-
/1247616-240px-apollo12visor.jpg)
Полёт американцев на Луну, где найти вменяемые объяснения спорных моментов?
Теги:
 7-62
7-62

А с чего вы решили что это было на режиме вертикальной посадки?
неужели посадка была "горизонтальная" ??? :o
пробег большой по бетонке? ;D
 инфо
инфо инструменты
инструменты Старый
Старый
неужели посадка была "горизонтальная" ??? :o
пробег большой по бетонке? ;D
Вы что тут делаете?
Тем кто не решил задачку про пыль не решить задачку про посадку.
Так что ждите что шурави ответит.
Старый Ламер
еще избранное из Старого ...
Хм... все человечетсво! Вот согласно последних данных, большенство американской молодежи не смогли на карте указать Ирак и Афганистан ;D Да что там Ирак - не все знают где находится штат Нью-Йорк ;D ;D Президент Буш в свое время спросил: как правильно пишется - Ирак или Иран? ;D
Скажем почти три миллиарда жителей Китая, Индии, Пакистана и соседей глубоко имели Америку с ее полетами/не полетами. Там в деревнях грамотность ниже плинтуса.
Их мнение ув. Старый откуда черпал? Может в Пакистане референдум проводили!? Или в Бирме?") Или Монгольские чабаны на партсобрании резолюцию в поддержку НАСА голосовали!?
Или Монгольские чабаны на партсобрании резолюцию в поддержку НАСА голосовали!?
Возьмем центральную Африку. Чад, Заир, Нигерия... Какое НАСА, какая Луна, какие полеты! Там люди читать-писать не умеют, племена тутси с луками и стрелами воюют с племенами бхуту.
А может колумбийские крестьяне, что выращивают героин, рассудят нас со Старым относительно лунной пыли или устройства взлетной ступени ЛМ!? ;D
Да что там Колумбия. Вы поезжайте в Жмеринку. Нет - вы поезжайте и спросите, как говорил (почти) Паниковский. Для них Винница - центр мира. Какая луна!? але гараж!
"Все человечество" - это горстка ангосаксонгских экспертов, да жменя "скептиков" полуеврейской национальности.
Даже ортодоксальным равинам и сионистам глубоко до задницы Луна, космос, Аполло... им главное молиться и бузить с арабами. Тем наоборот. И так весь мир.
И только неправильный сионист Пустынский (7-40) вместо того, чтобы ехать поднимать кибуцное движение ;D смотрит в небо через свою трубу и флеймит тут по чем свет ;D
и банда его пришибленная - Старый, БЕЛЛ, ЮК... общее ощущение - свита Воланда ;D ;D
Вы ребята иногда посмотрите на себя со стороны. Более всего вы похожи на "герболайфщиков" - теже приемы: вопросы-ответы, подсадные, обращение в свою "веру"...
Вы герболайфом раньше не торговали!?
Ваш Аполло - самый крутой герболайф ХХ века ;D ;D ;D
Вы знаете, это представляет себе всё человечество. Вы очевидно первый человек на Земле у которого это вызвало подозрение.
Хм... все человечетсво! Вот согласно последних данных, большенство американской молодежи не смогли на карте указать Ирак и Афганистан ;D Да что там Ирак - не все знают где находится штат Нью-Йорк ;D ;D Президент Буш в свое время спросил: как правильно пишется - Ирак или Иран? ;D
Скажем почти три миллиарда жителей Китая, Индии, Пакистана и соседей глубоко имели Америку с ее полетами/не полетами. Там в деревнях грамотность ниже плинтуса.
Их мнение ув. Старый откуда черпал? Может в Пакистане референдум проводили!? Или в Бирме?
Или Монгольские чабаны на партсобрании резолюцию в поддержку НАСА голосовали!?Возьмем центральную Африку. Чад, Заир, Нигерия... Какое НАСА, какая Луна, какие полеты! Там люди читать-писать не умеют, племена тутси с луками и стрелами воюют с племенами бхуту.
А может колумбийские крестьяне, что выращивают героин, рассудят нас со Старым относительно лунной пыли или устройства взлетной ступени ЛМ!? ;D
Да что там Колумбия. Вы поезжайте в Жмеринку. Нет - вы поезжайте и спросите, как говорил (почти) Паниковский. Для них Винница - центр мира. Какая луна!? але гараж!
"Все человечество" - это горстка ангосаксонгских экспертов, да жменя "скептиков" полуеврейской национальности.
Даже ортодоксальным равинам и сионистам глубоко до задницы Луна, космос, Аполло... им главное молиться и бузить с арабами. Тем наоборот. И так весь мир.
И только неправильный сионист Пустынский (7-40) вместо того, чтобы ехать поднимать кибуцное движение ;D смотрит в небо через свою трубу и флеймит тут по чем свет ;D
и банда его пришибленная - Старый, БЕЛЛ, ЮК... общее ощущение - свита Воланда ;D ;D
Вы ребята иногда посмотрите на себя со стороны. Более всего вы похожи на "герболайфщиков" - теже приемы: вопросы-ответы, подсадные, обращение в свою "веру"...
Вы герболайфом раньше не торговали!?
Ваш Аполло - самый крутой герболайф ХХ века ;D ;D ;D
Совершенно очевидно что Иран и Афганистан никогда не были на карте?еще избранное из Старого ...
Хм... все человечетсво! Вот согласно последних данных, большенство американской молодежи не смогли на карте указать Ирак и Афганистан ;D
А уж Нью-Йорк - само собой.Да что там Ирак - не все знают где находится штат Нью-Йорк ;D ;D
Вот такие с интересом и слушают шурави и Прохожего.Скажем почти три миллиарда жителей Китая, Индии, Пакистана и соседей глубоко имели Америку с ее полетами/не полетами. Там в деревнях грамотность ниже плинтуса.
Вы же видели - на форуме тоже такой есть.Их мнение ув. Старый откуда черпал?
Старый Ламер

Господа, вы что! ???
Не путайте показания авиагоризонта и скорость, высоту, обороты!
Это командный прибор. Пытаясь выдержать горизонт по подсказке, вы неизменно раскачаете летательный аппарат. Не верите мне, спросите Вуду, возможно ли вне видимости горизонта подобным образом пилотировать, особенно вблизи поверхности.
«Цитата : шурави - 2006-05-02, 20:08:59
-В этом случае автоматика всего лишь компенсирует статическую неустойчивость.
Кстати, вы забыли основной режим - "Демпфер" или как его ещё называют "Совмещённое управление", в котоом автопилот работает параллельно с ручным управлением улучшая динамические характеристики летательного аппарата - устойчивость и управляемость».
Я в принципе об этом и говорил, может излишне упростил. :-
Этот режим основной для вертолётов.
«А вертолётчиков тренируют садиться по приборам в штатном режиме? Ну, так чтоб отрабатывать именно этот способ посадки как основной»?
Нет. Увы, современное оборудование не обеспечивает достаточную безопасность (для посадок вне аэродрома).
Не путайте показания авиагоризонта и скорость, высоту, обороты!
Это командный прибор. Пытаясь выдержать горизонт по подсказке, вы неизменно раскачаете летательный аппарат. Не верите мне, спросите Вуду, возможно ли вне видимости горизонта подобным образом пилотировать, особенно вблизи поверхности.
«Цитата : шурави - 2006-05-02, 20:08:59
-В этом случае автоматика всего лишь компенсирует статическую неустойчивость.
Кстати, вы забыли основной режим - "Демпфер" или как его ещё называют "Совмещённое управление", в котоом автопилот работает параллельно с ручным управлением улучшая динамические характеристики летательного аппарата - устойчивость и управляемость».
Я в принципе об этом и говорил, может излишне упростил. :-
Этот режим основной для вертолётов.
«А вертолётчиков тренируют садиться по приборам в штатном режиме? Ну, так чтоб отрабатывать именно этот способ посадки как основной»?
Нет. Увы, современное оборудование не обеспечивает достаточную безопасность (для посадок вне аэродрома).
Всем спасибо, прощавайте. Устал я толочь воду в ступе.
Самоудаляюсь.
Самоудаляюсь.
 7-40
7-40

Господа, вы что! ???
Не путайте показания авиагоризонта и скорость, высоту, обороты!
Это командный прибор. Пытаясь выдержать горизонт по подсказке, вы неизменно раскачаете летательный аппарат. Не верите мне, спросите Вуду, возможно ли вне видимости горизонта подобным образом пилотировать, особенно вблизи поверхности.
Никто не выравнивал горизонт по подсказке. Это делал автопилот. Сколько раз Вам нужно повторить, что всю стабилизацию выполнял автопилот? Сколько раз это нужно сказать, чтобы Вы, наконец, поняли?
«А вертолётчиков тренируют садиться по приборам в штатном режиме? Ну, так чтоб отрабатывать именно этот способ посадки как основной»?
Нет. Увы, современное оборудование не обеспечивает достаточную безопасность (для посадок вне аэродрома).
Значит, не зря у астронавтов окошко было.
")
Значит, не зря у астронавтов окошко было.
[/quote]
На вертолёте их гораздо больше, но увы.
Так автопилот стабилизировал, или был ручной режим?
(на участке зависание, выбор места посадки, прилунение)?
Всем спасибо, прощавайте. Устал я толочь воду в ступе.
Самоудаляюсь.
Самоудаляюсь.
Значит, не зря у астронавтов окошко было.
На вертолёте их гораздо больше, но увы.
Вам и много окошек не помогает?
Так автопилот стабилизировал, или был ручной режим?
Автопилот стабилизировал всё время. Вручную стабилизировать такую ракету невозможно в принципе, наверное - она неустойчива. Ну или очень, очень сложно. Стабилизация ВСЕГДА выполняется автоматом. Роль пилота была - выбор места посадки (в пределах некоторого ограниченного района) и прилунение.
На вертолёте их гораздо больше, но увы.
Вам и много окошек не помогает?
Автопилот стабилизировал всё время. Вручную стабилизировать такую ракету невозможно в принципе, наверное - она неустойчива. Ну или очень, очень сложно. Стабилизация ВСЕГДА выполняется автоматом. Роль пилота была - выбор места посадки (в пределах некоторого ограниченного района) и прилунение.
Когда в "молоке" мало что поможет. Когда видно не далее метра. Кстати в этом случае пилот весь в приборах а "правак" ищет землю.
Вы хотите сказать что астронавт управляет главным двигателем (вектором тяги), а автоматика двигателями стабилизации?
Всем спасибо, прощавайте. Устал я толочь воду в ступе.
Самоудаляюсь.
Самоудаляюсь.

Вы хотите сказать что астронавт управляет главным двигателем (вектором тяги), а автоматика двигателями стабилизации?
Читайте: http://epizodsspace.testpilot.ru/bibl/raketostr3/2-4.html
A Lannister always pays his debts.
Когда в "молоке" мало что поможет. Когда видно не далее метра. Кстати в этом случае пилот весь в приборах а "правак" ищет землю.
Ну уж Конраду-то было видно подалее метра, благо, туманов на Луне не водится.
Вы хотите сказать что астронавт управляет главным двигателем (вектором тяги), а автоматика двигателями стабилизации?
Я хочу сказать, что астронавт указывает, куда и как лететь; а всё управление исполнительными органами (двигателями и карданом) лежит на автомате.
Господа, вы что! ???
Пытаясь выдержать горизонт по подсказке, вы неизменно раскачаете летательный аппарат.
А кто выдерживал горизонт по подсказке? :o :o :o
Старый Ламер
У американцев было с точностью до наоборот. Может потому что оба пилота были одинаково опытными. Вы им это простите?Когда в "молоке" мало что поможет. Когда видно не далее метра. Кстати в этом случае пилот весь в приборах а "правак" ищет землю.
При чём тут мы? У вас претензии к нам или к НАСА?Вы хотите сказать что астронавт управляет главным двигателем (вектором тяги), а автоматика двигателями стабилизации?
Старый Ламер
Я боюсь что шурави не асилит. Ему ссылку на этот текст уже давали но он не смог прочитать (или понять прочитаное)
Поэтому, шурави, лично для вас выделяю некоторые места:
2.3. РУЧНОЕ УПРАВЛЕНИЕ КОРАБЛЕМ APOLLO
На всех этапах полета корабля Apollo, а также в критических и аварийных ситуациях управление кораблем может осуществляться астронавтами вручную. Система ручного управления обеспечивает стабилизацию полета по курсу, координированные развороты, команды на ориентацию и перемещение корабля в пространстве.
Отличительная особенность ручного управления лунного корабля в сравнении с другими летательными аппаратами состоит в том, что его динамические характеристики изменяются в широких пределах.
Ручное управление лунным кораблем астронавты осуществляют с помощью: рукояток ориентации и перемещения, бортовой ЭЦВМ, ЦАП, пульта управления и шарового индикатора полета.
(Для тех кто в чугунном вертолёте специально подчёркиваю: РУЧНОЕ управление осуществляется С ПОМОЩЬЮ АВТОПИЛОТА.)
Управление ориентацией, перемещением с использованием ЖРД РСУ осуществляется с помощью бортовой ЭЦВМ лунного корабля по программам ЦАП. Ручное управление ориентацией использует эти же коды ЦАП, которые занимают 11% памяти бортовой ЭЦВМ.
Режим «автоматического управления» устанавливается, когда осуществляется посадка с работающим ЖРД посадочной ступени, требующая автоматического выполнения маневров. Однако на этом режиме экипаж с помощью рукоятки может корректировать полет корабля по оси Х, пересиливая ЦАП. Во время выполнения ЦАП программы Р-64, отклоняя рукояткой управления корабль по тангажу и крену, дискретно изменяют угол наклона траектории и направление полета, ведя корабль к выбранному месту посадки. При этом ЦАП поддерживает оптимальный режим полета.
Если селектор ЦАП установлен на режим «ручное управление», астронавты с помощью рукоятки могут управлять кораблем относительно всех трех осей
Следующая страница.
http://epizodsspace.narod.ru/bibl/raketostr3/2-4.html
Режим работы цифрового автопилота лунного корабля
Активный участок траектории
Стабилизация заданной ориентации
Автоматическое управление траекторией полета
Ручное управление ориентацией
Автоматическое маневрирование относительно оси Х с ручной коррекцией
Ручное маневрирование
Автоматическая посадка на Луну
Ручное управление посадкой на Луну
А вот вам, шурави, описание самой посадки:
http://epizodsspace.narod.ru/bibl/raketostr3/4-3.html
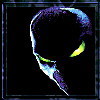
Вот схема входа корабля в посадочный коридор:
Обратите внимание: наверху схема показывающая что при этом видно в окно
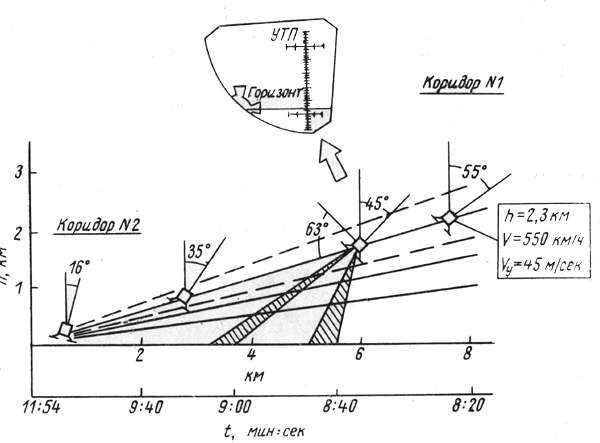
Вот схема входа в окончательный коридор:
Обратите внимание - сверху на рисунке окна буквами "тп" показана точка посадки.
На индикаторе нанесённом на окно астронавты видят куда сядет корабль на автопилоте и если место им не нравится орудуя ручкой они могут перенацелить корабль на новое место. После отпускания ручки автопилот автоматически посадит корабль уже на это новое место.
Прошу отметить как на самом деле наклонена траектория, корабль идёт фактически по глиссаде и только на высоте 50 метров начинает гасить горизонтальную скорость. Это для тех кто любит поюродствовать на тему "а что, посадка была горизонтальной?" Обратите внимание какой у корабля при этом (на высоте 50 метров) угол тангажа. Это для тех кто любит поюродствовать про технику пилотирования.
Когда лунный корабль, снизился до высоты H=140 м, Н. Армстронг увидел, что автопилот ведет корабль на посадку в кратер размерами с футбольное поле, усеянный крупными камнями до 3 м в поперечнике. Н. Армстронг выключил автоматическую программу Р-64 и перевел бортовую ЭЦВМ на полуавтоматическую программу Р-66; в соответствии с этой программой ЖРД посадочной ступени управляется автоматически, чтобы вертикальная скорость снижения была 1 м/сек, а ЖРД РСУ управляются полностью вручную, что обеспечивает необходимую величину горизонтальной составляющей скорости. С помощью ЖРД РСУ Н. Армстронг обеспечил горизонтальную составляющую скорости 3-4,5 м/сек и лунный корабль благополучно перелетел опасный для посадки кратер.
Н. Армстронг имел возможность переключить бортовую ЭЦВМ на программу Р-67. В этом случае управление вектором тяги посадочного ЖРД и ЖРД РСУ полностью производится вручную, а бортовая ЭЦВМ лишь поддерживает вертикальную скорость снижения на уровне 0,3 м/сек. Н. Армстронг не воспользовался программой Р-67, так как она затягивает процесс посадки.
Перелетев опасный кратер и выбрав для посадки подходящее место, Н. Армстронг затормозил горизонтальную скорость, одновременно осуществляя вертикальное снижение корабля;
Старый Ламер
Штатный режим посадки лунного корабля ПОЛНОСТЬЮ АВТОМАТИЧЕСКИЙ, без участия человека.
Астронавт может вмешаться и указать автопилоту другое место посадки куда автопилот тоже ПОЛНОСТЬЮ АВТОМАТИЧЕСКИ, САМ посадит корабль.
И только если в поле зрения нет подходящих мест то астронавт может включить ручное управление и летя куда хочет выбрать место. При этом автопилот управляет углами и вертикальной скоростью.
Шурави, на вашем вертолёте был ТАКОЙ автопилот? Ну давайте, заявите что этого не может быть никогда потому что на вертолётах вы таких автопилотов не видели.
Астронавт может вмешаться и указать автопилоту другое место посадки куда автопилот тоже ПОЛНОСТЬЮ АВТОМАТИЧЕСКИ, САМ посадит корабль.
И только если в поле зрения нет подходящих мест то астронавт может включить ручное управление и летя куда хочет выбрать место. При этом автопилот управляет углами и вертикальной скоростью.
Шурави, на вашем вертолёте был ТАКОЙ автопилот? Ну давайте, заявите что этого не может быть никогда потому что на вертолётах вы таких автопилотов не видели.
Старый Ламер
Шурави, на вашем вертолёте был ТАКОЙ автопилот? Ну давайте, заявите что этого не может быть никогда потому что на вертолётах вы таких автопилотов не видели.
Ну, Старый... Откуда на вертолетах компьютеры? Так что щас шурави (который, как помните, не сразу поверил, что на аполлоне ДИСС был) заявит, что раз у него нынче компьютеров нет, то в 69-м на Аполлонах их никак быть не могло, следовательно, совершенно очевидно, что...
A Lannister always pays his debts.
Это сообщение редактировалось 05.05.2006 в 11:11
 Вуду
Вуду

"Все человечество" - это горстка ангосаксонгских экспертов, да жменя "скептиков" полуеврейской национальности.
Даже ортодоксальным равинам и сионистам глубоко до задницы Луна, космос, Аполло... им главное молиться и бузить с арабами. Тем наоборот. И так весь мир.
И только неправильный сионист Пустынский (7-40) вместо того, чтобы ехать поднимать кибуцное движение ;D смотрит в небо через свою трубу и флеймит тут по чем свет ;D
и банда его пришибленная - Старый, БЕЛЛ, ЮК... общее ощущение - свита Воланда ;D ;D
-
Прохожий с улицы, не постесняйся, поведай, хлопче, хто ж ты по национальности будэшь?!
 ;D
;D
“The only good Indian is a dead Indian”

RAZAR
втянувшийся
-Прохожий с улицы, не постесняйся, поведай, хлопче, хто ж ты по национальности будэшь?!
А этот вопрос имеет какое-либо отношение к обсуждению посадки американцев на Луну?
пысы: Какие последствия могут быть, если окажется, что американцы на Луне - небыли?
Ну, Старый... Откуда на вертолетах компьютеры? Так что щас шурави (который, как помните, не сразу поверил, что на аполлоне ДИСС был) заявит, что раз у него нынче компьютеров нет, то в 69-м на Аполлонах их никак быть не могло, следовательно, совершенно очевидно, что...
Ясный перец. И ещё долго будет рассказывать что на вертолётах нет таких автопилотов которые сами по себе без участия лётчика сажают вертолёт на указаное им место.
Старый Ламер
-Прохожий с улицы, не постесняйся, поведай, хлопче, хто ж ты по национальности будэшь?!
Та ж хлопец з Киiву и будэт
Дивись: http://forums.airbase.ru/index.php/topic,32953.msg576606.html#msg576606
A Lannister always pays his debts.
А этот вопрос имеет какое-либо отношение к обсуждению посадки американцев на Луну?
А почему вы не задали свой вопрос в ответ на это:
?"Все человечество" - это горстка ангосаксонгских экспертов, да жменя "скептиков" полуеврейской национальности.
И только неправильный сионист Пустынский (7-40) вместо того, чтобы ехать поднимать кибуцное движение
Да вобщемто никаких. Скажут "надо было чтоб завалить Империю Зла".пысы: Какие последствия могут быть, если окажется, что американцы на Луне - небыли?
Старый Ламер
Прохожий, "всё человечество" это те кто закончил среднюю школу. В средней школе этот вопрос изучается наряду с таблицей умножения и законами Ньютона. Но как вы знаете некоторые оспаривают и законы Ньтона (зовут - Иссаак) и даже таблицу умножения. Что уж тут говорить об Аполлоне...
Старый Ламер
RAZAR
втянувшийся
А почему вы не задали свой вопрос в ответ на это:?
Тема интересная ... я за ней с интересом смотрю ... а вопрос задал - на последний оффтопик ...
Тема интересная ... я за ней с интересом смотрю ... а вопрос задал - на последний оффтопик ...
То есть вопрос о национальности историков космонавтики вы посчитали вполне уместным, а о национальности опровергателя - ни-ни?
Старый Ламер
RAZAR
втянувшийся
То есть вопрос о национальности историков космонавтики вы посчитали вполне уместным, а о национальности опровергателя - ни-ни?
Я считаю интересным любое обсуждение относящаеся к "Полету американцев на Луну" ... И не вижу никакой информативности в обсуждениях типа: "ты какой национальности?" - независимо от того кто это пишет ...
Copyright © Balancer 1997..2018
Создано 14.04.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.04.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}
{kind=link}