-
/brokescrew.jpg)
Конструкция ракет VI
Теги:
 Lioxa
Lioxa

Lioxa
втянувшийся
metero> Интереснее G-switch. Собираюсь- все времени нет - сделать такое : G-switch подключается к микроконтроллеру ( input capture) . Записьiваются за время полета состояния ключа в память. Считьiваются на земле и видим точно что произходит....
G-switch + микроконтроллер я уже даво сделал, штука очень надёжная и простая в изготовлении, я на такой прошлым летом летал. Сейчас эта связка на моём БРЭО стоит как резервная система выброса парашюта. Если кому надо говорите, выложу на странице. Думаю что такая связка даже проще чем на основе "магнитного сенсора".
G-switch + микроконтроллер я уже даво сделал, штука очень надёжная и простая в изготовлении, я на такой прошлым летом летал. Сейчас эта связка на моём БРЭО стоит как резервная система выброса парашюта. Если кому надо говорите, выложу на странице. Думаю что такая связка даже проще чем на основе "магнитного сенсора".
 инфо
инфо инструменты
инструменты metero
metero

Lioxa> G-switch + микроконтроллер я уже даво сделал, штука очень надёжная и простая в изготовлении, ...
Диаграма поведения в полете есть? Хочется без контроллера сделать. А вообще всякую информацию покажи , пригодится.
Диаграма поведения в полете есть? Хочется без контроллера сделать. А вообще всякую информацию покажи , пригодится.
http://airbase.ru/modelling/rockets/res/users/metero/index.html
 Serge77
Serge77

metero> Вопрос к Serge77: я внимательно смотрел твои системьi парашута, но мне не совсем ясно как именно - после открьiвании головки или расчленения фюзеляжа- работает раскритие парашута, засчет чего именно он раскривается?
Резинка "переламывает" корпус, парашют просто выпадает из отсека сам по себе, его ничто не выталкивает, но и ничто не держит. Хотя резинка всё-таки помогает выйти парашюту, он ведь к ней привязан, а резинка сокращается и тянет стропы, частично вынимает парашют, остальное доделывает набегающий поток воздуха.
Это может достаточно надёжно работать только с очень неглубокими отсеками в корпусной и головной части. Парашют там должен помещаться очень свободно, без никакого трения.
Резинка "переламывает" корпус, парашют просто выпадает из отсека сам по себе, его ничто не выталкивает, но и ничто не держит. Хотя резинка всё-таки помогает выйти парашюту, он ведь к ней привязан, а резинка сокращается и тянет стропы, частично вынимает парашют, остальное доделывает набегающий поток воздуха.
Это может достаточно надёжно работать только с очень неглубокими отсеками в корпусной и головной части. Парашют там должен помещаться очень свободно, без никакого трения.
Lioxa
втянувшийся
Lioxa>> G-switch + микроконтроллер я уже даво сделал, штука очень надёжная и простая в изготовлении, ...
metero> Диаграма поведения в полете есть? Хочется без контроллера сделать. А вообще всякую информацию покажи , пригодится. [»]
Интересно это как ???? "Диаграма поведения в полете"
G-switch на старте разамкнут , потом когда движок догорает G-switch замыкается , включается Timer
, через N секунд бум, пшик или ещё чтото ....... и всё. Ето подтверждено мною эксперементально много раз. Да и законов физики никто не отменял
metero> Диаграма поведения в полете есть? Хочется без контроллера сделать. А вообще всякую информацию покажи , пригодится. [»]
Интересно это как ???? "Диаграма поведения в полете"
G-switch на старте разамкнут , потом когда движок догорает G-switch замыкается , включается Timer
, через N секунд бум, пшик или ещё чтото ....... и всё. Ето подтверждено мною эксперементально много раз. Да и законов физики никто не отменял
Lioxa> Интересно это как ???? "Диаграма поведения в полете"
Наверно, не умею обьяснить что имею ввиду. Когда сделаю. напишу. Система с таймером ясна, другое имею ввиду.
Наверно, не умею обьяснить что имею ввиду. Когда сделаю. напишу. Система с таймером ясна, другое имею ввиду.
http://airbase.ru/modelling/rockets/res/users/metero/index.html
А.С.> такой акселерометр имеет право на существование
Права, конечно, никто не отменял. Грузик на пружинке описан в книжке, которая есть в нашей библиотеке.
Права, конечно, никто не отменял. Грузик на пружинке описан в книжке, которая есть в нашей библиотеке.

Lioxa>> Интересно это как ???? "Диаграма поведения в полете"
metero> Наверно, не умею обьяснить что имею ввиду. Когда сделаю. напишу. Система с таймером ясна, другое имею ввиду. [»]
Понятно, что ты имеешь ввиду.
Но с одним контактом получится малоинформативно.
Вот если бы хотя бы три, да еще наложить их замыкание на живой график высота/время, было бы над чем работать.
Но если уж так, то проще аналоговый интегратор на готовом акселераторе сделать.
metero> Наверно, не умею обьяснить что имею ввиду. Когда сделаю. напишу. Система с таймером ясна, другое имею ввиду. [»]
Понятно, что ты имеешь ввиду.
Но с одним контактом получится малоинформативно.
Вот если бы хотя бы три, да еще наложить их замыкание на живой график высота/время, было бы над чем работать.
Но если уж так, то проще аналоговый интегратор на готовом акселераторе сделать.
 a_centaurus
a_centaurus

Ето подтверждено мною эксперементально много раз. Да и законов физики никто не отменял
Права, конечно, никто не отменял
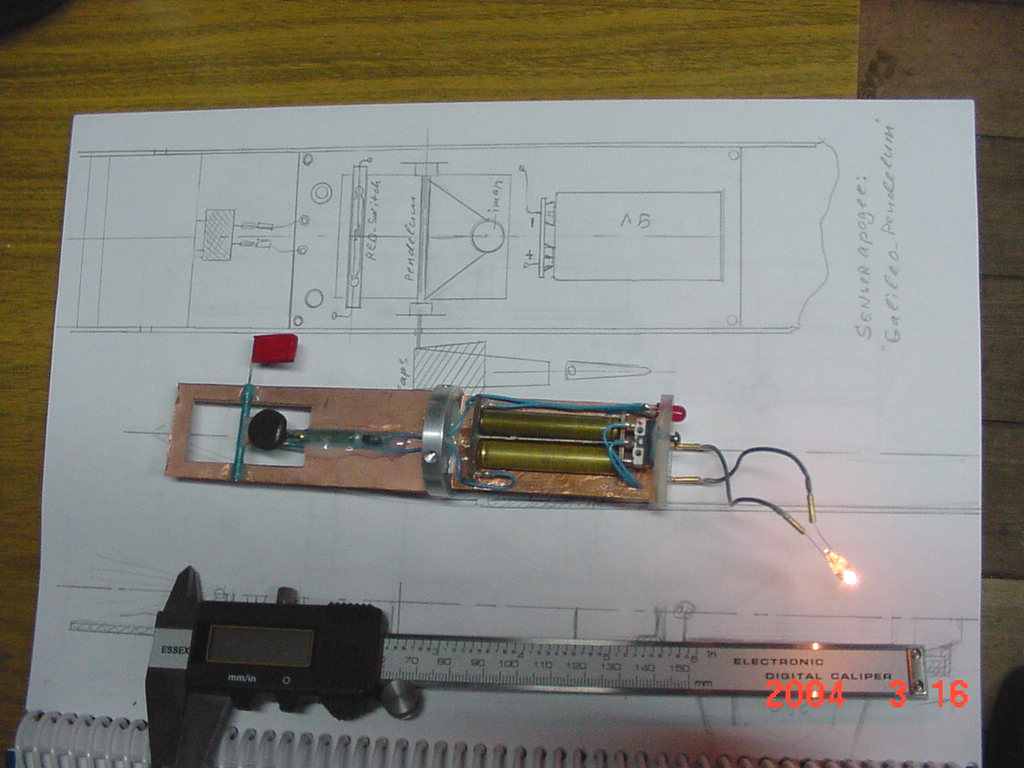
В том числе и авторского, "lioхa"... Схему пиротехнического устройства с таймером и дизайн акселерометра на G-switch (герконе) ты получил от меня. Добавка бортового контроллера сути не меняет. Так что хотя бы из вежливости называй первоисточники... Для справки, первый герконный датчик на устройстве калибровки звёздного датчика автором был сделан 25 лет назад... Последний, из этой же серии, на калибровочном устройстве многоспектральной камеры спутника SAC_C (Арг.-NASA) О таком устройстве я неоднократно писал на Форуме. Но напомню и другой дизайн на герконе. Это маятниковый аэродинамический датчик апогея... Из макета и эскиза видны детали... Небольшой флапс удерживает магнит в нижнем положении и не даёт ему двигаться по инерции вверх после окончания работы мотора... При достижения апогея при небольших поперечных ускорениях магнит достигает геркона и активирует пиротехнику. Устройство было апробировано в импровизированном туннеле с регулируемым потоком азота...Но до ракеты так дело и не дошло... Может кто возмётся попробовать?
Прикреплённые файлы:

Foto 2. Маятниковый герконный датчик
Прикреплённые файлы:
a_centaurus> При достижения апогея при небольших поперечных ускорениях магнит достигает геркона и активирует пиротехнику.
Всё-таки не очень понятно, как это должно работать. Можешь подробнее объяснить, под действием каких сил и в какой именно момент происходит срабатывание?
И рисунок не очень понятен.
Всё-таки не очень понятно, как это должно работать. Можешь подробнее объяснить, под действием каких сил и в какой именно момент происходит срабатывание?
И рисунок не очень понятен.
В свое время Harry предлагал подобньiй магнитньiй с герконом датчик апогея, бьiла схемка и фото. Дома посмотрю и покажу.
http://airbase.ru/modelling/rockets/res/users/metero/index.html
Основных сил там две: Сила тяжести, приложенная к магниту-грузику, укреплённому на коротком маятниковом подвесе, направлена вниз и он находится в безразличном равновесии в нижней мёртвой точке. В верхней, находится геркон. В полёте сила аэродинамического сопротивления продолжает удерживает флапс и соединённый с ним маятниковый подвес с магнитом-грузиком в нижней мёртвой точке, хотя сила инерции и сила реакции опоры вызывают вращающие моменты, которые без противодействия аэродинамической силы, должны были бы довести магнит до верхней м.т. (трение пренебрежимо мало) и замкнуть контакты геркона. При подлёте к апогею drag ослабевает и магнит при любом поперечном ускорении (направление неважно из-за трапецевидной формы подвеса), например при заваливании ракеты в направлении Земли на малых скоростях приобретает вращательный момент, который приближает его к в.м.т., а магнитная сила (появившеяся вблизи железных выводов геркона) добавляет скорости... На такой датчик есть некие ограничения по калибру ракеты, поскольку он должен быть больше диаметра вращения магнита (у меня он был ограничен 33 мм), ну и необходимым расчётом формы и площади флапса... У меня флапс имел размеры 2х1 см, толстый симметричный профиль и был сделан из бальзы.
Теперь понятно. У Накки сделано более надёжно, потому что флажок непосредственно замыкает микропереключатель, т.е. не нужно надеяться на неопределённые боковые ускорения.
 Джи-джи
Джи-джи

metero> С грузиком уже проходили ")
Ага. И отказались, так я понимаю. Ну что ж. Притащил я тут пяток книжек по гироскопам. Попробую разобраться: так ли страшен черт, как его малютки .
Ага. И отказались, так я понимаю. Ну что ж. Притащил я тут пяток книжек по гироскопам. Попробую разобраться: так ли страшен черт, как его малютки
.
Теперь понятно. У Накки сделано более надёжно, потому что флажок непосредственно замыкает микропереключатель, т.е. не нужно надеяться на неопределённые боковые ускорения.
Не врубился значит. Или нарочно? Обьясняю. У Накки флапс установлен ПЕРПЕНДИКУЛЯРНО ПОТОКУ и включает microswitch ТАЙМЕРА на старте ракеты, после того как сила драга превысит жёсткость пружины микрика... В моей конструкции флапс установлен ПАРАЛЛЕЛьНО ПОТОКУ, чтобы удержать магнит на подвесе маятника от РАННЕГО СТРАБАТЫВАНИЯ и в в.м.т. замыкает НАПРЯМУЮ контакты батареи (3 вольта), соединённой с резистором. То есть выигрыш в весе налицо. А ускорения в НЕСТАБИЛИЗИРОВАННОМ полёте ракеты вблизи апогея в перпендикулярных направлениях ВСЕГДА ВОЗНИКАЮТ... Ракета ведь наклоняет нос... А даже если она плохо стабилизирована и просядет назад "на хвосте", маятник всё равно получит вращательный импульс благодаря инерции, ведь площади флапса на малой скорости недостаточно, чтобы скомпенсировать динамический разгон маятникового подвеса... Магнит ведь весит несколько граммов, а флапс миллиграммы...В этом то и заключается независимость такого датчика от строгой стабилизации и ориентации ракеты...
удалено
Это сообщение редактировалось 24.04.2005 в 20:27
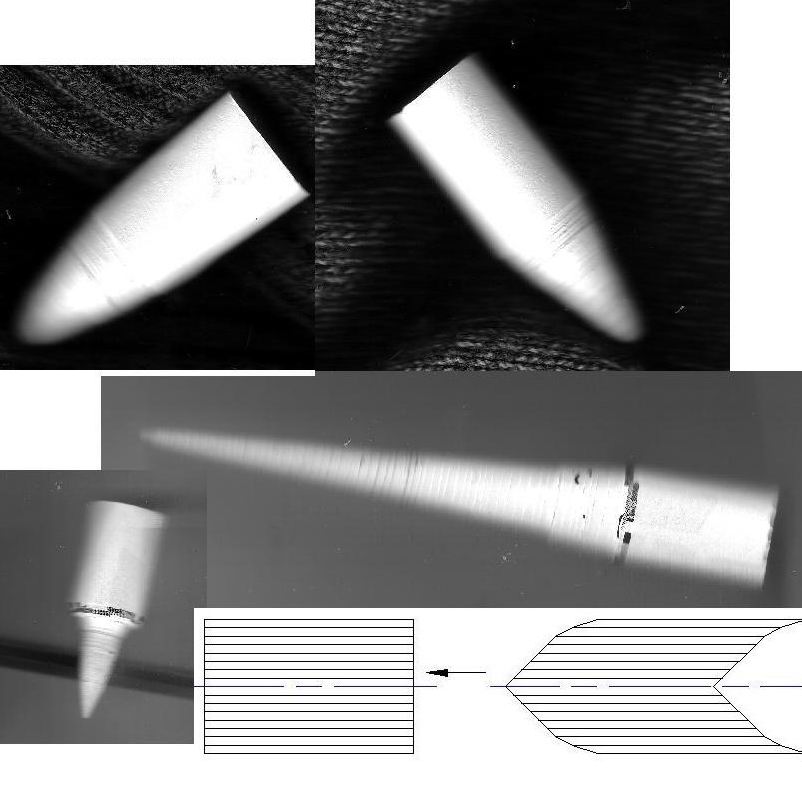
Делаю ракету диаметром по корпусу 17мм. Сделал к ней обтекатель за 5 минут (может, кто и делал так, но мне ни на одном сайте ракетомоделистов не попадалась такая технология – поэтому опишу). Нарезал обычный лист офисной бумаги на 6 полосок шириной 30мм. Склеил их в одну длинную полосу. И скатал в рулон, на подобии, рулона туалетной бумаги. Последний виток прихватил ПВА. Потом аккуратно сдвинул центр рулона вдоль оси. Получился конус-обтекатель. Обмазал снаружи ПВА, высушил, зашкурил. Все. (можно и эпоксидкой пропитать ). Причем так можно делать обтекатели ЛЮБОЙ формы. Демонстрирую на фотографии (точнее прямо отсканировал их) Это один и тот же обтекатель и конусный и оживальный и пр. Просто я его по разному «раскрывал». Если вдруг не получилось – отрывается последний проклеенный виток и перематывается все, по новой Диаметр обтекателя тоже само собой регулируется элементарно. Не надо даже плотно наматывать бумагу (и даже лучше этого не делать). Так во первых лучше сдвигать слои бумаги, а во вторых потом (после сдвига) можно легко за кончик обтекателя «завернуть» его улучшив плотность намотки (как говорится бумага все стерпит).
Прикреплённые файлы:
Джи-джи> Делаю ракету диаметром по корпусу 17мм. Сделал к ней обтекатель за 5 минут
Класс!
А чего ракета такая тонкая? Ты и не заметишь, куда она полетит.
Класс!
А чего ракета такая тонкая? Ты и не заметишь, куда она полетит.

Блин, так просто и при очевидно, а никто не додумался (по крайней мере я тоже о таких обтекателях никогда не читал). Для одноразовых ракет наверное идеальный вариант.
(по крайней мере я тоже о таких обтекателях никогда не читал). Для одноразовых ракет наверное идеальный вариант.
1
Почему для одноразовых? Нормальный обтекатель, прочный. Может быть немного тяжеловат, но не тяжелее деревянного.
Такой обтекатель можно использовать как оправку для намотки тонкого композитного обтекателя.
Такой обтекатель можно использовать как оправку для намотки тонкого композитного обтекателя.
В смысле что если вдруг для каких-то мирных целей понадобится одноразовая ракета в количестве нескольких штук, трудно придумать что-то простое, быстрое и при этом хорошее. Если для многоразовой ракеты имеет смысл подумать о композитном обтекателе или из бальсы выточить, то для одноразовой такое никто не будет делать. То что этот обтекатель хорош и для многоразовой ракеты не оптимизированной по массе, я согласен.
P.S. - И не спрашивайте зачем кому-то куча одноразовых ракет.
P.S. - И не спрашивайте зачем кому-то куча одноразовых ракет.
1

можно еще сделать форму обтекателя из свечки, я просто от руки вставлял свечку в разжатый на максимум патрон дрели - она достаточно плотно держится.
Затем обтачивал по картонному шаблону часовой отверткой как резцом.
Затем натянуь на форму капроновый чулок или калготки и завязать. Промазать связующим - эпоксидкой например. Получится прекрасный обтекатель.
Можно сделать на форме цилндрический участок меньшего диаметра для вставки в корпус ракеты, тогда нужно сделать проточку-углубление перед цилиндрической частью и перетянуть ниткой в этом месте капрон. Но форму придется выплавлять.
Затем обтачивал по картонному шаблону часовой отверткой как резцом.
Затем натянуь на форму капроновый чулок или калготки и завязать. Промазать связующим - эпоксидкой например. Получится прекрасный обтекатель.
Можно сделать на форме цилндрический участок меньшего диаметра для вставки в корпус ракеты, тогда нужно сделать проточку-углубление перед цилиндрической частью и перетянуть ниткой в этом месте капрон. Но форму придется выплавлять.
Serge77> А чего ракета такая тонкая? Ты и не заметишь, куда она полетит. [»]
Эта ракета под двигатели диаметром топливной шашки 14мм. Такие двигатели буду отливать сегодня - ракета под них и делается. Она не одноразовая, а «полноценная. Хоть и маленькая. Делал ее очень легкой. Даже стабилизаторы были из птичьих перьев. Правда, подумав, я их потом все таки оторвал и заменил, на обычные. Если эксперимент с топливом удастся, то потом буду делать и больше.
Эта ракета под двигатели диаметром топливной шашки 14мм. Такие двигатели буду отливать сегодня - ракета под них и делается. Она не одноразовая, а «полноценная. Хоть и маленькая. Делал ее очень легкой. Даже стабилизаторы были из птичьих перьев. Правда, подумав, я их потом все таки оторвал и заменил, на обычные. Если эксперимент с топливом удастся, то потом буду делать и больше.
И на стабилизаторы пойдет капрон с эпоксидкой.
Джи-джи> Эта ракета под двигатели диаметром топливной шашки 14мм.
Какой конструкции двигатели? На сколько топлива?
Какой конструкции двигатели? На сколько топлива?
Copyright © Balancer 1997..2018
Создано 20.12.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 20.12.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
