в серию, но в виду неадекватного технического руководства проекта ...

А так была бы отечественная оптическая мышь, причём в самом начале продаж оптических мышей вообще. Мелочь, но обидно
Б.г.> Я тоже пытался делать на этой штуке фигню, показывающую отклонение от направления на Солнце. На картинке она под номером 1
И как?
PS: Прототипы вполне себе работали, если что.
Б.г.>> Я тоже пытался делать на этой штуке фигню, показывающую отклонение от направления на Солнце. На картинке она под номером 1
Sandro> И как?
Ну, я использовал в качестве объектива линзу от CD-ROM-а. С ней солнце получалось чуть-чуть не в фокусе, плюс, автоматическая регулировка яркости затягивала края, в результате, Солнце получалось кружком в 8 пикселей в диаметре. Притом, что там получалось поле зрения примерно 16 градусов, т.е. градус на пиксель. Поэтому был применён простой алгоритм - выравнивать так, чтобы сумма яркостей в 4 квадрантах была одинакова.
Sandro> PS: Прототипы вполне себе работали, если что.
Я с тех пор перешёл с AVR на ARM, но пока не воспроизвёл тот алгоритм. У меня вообще на АРМе пока не работает выход на рулевые машинки, у него PWM как-то сильно заумно устроен. Т.е. 3-мя я бы мог управлять легко, но, вроде как, 6 выходов есть, а управлять надо 4 машинками...
Sandro> И как?
Ну, я использовал в качестве объектива линзу от CD-ROM-а. С ней солнце получалось чуть-чуть не в фокусе, плюс, автоматическая регулировка яркости затягивала края, в результате, Солнце получалось кружком в 8 пикселей в диаметре. Притом, что там получалось поле зрения примерно 16 градусов, т.е. градус на пиксель. Поэтому был применён простой алгоритм - выравнивать так, чтобы сумма яркостей в 4 квадрантах была одинакова.
Sandro> PS: Прототипы вполне себе работали, если что.
Я с тех пор перешёл с AVR на ARM, но пока не воспроизвёл тот алгоритм. У меня вообще на АРМе пока не работает выход на рулевые машинки, у него PWM как-то сильно заумно устроен. Т.е. 3-мя я бы мог управлять легко, но, вроде как, 6 выходов есть, а управлять надо 4 машинками...
Б.г.> Поэтому был применён простой алгоритм - выравнивать так, чтобы сумма яркостей в 4 квадрантах была одинакова.
но если солнце пропадает из поля зрения, алгоритм не пашет.
зы, а вообще впечатлен, мысль использовать камеру мыши не приходила в голову )
но если солнце пропадает из поля зрения, алгоритм не пашет.
зы, а вообще впечатлен, мысль использовать камеру мыши не приходила в голову )
Б.г.> Ну, я использовал в качестве объектива линзу от CD-ROM-а. С ней солнце получалось чуть-чуть не в фокусе, плюс, автоматическая регулировка яркости затягивала края, в результате, Солнце получалось кружком в 8 пикселей в диаметре. Притом, что там получалось поле зрения примерно 16 градусов, т.е. градус на пиксель. Поэтому был применён простой алгоритм - выравнивать так, чтобы сумма яркостей в 4 квадрантах была одинакова.
Понятно. Могу рассказать про более подходящий алгоритм: метод взвешенных координат. Он даёт фактический угол (пока край матрицы не начинает резать гало, разумеется), и не сильно сложнее вычислительно, даже AVR хватит.
Проще, наверное, сразу на C'99, чем словами; тонна отладочной печати прилагается:
Час потратил, пока не вспомнил, как же эта проклятая астронавигация считается в первом приближении (можно лучше)
Б.г.> Я с тех пор перешёл с AVR на ARM, но пока не воспроизвёл тот алгоритм. У меня вообще на АРМе пока не работает выход на рулевые машинки, у него PWM как-то сильно заумно устроен. Т.е. 3-мя я бы мог управлять легко, но, вроде как, 6 выходов есть, а управлять надо 4 машинками...
А какой конкретно? STM32?
Понятно. Могу рассказать про более подходящий алгоритм: метод взвешенных координат. Он даёт фактический угол (пока край матрицы не начинает резать гало, разумеется), и не сильно сложнее вычислительно, даже AVR хватит.
Проще, наверное, сразу на C'99, чем словами; тонна отладочной печати прилагается:
#include <stdio.h>
#include <stdlib.h>
#include <memory.h>
#include <stdint.h>
#include <stdbool.h>
struct vector_2d
{
float x, y;
bool valid;
};
#define MATRIX_EDGE_LENGTH 16
#define MATRIX_CENTER ((MATRIX_EDGE_LENGTH - 1) / 2.0f)
// average brightness outside of these limits indicates a blind camera, if in paranoid mode
#define BLINDNESS_LOW_THRESHOLD 2
#define BLINDNESS_HIGH_THRESHOLD 200
bool halo_center(uint8_t pixels[], struct vector_2d *center, bool origin_at_matrix_center, bool paranoid)
{
struct {
int sums[2][MATRIX_EDGE_LENGTH]; // projected on x and y axes
int weighted[2];
} r;
int scale = 0;
memset(&r, 0, sizeof(r));
// project to axes
for (int i = 0; i < MATRIX_EDGE_LENGTH; i++)
{
for (int j = 0; j < MATRIX_EDGE_LENGTH; j++)
{
int pixel = pixels[i + j * MATRIX_EDGE_LENGTH];
r.sums[0][i] += pixel;
r.sums[1][j] += pixel;
scale += pixel;
}
}
for (int i = 0; i < 2; i++)
{
printf("\n%c ", i ? 'y' : 'x');
for (int j = 0; j < MATRIX_EDGE_LENGTH; j++)
{
r.weighted[i] += r.sums[i][j] * j;
printf("%3i ", r.sums[i][j]);
}
}
printf("\nWeighted x sum: %i, weighted y sum: %i, scale: %i\n ", r.weighted[0], r.weighted[1], scale);
int avg = scale / (MATRIX_EDGE_LENGTH * MATRIX_EDGE_LENGTH); // average brightness
if (paranoid && (avg < BLINDNESS_LOW_THRESHOLD || avg > BLINDNESS_HIGH_THRESHOLD))
{
// camera is probably blind, return default value and mark it as invalid
float default_offset = origin_at_matrix_center ? 0 : MATRIX_CENTER;
center->x = default_offset;
center->y = default_offset;
return center->valid = false;
}
float origin_offset = origin_at_matrix_center ? -MATRIX_CENTER : 0;
center->x = r.weighted[0] / (float)scale + origin_offset;
center->y = r.weighted[1] / (float)scale + origin_offset;
return center->valid = true;
}
// a simple test
void create_halo(uint8_t buf[], float center_x, float center_y, int halo_radius_sq)
{
printf("\n ");
for (int y = 0; y < MATRIX_EDGE_LENGTH; y++)
{
for (int x = 0; x < MATRIX_EDGE_LENGTH; x++)
{
float dx = x - center_x, dy = y - center_y;
float sdist_sq = halo_radius_sq - dx * dx - dy * dy;
if (sdist_sq < 0)
{
sdist_sq = 0;
}
else if (sdist_sq > 255)
{
sdist_sq = 255;
}
buf[x + y * MATRIX_EDGE_LENGTH] = sdist_sq;
printf("%2.0f ", sdist_sq);
}
printf("\n ");
}
}
void test_trial(float halo_x, float halo_y) {
uint8_t test[MATRIX_EDGE_LENGTH * MATRIX_EDGE_LENGTH] ;
int halo_radius_sq = MATRIX_EDGE_LENGTH * MATRIX_EDGE_LENGTH / 10;
printf("Testing a star halo detector (expected %f, %f)\n", halo_x, halo_y);
create_halo(test, halo_x, halo_y, halo_radius_sq);
struct vector_2d result;
halo_center(test, &result, false, false);
if (!result.valid)
{
printf("Uncertain data: %f, %f (camera is probably blind)\n", result.x, result.y);
} else {
printf("Found center at %f, %f\n", result.x, result.y);
}
printf("Offset is %f, %f\n------------------\n\n", result.x - halo_x, result.y - halo_y);
}
int main()
{
test_trial(8, 8);
test_trial(10, 11);
test_trial(10.1, 11.23);
test_trial(12, 12); // clipped by the camera's matrix edge
test_trial(14, 14); // nearly completely clipped by the camera's matrix edge
test_trial(15, 15); // almost completely clipped by the camera's matrix edge
return 0;
}
Час потратил, пока не вспомнил, как же эта проклятая астронавигация считается в первом приближении (можно лучше)
Б.г.> Я с тех пор перешёл с AVR на ARM, но пока не воспроизвёл тот алгоритм. У меня вообще на АРМе пока не работает выход на рулевые машинки, у него PWM как-то сильно заумно устроен. Т.е. 3-мя я бы мог управлять легко, но, вроде как, 6 выходов есть, а управлять надо 4 машинками...
А какой конкретно? STM32?
Sandro> А какой конкретно? STM32?
Нет, ARM7TDMI от Аналог Девайсез. Тому были причины. Сейчас часть из них уже отпали, но у меня есть запас кристаллов.
Нет, ARM7TDMI от Аналог Девайсез. Тому были причины. Сейчас часть из них уже отпали, но у меня есть запас кристаллов.
Б.г.> Нет, ARM7TDMI от Аналог Девайсез.
Mein Gott!!! Вот уж реликт. Но на управление ракетой его хватит более чем.
Если твоя машина всё ещё может снимать небо, то плз проверь мой код — я-то его проверял только в эмуляторе засветки, который включён в программу.
Mein Gott!!! Вот уж реликт. Но на управление ракетой его хватит более чем.
Если твоя машина всё ещё может снимать небо, то плз проверь мой код — я-то его проверял только в эмуляторе засветки, который включён в программу.
Б.г.>> Нет, ARM7TDMI от Аналог Девайсез.
Sandro> Mein Gott!!! Вот уж реликт. Но на управление ракетой его хватит более чем.
Sandro> Если твоя машина всё ещё может снимать небо, то плз проверь мой код — я-то его проверял только в эмуляторе засветки, который включён в программу.
Главное, что 5 лет назад мне пообещали в подарок "штучки три" спецстойких девайсов с такими ядрами. Так и не подарили, но я успел к этому чипу приторчаться.
Я экспериментировал не на небе, а на светодиодном фонаре. Причём, первая версия фонаря была набрана из светодиодов от мышей которые я, собственно, и разбирал на предмет извлечения из них сенсоров.

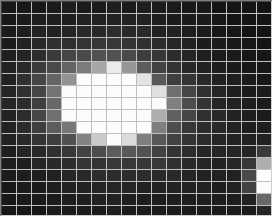
А вот картинка, которую даёт такой фонарь с 3 метров, когда его угловой размер близок к 0,5 градуса:
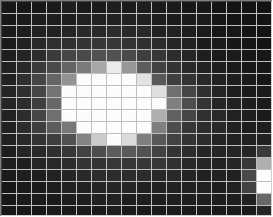
Солнце выглядит примерно так же, но через 2 сложенных вместе светофильтра К8х и Н4х (красный и нейтральный). Без них матрица перегружается, да и хроматическая аберрация однолинзового объектива дополнительно размывает картинку. Ещё солнце даёт больше бликов, я с ними боролся всякими блендами и диафрагмами из чёрной бумаги.
Но на солнце алгоритм отлаживать было крайне неудобно, поэтому я и экспериментировал с фонарём.
Где-то полгода назад стал делать новый фонарь, с 1 белым светодиодом на 1,5 ампера и объективом "Юпитер-3" в качестве коллиматора. Сделал оправку для объектива, из пластика, но он чересчур хорошо показывает внутреннюю структуру светодиода. Пытался бороться с этим рассеивателями. Но результаты противоречивые.
Короче, поэкспериментирую, но не обещаю, что скоро.
Sandro> Mein Gott!!! Вот уж реликт. Но на управление ракетой его хватит более чем.
Sandro> Если твоя машина всё ещё может снимать небо, то плз проверь мой код — я-то его проверял только в эмуляторе засветки, который включён в программу.
Главное, что 5 лет назад мне пообещали в подарок "штучки три" спецстойких девайсов с такими ядрами. Так и не подарили, но я успел к этому чипу приторчаться.
Я экспериментировал не на небе, а на светодиодном фонаре. Причём, первая версия фонаря была набрана из светодиодов от мышей
которые я, собственно, и разбирал на предмет извлечения из них сенсоров.
А вот картинка, которую даёт такой фонарь с 3 метров, когда его угловой размер близок к 0,5 градуса:
Солнце выглядит примерно так же, но через 2 сложенных вместе светофильтра К8х и Н4х (красный и нейтральный). Без них матрица перегружается, да и хроматическая аберрация однолинзового объектива дополнительно размывает картинку. Ещё солнце даёт больше бликов, я с ними боролся всякими блендами и диафрагмами из чёрной бумаги.
Но на солнце алгоритм отлаживать было крайне неудобно, поэтому я и экспериментировал с фонарём.
Где-то полгода назад стал делать новый фонарь, с 1 белым светодиодом на 1,5 ампера и объективом "Юпитер-3" в качестве коллиматора. Сделал оправку для объектива, из пластика, но он чересчур хорошо показывает внутреннюю структуру светодиода. Пытался бороться с этим рассеивателями. Но результаты противоречивые.
Короче, поэкспериментирую, но не обещаю, что скоро.
Б.г.>>> ...
Вопрос: какого минимального размера может быть спускаемый аппарат?
Грубо говоря, если у нас возвращается на Землю на второй космической флэшка, объект в пару кубических сантиметров объемом и в десяток грамм массой, каких массо-габаритов ей потребуется СА?
Вопрос: какого минимального размера может быть спускаемый аппарат?
Грубо говоря, если у нас возвращается на Землю на второй космической флэшка, объект в пару кубических сантиметров объемом и в десяток грамм массой, каких массо-габаритов ей потребуется СА?
Б.г.>>>> ...
Полл> Вопрос: какого минимального размера может быть спускаемый аппарат?
Полл> Грубо говоря, если у нас возвращается на Землю на второй космической флэшка, объект в пару кубических сантиметров объемом и в десяток грамм массой, каких массо-габаритов ей потребуется СА?
Минимум 10 сантиметров теплозащиты на "лбу" СА.
Можно погуглить про "беспарашютную посадку". Поискать, какого размера СА планировался у "Фобос-Грунта". Опять же, баллистическая капсула "Радуга".
Update: в русской википедии написано, что СА Ф-Г весил 7 кг.
Полл> Вопрос: какого минимального размера может быть спускаемый аппарат?
Полл> Грубо говоря, если у нас возвращается на Землю на второй космической флэшка, объект в пару кубических сантиметров объемом и в десяток грамм массой, каких массо-габаритов ей потребуется СА?
Минимум 10 сантиметров теплозащиты на "лбу" СА.
Можно погуглить про "беспарашютную посадку". Поискать, какого размера СА планировался у "Фобос-Грунта". Опять же, баллистическая капсула "Радуга".
Update: в русской википедии написано, что СА Ф-Г весил 7 кг.
Б.г.> Update: в русской википедии написано, что СА Ф-Г весил 7 кг.
Возможно не все знают. Но подробное описание ФОбос-Грунта от ИКИ и Лавки давно выложено в сеть
Возможно не все знают. Но подробное описание ФОбос-Грунта от ИКИ и Лавки давно выложено в сеть
Полл> Вопрос: какого минимального размера может быть спускаемый аппарат?
Правильней говорить про вес.
Потому как тонкостенная сфера из тугоплавкого металла лучший выбор. Плюс раскрутить потоком для создания подъёмной силы и равномерности нагрева.
Титановые сферы от ступеней почти целыми падают
Правильней говорить про вес.
Потому как тонкостенная сфера из тугоплавкого металла лучший выбор. Плюс раскрутить потоком для создания подъёмной силы и равномерности нагрева.
Титановые сферы от ступеней почти целыми падают


Дем> Титановые сферы от ступеней почти целыми падают
А какие условия для ПН внутри такого контейнера при спуске?
А какие условия для ПН внутри такого контейнера при спуске?

Дем>> Титановые сферы от ступеней почти целыми падают
Полл> А какие условия для ПН внутри такого контейнера при спуске?
Ну перегрузки надо считать в зависимости от траектории... Но ЕМНИП если горизонтально входить в атмосферу - единицы же.
Полл> А какие условия для ПН внутри такого контейнера при спуске?
Ну перегрузки надо считать в зависимости от траектории... Но ЕМНИП если горизонтально входить в атмосферу - единицы же.
Реклама Google — средство выживания форумов :)
Дем> Ну перегрузки надо считать в зависимости от траектории... Но ЕМНИП если горизонтально входить в атмосферу - единицы же.
"Союз" при входе по баллистической может получать до 30 g.
Но меня интересует сейчас температурные нагрузки.
"Союз" при входе по баллистической может получать до 30 g.
Но меня интересует сейчас температурные нагрузки.
Copyright © Balancer 1997..2020
Создано 26.02.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 26.02.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
