 hcube
hcube

 инфо
инфо инструменты
инструменты Serge77
Serge77




 Xan
Xan

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
А.С.> http://z2.foto.rambler.ru/public/suvorow_/19/number1/number1.jpg
А.С.> Как-то так.
А.С.> Длина отсека системы управления в нынешей инкарнации - около 300 мм, двигательного отсека - около 600 мм, парашют площадью 1,45 м2 отлично помещается в обтекатель.
Эээ... народ, а ничего, что у вас управляемая ракета воздух-воздух получается? По голове не настучат?
А.С.> Как-то так.
А.С.> Длина отсека системы управления в нынешей инкарнации - около 300 мм, двигательного отсека - около 600 мм, парашют площадью 1,45 м2 отлично помещается в обтекатель.
Эээ... народ, а ничего, что у вас управляемая ракета воздух-воздух получается? По голове не настучат?



Возможно дурацкий вопрос, но...
А почему для стабилицазии не используются системы с широкоульной линзой на конце ракеты и камерой/фотоматрицей для получения кординат пятна для точного определеняи положения солнца? Просто, первое, что мне в голову пришло при прочтении этой темы, это что-то вроде дверного глазка обтекателе+камера от сотового. "Глазок" даёт картинку практический всей небесной сферы от горизонта до горизонта. Дальше выделяется самая яркая область - луна/солнце и по ней корректируется гироскоп или сразу ведерживается вертикаль. Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.
А почему для стабилицазии не используются системы с широкоульной линзой на конце ракеты и камерой/фотоматрицей для получения кординат пятна для точного определеняи положения солнца? Просто, первое, что мне в голову пришло при прочтении этой темы, это что-то вроде дверного глазка обтекателе+камера от сотового. "Глазок" даёт картинку практический всей небесной сферы от горизонта до горизонта. Дальше выделяется самая яркая область - луна/солнце и по ней корректируется гироскоп или сразу ведерживается вертикаль. Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.


А.С.>> Как-то так.
RocKI> Схема "утка" для ракеты не есть хорошо. Как говорил мой шеф, даже утки летают по нормальной схеме.")
Да, я знаю. В варианте с перекисным ЖРД схема была нормальная. А тут - ну некуда там рулевые машинки запихивать... Но перекисной ЖРД надо теперь делать заново, с нуля, и перспективы не очень ясны. А СУ - ну, не то, чтобы почти готова, но всё на мази, б/м движется и б/м в правильную сторону.
RocKI> Схема "утка" для ракеты не есть хорошо. Как говорил мой шеф, даже утки летают по нормальной схеме.
Да, я знаю. В варианте с перекисным ЖРД схема была нормальная. А тут - ну некуда там рулевые машинки запихивать... Но перекисной ЖРД надо теперь делать заново, с нуля, и перспективы не очень ясны. А СУ - ну, не то, чтобы почти готова, но всё на мази, б/м движется и б/м в правильную сторону.
А.С.> Но перекисной ЖРД надо теперь делать заново, с нуля, и перспективы не очень ясны.
А в чём проблема? У вас же вроде почти всё работало на стенде.
А в чём проблема? У вас же вроде почти всё работало на стенде.

Sap> Возможно дурацкий вопрос, но...
Sap> А почему для стабилицазии не используются системы с широкоульной линзой на конце ракеты и камерой/фотоматрицей для получения кординат пятна для точного определеняи положения солнца? Просто, первое, что мне в голову пришло при прочтении этой темы, это что-то вроде дверного глазка обтекателе+камера от сотового. "Глазок" даёт картинку практический всей небесной сферы от горизонта до горизонта. Дальше выделяется самая яркая область - луна/солнце и по ней корректируется гироскоп или сразу ведерживается вертикаль.
Это возможный путь. Но дьявол, как известно, в деталях...
Sap> Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.
Угу, особенно, с учётом дисторсии пересчитывать координаты, блин... Там не только вычислительная мощность требуется, а ещё и нетривиальная математическая подготовка... Нет, я предпочитаю, чтоб у датчика Солнца было поле зрения небольшое, а в его пределах - всё линейно, т.к. углы мало отличаются от своих синусов и тангенсов. А гироскопы, как показали мои и NikSR эксперименты, достаточно точны, чтобы не промахнуться таким датчиком мимо солнца. К тому же, в случае маленькой матрицы (мышиного сенсора) сильно облегчается общение с датчиком - можно по I2C, и нет проблемы не успеть. А "обычная" видеокамера - это 640х480х30=9,2 мегабайта в секунду, из которых 90% - пустая информация, которую, тем не менее, всё равно нужно просматривать.
Sap> А почему для стабилицазии не используются системы с широкоульной линзой на конце ракеты и камерой/фотоматрицей для получения кординат пятна для точного определеняи положения солнца? Просто, первое, что мне в голову пришло при прочтении этой темы, это что-то вроде дверного глазка обтекателе+камера от сотового. "Глазок" даёт картинку практический всей небесной сферы от горизонта до горизонта. Дальше выделяется самая яркая область - луна/солнце и по ней корректируется гироскоп или сразу ведерживается вертикаль.
Это возможный путь. Но дьявол, как известно, в деталях...
Sap> Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.
Угу, особенно, с учётом дисторсии пересчитывать координаты, блин... Там не только вычислительная мощность требуется, а ещё и нетривиальная математическая подготовка... Нет, я предпочитаю, чтоб у датчика Солнца было поле зрения небольшое, а в его пределах - всё линейно, т.к. углы мало отличаются от своих синусов и тангенсов. А гироскопы, как показали мои и NikSR эксперименты, достаточно точны, чтобы не промахнуться таким датчиком мимо солнца. К тому же, в случае маленькой матрицы (мышиного сенсора) сильно облегчается общение с датчиком - можно по I2C, и нет проблемы не успеть. А "обычная" видеокамера - это 640х480х30=9,2 мегабайта в секунду, из которых 90% - пустая информация, которую, тем не менее, всё равно нужно просматривать.
А.С.>> Но перекисной ЖРД надо теперь делать заново, с нуля, и перспективы не очень ясны.
Serge77> А в чём проблема? У вас же вроде почти всё работало на стенде.
Ну, стенд работал, да. Двигатель - нет. Нужно было уменьшать критику в 10 раз по площади и расход перекиси во столько же раз. Или делать всё заново.
Можно, конечно, было попробовать очистить перекись от стабилизаторов, но это, IMHO, даже более хлопотно, чем переходить на новую камеру и новый катализаторный пакет.
Serge77> А в чём проблема? У вас же вроде почти всё работало на стенде.
Ну, стенд работал, да. Двигатель - нет. Нужно было уменьшать критику в 10 раз по площади и расход перекиси во столько же раз. Или делать всё заново.
Можно, конечно, было попробовать очистить перекись от стабилизаторов, но это, IMHO, даже более хлопотно, чем переходить на новую камеру и новый катализаторный пакет.
Sap>> Возможно дурацкий вопрос, но...
...
Sap>> Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.
А.С.> Угу, особенно, с учётом дисторсии пересчитывать координаты, блин... Там не только вычислительная мощность требуется, а ещё и нетривиальная математическая подготовка... Нет, я предпочитаю, чтоб у датчика Солнца было поле зрения небольшое, а в его пределах - всё линейно, т.к. углы мало отличаются от своих синусов и тангенсов. А гироскопы, как показали мои и NikSR эксперименты, достаточно точны, чтобы не промахнуться таким датчиком мимо солнца. К тому же, в случае маленькой матрицы (мышиного сенсора) сильно облегчается общение с датчиком - можно по I2C, и нет проблемы не успеть. А "обычная" видеокамера - это 640х480х30=9,2 мегабайта в секунду, из которых 90% - пустая информация, которую, тем не менее, всё равно нужно просматривать.
Дык, а зачем математика-то?! Проще, либо непосредственно перед стартом откалибровать, либо заранее. СОбственно, нужно скорректировать-то неточность выставления зенита и всё. А дальше, только поддерживать одинкаовое расстояние от пятна (Солнце) до зенита на протяжении полёт — будет строгая (в меру точности оптики и разрешения камеры) вертикаль. 2 Мегабайта там конечно есть, но современные контроллеры могут перелопачивать до несколких сотен мегабайт.
...
Sap>> Этот путь, конечно, требует применения довольно мощного процессора, но сейчас есть всякие Atmel ARM7S/ARM9S с минимальным потребелнием и достаточной большой производительности при минимальный габаритах и приемлемой цене.
А.С.> Угу, особенно, с учётом дисторсии пересчитывать координаты, блин... Там не только вычислительная мощность требуется, а ещё и нетривиальная математическая подготовка... Нет, я предпочитаю, чтоб у датчика Солнца было поле зрения небольшое, а в его пределах - всё линейно, т.к. углы мало отличаются от своих синусов и тангенсов. А гироскопы, как показали мои и NikSR эксперименты, достаточно точны, чтобы не промахнуться таким датчиком мимо солнца. К тому же, в случае маленькой матрицы (мышиного сенсора) сильно облегчается общение с датчиком - можно по I2C, и нет проблемы не успеть. А "обычная" видеокамера - это 640х480х30=9,2 мегабайта в секунду, из которых 90% - пустая информация, которую, тем не менее, всё равно нужно просматривать.
Дык, а зачем математика-то?! Проще, либо непосредственно перед стартом откалибровать, либо заранее. СОбственно, нужно скорректировать-то неточность выставления зенита и всё. А дальше, только поддерживать одинкаовое расстояние от пятна (Солнце) до зенита на протяжении полёт — будет строгая (в меру точности оптики и разрешения камеры) вертикаль. 2 Мегабайта там конечно есть, но современные контроллеры могут перелопачивать до несколких сотен мегабайт.
Sap> Дык, а зачем математика-то?!
Как это - зачем? как пересчитывать угол отклонения солнца от заданного направления в угол отклонения рулей? Ведь иначе нет гарантии, что стабилизация будет работать. Либо автоколебания, либо недорегулирование.
Sap> Проще, либо непосредственно перед стартом откалибровать, либо заранее. СОбственно, нужно скорректировать-то неточность выставления зенита и всё. А дальше, только поддерживать одинкаовое расстояние от пятна (Солнце) до зенита на протяжении полёт — будет строгая (в меру точности оптики и разрешения камеры) вертикаль.
Направление на Солнце даёт только два угла ориентации, если солнце не в зените, это не вертикаль, а только постоянный угол между осью ракеты и направлением на солнце. Вокруг направления на солнце ракета может свободно вращаться. Для того, чтобы это исключить, и нужен пьезогироскоп, ось чувствительности которого совпадает с направлением на Солнце.
Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Так, собственно, я и планирую это делать...
Как это - зачем? как пересчитывать угол отклонения солнца от заданного направления в угол отклонения рулей? Ведь иначе нет гарантии, что стабилизация будет работать. Либо автоколебания, либо недорегулирование.
Sap> Проще, либо непосредственно перед стартом откалибровать, либо заранее. СОбственно, нужно скорректировать-то неточность выставления зенита и всё. А дальше, только поддерживать одинкаовое расстояние от пятна (Солнце) до зенита на протяжении полёт — будет строгая (в меру точности оптики и разрешения камеры) вертикаль.
Направление на Солнце даёт только два угла ориентации, если солнце не в зените, это не вертикаль, а только постоянный угол между осью ракеты и направлением на солнце. Вокруг направления на солнце ракета может свободно вращаться. Для того, чтобы это исключить, и нужен пьезогироскоп, ось чувствительности которого совпадает с направлением на Солнце.
Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Так, собственно, я и планирую это делать...
Это сообщение редактировалось 13.05.2009 в 13:41
hcube> Эээ... народ, а ничего, что у вас управляемая ракета воздух-воздух получается?
Скорее, земля-воздух... А ещё точнее - земля-земля
hcube> По голове не настучат?
Постараюсь избежать
Скорее, земля-воздух... А ещё точнее - земля-земля
hcube> По голове не настучат?
Постараюсь избежать
Это сообщение редактировалось 13.05.2009 в 14:38
А.С.> Направление на Солнце даёт только два угла ориентации, если солнце не в зените, это не вертикаль, а только постоянный угол между осью ракеты и направлением на солнце. Вокруг направления на солнце ракета может свободно вращаться. Для того, чтобы это исключить, и нужен пьезогироскоп, ось чувствительности которого совпадает с направлением на Солнце.
А.С.> Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Смысл в удержании угла между солнцем и зенитом (между солнцем и некоторой заранее определённой осью). Причём, этот угол просто запоминается на старте и поддерживается в полёте. Никакой математики - только обратные связи. Можно конечно всё это сугубо экспериментально откалибровать - посветить с разных углов лазерной указкой и интерполировать таблицы пересчёта - для выставления гироскопов дочность будет достаточная. Математика в таких вещах вредна.
Была бы это большая ракета я бы сказал что нужно четыре панорамных глазка на четыре стороны вывести (с углом 45' к горизонту) и дальше для стабилизации выбирать тот, где Солнце ближе в центру. А стабилизироваться только обратными связями и удержанием пятна. Собственно, так многие вещи и летают - несколько комплектов специальной оптики и фотоэлектрических пластина для определения пятна + калибровка.
А.С.> Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Смысл в удержании угла между солнцем и зенитом (между солнцем и некоторой заранее определённой осью). Причём, этот угол просто запоминается на старте и поддерживается в полёте. Никакой математики - только обратные связи. Можно конечно всё это сугубо экспериментально откалибровать - посветить с разных углов лазерной указкой и интерполировать таблицы пересчёта - для выставления гироскопов дочность будет достаточная. Математика в таких вещах вредна.
Была бы это большая ракета я бы сказал что нужно четыре панорамных глазка на четыре стороны вывести (с углом 45' к горизонту) и дальше для стабилизации выбирать тот, где Солнце ближе в центру. А стабилизироваться только обратными связями и удержанием пятна. Собственно, так многие вещи и летают - несколько комплектов специальной оптики и фотоэлектрических пластина для определения пятна + калибровка.
А.С.>> Направление на Солнце даёт только два угла ориентации, если солнце не в зените, это не вертикаль, а только постоянный угол между осью ракеты и направлением на солнце. Вокруг направления на солнце ракета может свободно вращаться. Для того, чтобы это исключить, и нужен пьезогироскоп, ось чувствительности которого совпадает с направлением на Солнце.
А.С.>> Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Sap> Смысл в удержании угла между солнцем и зенитом
Ракета не знает, где в небе зенит. Она знает, где солнце, и где центр экрана.
Sap> (между солнцем и некоторой заранее определённой осью). Причём, этот угол просто запоминается на старте и поддерживается в полёте.
При этом "свободный" конец угла может вращаться вокруг направления на Солнце.
Sap> Никакой математики - только обратные связи.
Так стабилизации не будет. Будет либо недорегулирование, либо перерегулирование. Надо точно знать, насколько нужно отклонить рули - и когда вернуть их в нейтраль.
Sap> Можно конечно всё это сугубо экспериментально откалибровать - посветить с разных углов лазерной указкой и интерполировать таблицы пересчёта - для выставления гироскопов дочность будет достаточная. Математика в таких вещах вредна.
Гм. А зачем тогда изучать дифференциальные уравнения?
Sap> Была бы это большая ракета я бы сказал что нужно четыре панорамных глазка на четыре стороны вывести (с углом 45' к горизонту) и дальше для стабилизации выбирать тот, где Солнце ближе в центру. А стабилизироваться только обратными связями и удержанием пятна. Собственно, так многие вещи и летают - несколько комплектов специальной оптики и фотоэлектрических пластина для определения пятна + калибровка.
Если бы на небе было два Солнца одновременно, по ним отлично можно было бы стабилизироваться. Поскольку солнце на небе одно, то нужен ещё какой-то репер. Это может быть, например, магнитное поле земли. Или пьезогироскоп.
Нормальная астронавигация всегда осуществляется по двум светилам, т.к. одно даёт лишь два угла ориентации, а не три. Но делать ЗВЁЗДНЫЙ датчик, или даже хотя бы ЛУННЫЙ я не чувствую в себе моральных сил.
А.С.>> Самый простой случай - Солнце приблизительно на горизонте (т.е. раннее утро или вечер). Тогда ось чувствительности гироскопа горизонтальна. В противном случае нужно вводить преобразование координат, а это матричные вычисления.
Sap> Смысл в удержании угла между солнцем и зенитом
Ракета не знает, где в небе зенит. Она знает, где солнце, и где центр экрана.
Sap> (между солнцем и некоторой заранее определённой осью). Причём, этот угол просто запоминается на старте и поддерживается в полёте.
При этом "свободный" конец угла может вращаться вокруг направления на Солнце.
Sap> Никакой математики - только обратные связи.
Так стабилизации не будет. Будет либо недорегулирование, либо перерегулирование. Надо точно знать, насколько нужно отклонить рули - и когда вернуть их в нейтраль.
Sap> Можно конечно всё это сугубо экспериментально откалибровать - посветить с разных углов лазерной указкой и интерполировать таблицы пересчёта - для выставления гироскопов дочность будет достаточная. Математика в таких вещах вредна.
Гм. А зачем тогда изучать дифференциальные уравнения?
Sap> Была бы это большая ракета я бы сказал что нужно четыре панорамных глазка на четыре стороны вывести (с углом 45' к горизонту) и дальше для стабилизации выбирать тот, где Солнце ближе в центру. А стабилизироваться только обратными связями и удержанием пятна. Собственно, так многие вещи и летают - несколько комплектов специальной оптики и фотоэлектрических пластина для определения пятна + калибровка.
Если бы на небе было два Солнца одновременно, по ним отлично можно было бы стабилизироваться. Поскольку солнце на небе одно, то нужен ещё какой-то репер. Это может быть, например, магнитное поле земли. Или пьезогироскоп.
Нормальная астронавигация всегда осуществляется по двум светилам, т.к. одно даёт лишь два угла ориентации, а не три. Но делать ЗВЁЗДНЫЙ датчик, или даже хотя бы ЛУННЫЙ я не чувствую в себе моральных сил.
А.С.> Гм. А зачем тогда изучать дифференциальные уравнения?
Для воспитания упорства в неприспособленном организме
А.С.> Нормальная астронавигация всегда осуществляется по двум светилам, т.к. одно даёт лишь два угла ориентации, а не три. Но делать ЗВЁЗДНЫЙ датчик, или даже хотя бы ЛУННЫЙ я не чувствую в себе моральных сил.
Датчик земли ? ИК-горизонт ?
Извини Андрей, я понимаю, что это злая шутка.
Для воспитания упорства в неприспособленном организме
А.С.> Нормальная астронавигация всегда осуществляется по двум светилам, т.к. одно даёт лишь два угла ориентации, а не три. Но делать ЗВЁЗДНЫЙ датчик, или даже хотя бы ЛУННЫЙ я не чувствую в себе моральных сил.
Датчик земли ? ИК-горизонт ?
Извини Андрей, я понимаю, что это злая шутка.
А.С.>> Нормальная астронавигация всегда осуществляется по двум светилам, т.к. одно даёт лишь два угла ориентации, а не три. Но делать ЗВЁЗДНЫЙ датчик, или даже хотя бы ЛУННЫЙ я не чувствую в себе моральных сил.
timochka> Датчик земли ? ИК-горизонт ?
Для любительской реализации лучше всего подходят трёхосный магнитометр и пьезогироскопы. С учётом таймфреймов точность оба метода обеспечивают примерно одинаковую. На длительных таймфреймах магнитометр, конечно, точнее. Но там без сложной математики не обойтись На быстрых разворотах (10 град/с и быстрее) пьезогироскоп точнее.
timochka> Датчик земли ? ИК-горизонт ?
Для любительской реализации лучше всего подходят трёхосный магнитометр и пьезогироскопы. С учётом таймфреймов точность оба метода обеспечивают примерно одинаковую. На длительных таймфреймах магнитометр, конечно, точнее. Но там без сложной математики не обойтись
На быстрых разворотах (10 град/с и быстрее) пьезогироскоп точнее.
timochka>> Датчик земли ? ИК-горизонт ?
А.С.> Для любительской реализации лучше всего подходят трёхосный магнитометр и пьезогироскопы. С учётом таймфреймов точность оба метода обеспечивают примерно одинаковую. На длительных таймфреймах магнитометр, конечно, точнее. Но там без сложной математики не обойтись На быстрых разворотах (10 град/с и быстрее) пьезогироскоп точнее.
Кстати да! Видел проект 3-х осного магнетометра на контроллере. Парень на его основе вычислял положение камеры и стоил большой снимок на основе снимков с движущейся камеры.
А почему там сложная математика? Вроде компоненты вектора в углы пересчитываются довольно быстро. Контроллер справляется.
А.С.> Для любительской реализации лучше всего подходят трёхосный магнитометр и пьезогироскопы. С учётом таймфреймов точность оба метода обеспечивают примерно одинаковую. На длительных таймфреймах магнитометр, конечно, точнее. Но там без сложной математики не обойтись
На быстрых разворотах (10 град/с и быстрее) пьезогироскоп точнее.Кстати да! Видел проект 3-х осного магнетометра на контроллере. Парень на его основе вычислял положение камеры и стоил большой снимок на основе снимков с движущейся камеры.
А почему там сложная математика? Вроде компоненты вектора в углы пересчитываются довольно быстро. Контроллер справляется.
timochka> А почему там сложная математика? Вроде компоненты вектора в углы пересчитываются довольно быстро. Контроллер справляется.
1. Раз или два в секунду - да, справляется. Угловые скорости определять - нет.
2. Алгоритмы проще для объекта, который не движется, а только крутится. С камерой это приближение хорошо работает, с ракетой - нет.
А в случае, когда, хм, реально нужна коррекция для пьезогироскопа, силовую линию, хм, нельзя считать прямой. Уж точно нельзя наклон считать постоянным... уже на трассе в 100 км направление меняется на градус (и это если мы в спокойном месте, а не под Курском).
1. Раз или два в секунду - да, справляется. Угловые скорости определять - нет.
2. Алгоритмы проще для объекта, который не движется, а только крутится. С камерой это приближение хорошо работает, с ракетой - нет.
А в случае, когда, хм, реально нужна коррекция для пьезогироскопа, силовую линию, хм, нельзя считать прямой. Уж точно нельзя наклон считать постоянным... уже на трассе в 100 км направление меняется на градус (и это если мы в спокойном месте, а не под Курском).
timochka>> А почему там сложная математика? Вроде компоненты вектора в углы пересчитываются довольно быстро. Контроллер справляется.
А.С.> 1. Раз или два в секунду - да, справляется. Угловые скорости определять - нет.
А.С.> 2. Алгоритмы проще для объекта, который не движется, а только крутится. С камерой это приближение хорошо работает, с ракетой - нет.
А.С.> А в случае, когда, хм, реально нужна коррекция для пьезогироскопа, силовую линию, хм, нельзя считать прямой. Уж точно нельзя наклон считать постоянным... уже на трассе в 100 км направление меняется на градус (и это если мы в спокойном месте, а не под Курском).
Да, я все время забываю про твои масштабы. Для маленьких (до 4-5 км высоты) ракет и силовую линию можно считать прямой и требования к точности ниже.
Тогда можно настраивать датчики перед пуском. Магнитный датчик поворачивать так, что-бы проекция вектора на плоскость датчика была нулевой, солнечный тоже доворачивать аналогичным макаром. Вводить уставку на текущий угол - магнитный вектор к направлению на солнце. А функция управлящих воздействий от входных параметров в табличном виде заранее обсчитанная на "большом компе". Тогда контроллера должно хватить в силу малых масштабов.
А.С.> 1. Раз или два в секунду - да, справляется. Угловые скорости определять - нет.
А.С.> 2. Алгоритмы проще для объекта, который не движется, а только крутится. С камерой это приближение хорошо работает, с ракетой - нет.
А.С.> А в случае, когда, хм, реально нужна коррекция для пьезогироскопа, силовую линию, хм, нельзя считать прямой. Уж точно нельзя наклон считать постоянным... уже на трассе в 100 км направление меняется на градус (и это если мы в спокойном месте, а не под Курском).
Да, я все время забываю про твои масштабы. Для маленьких (до 4-5 км высоты) ракет и силовую линию можно считать прямой и требования к точности ниже.
Тогда можно настраивать датчики перед пуском. Магнитный датчик поворачивать так, что-бы проекция вектора на плоскость датчика была нулевой, солнечный тоже доворачивать аналогичным макаром. Вводить уставку на текущий угол - магнитный вектор к направлению на солнце. А функция управлящих воздействий от входных параметров в табличном виде заранее обсчитанная на "большом компе". Тогда контроллера должно хватить в силу малых масштабов.
timochka> Для маленьких (до 4-5 км высоты) ракет и силовую линию можно считать прямой и требования к точности ниже.
Ну, да, но на 5 км - это 50 секунд подъёма, вряд ли больше, а 50 секунд пьезогироскоп можно и не корректировать. Общее отклонение траектории не превысит при этом 0,7 градуса (отклонение оси нарастает со временем, но скорость-то после окончания работы двигателя падает, и влияние верхнего участка траектории на общее отклонение уменьшается. При этом уход верхней точки составит меньше ста метров, считая уход солнечного датчика равным уходу гироскопа (на самом деле, меньше). Ясно, что это вполне приемлемое отклонение. Даже если парашют открывать на высоте 300 метров, снос ветром будет того же порядка, что и промах СУ.
timochka> Тогда можно настраивать датчики перед пуском. Магнитный датчик поворачивать так, что-бы проекция вектора на плоскость датчика была нулевой, солнечный тоже доворачивать аналогичным макаром. Вводить уставку на текущий угол - магнитный вектор к направлению на солнце. А функция управлящих воздействий от входных параметров в табличном виде заранее обсчитанная на "большом компе". Тогда контроллера должно хватить в силу малых масштабов.
Да, тогда можно обойтись одноосным магнитометром на базе любимого KZM10A1 или как его там? только снабдить его приличным усилителем.
Ну, да, но на 5 км - это 50 секунд подъёма, вряд ли больше, а 50 секунд пьезогироскоп можно и не корректировать. Общее отклонение траектории не превысит при этом 0,7 градуса (отклонение оси нарастает со временем, но скорость-то после окончания работы двигателя падает, и влияние верхнего участка траектории на общее отклонение уменьшается. При этом уход верхней точки составит меньше ста метров, считая уход солнечного датчика равным уходу гироскопа (на самом деле, меньше). Ясно, что это вполне приемлемое отклонение. Даже если парашют открывать на высоте 300 метров, снос ветром будет того же порядка, что и промах СУ.
timochka> Тогда можно настраивать датчики перед пуском. Магнитный датчик поворачивать так, что-бы проекция вектора на плоскость датчика была нулевой, солнечный тоже доворачивать аналогичным макаром. Вводить уставку на текущий угол - магнитный вектор к направлению на солнце. А функция управлящих воздействий от входных параметров в табличном виде заранее обсчитанная на "большом компе". Тогда контроллера должно хватить в силу малых масштабов.
Да, тогда можно обойтись одноосным магнитометром на базе любимого KZM10A1 или как его там?
только снабдить его приличным усилителем.
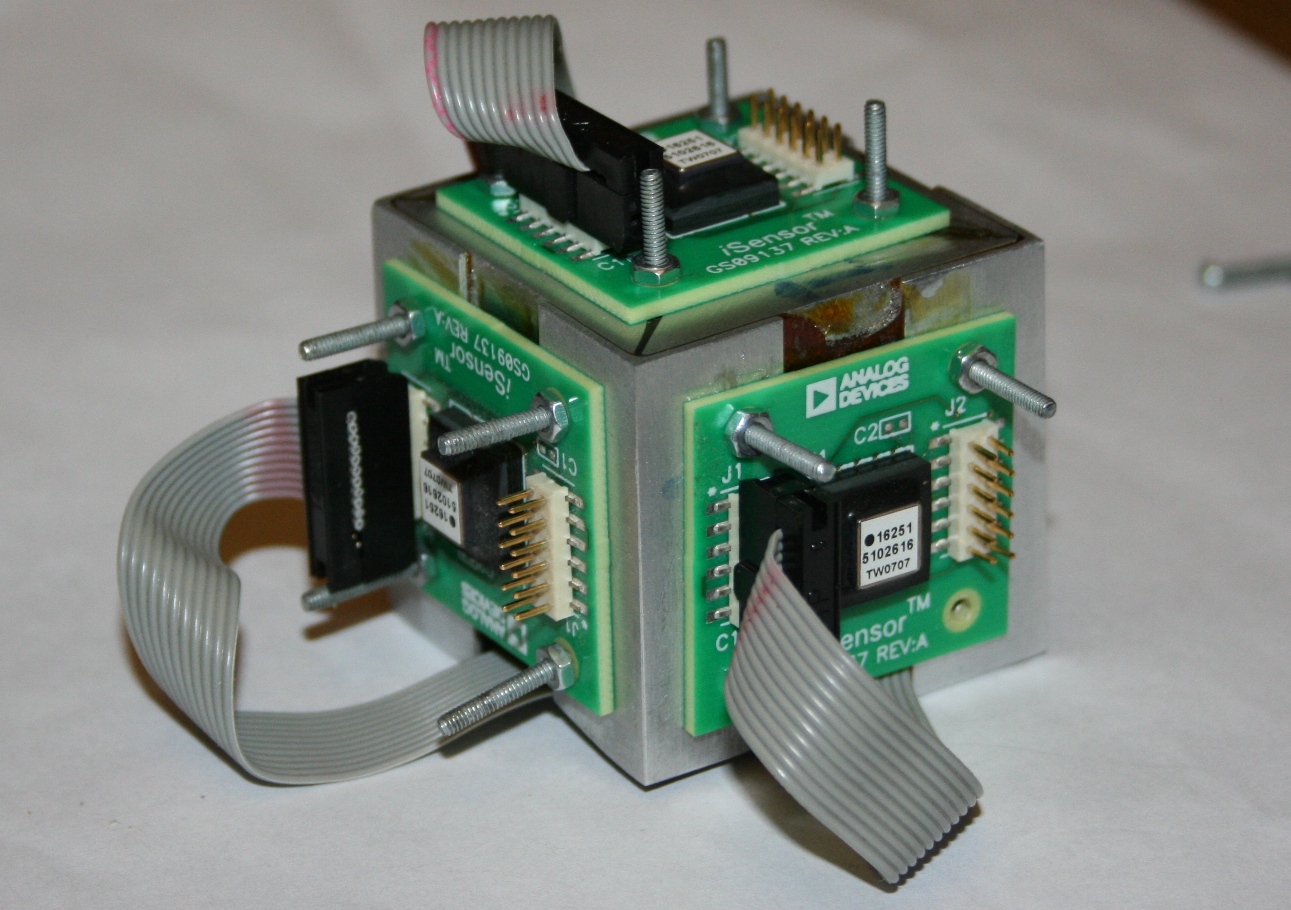
Пришло время поднять эту тему. То есть, пришло время от одноосных экспериментов перейти к трёхосным Hand Made IMU:
Hand Made IMU:
Прикреплённые файлы:

А.С.> Пришло время поднять эту тему. То есть, пришло время от одноосных экспериментов перейти к трёхосным Hand Made IMU:
Внутри стоит ещё и 2-осный акселерометр ADIS16209, для измерения нормального и бокового ускорений. Должен быть ещё продольный, видимо, это будет всё же устаревший. ADXL150. На фото его нет.
Hand Made IMU:Внутри стоит ещё и 2-осный акселерометр ADIS16209, для измерения нормального и бокового ускорений. Должен быть ещё продольный, видимо, это будет всё же устаревший. ADXL150. На фото его нет.
Прикреплённые файлы:
А.С.>> Пришло время поднять эту тему. То есть, пришло время от одноосных экспериментов перейти к трёхосным Hand Made IMU:
А.С.> Внутри стоит ещё и 2-осный акселерометр ADIS16209, для измерения нормального и бокового ускорений. Должен быть ещё продольный, видимо, это будет всё же устаревший. ADXL150. На фото его нет.
Устройство собрано не до конца, к тому же, это только пробная сборка. Но оно уже прошло ударный тест (падение с табуретки на пол) и вибротест (отжим на стиральной машине)
Делал с помощью кондукторов, один раз ошибся, взял не тот в результате один винтик стоит косо.
Выбрана лучшая тройка граней, по измерениям, перекосы не превышают 40 угловых минут, за исключением перекоса между стоящим внутри акселерометром и гироскопом над ним. Там неровный слой эпоксидной смолы. Буду подкладывать шайбочки, добиваясь параллельности плоскостей
Hand Made IMU:А.С.> Внутри стоит ещё и 2-осный акселерометр ADIS16209, для измерения нормального и бокового ускорений. Должен быть ещё продольный, видимо, это будет всё же устаревший. ADXL150. На фото его нет.
Устройство собрано не до конца, к тому же, это только пробная сборка. Но оно уже прошло ударный тест (падение с табуретки на пол) и вибротест (отжим на стиральной машине)
Делал с помощью кондукторов, один раз ошибся, взял не тот
в результате один винтик стоит косо.Выбрана лучшая тройка граней, по измерениям, перекосы не превышают 40 угловых минут, за исключением перекоса между стоящим внутри акселерометром и гироскопом над ним. Там неровный слой эпоксидной смолы. Буду подкладывать шайбочки, добиваясь параллельности плоскостей
Прикреплённые файлы:
Чем это IMU лучше готовых? В основном, диапазонами. Ни у одного "цельного" IMU в нынешнем каталоге Analog Devices нет диапазона угловых скоростей 20 градусов в секунду, там минимальный диапазон - 75 или 80 градусов в секунду. У встроенных акселерометров одинаковая чувствительность по всем трём осям, а мне бы хотелось по продольному ускорению иметь 18 же, а по боковому и нормальному - 1,7 же.
Ну и, потом, все эти сэмплы получены от АД бесплатно, а IMU бесплатно они мне послать отказались
Давно дело было, к тому же, пришлось рассказать им кое-какое своё know how, в результате, в гироскоп ADIS16130 оно было внедрено... Получился аппарат, который одновременно и дешевле предыдущей модели, и точнее, и к тому же, с цифровым интерфейсом.
Ну и, потом, все эти сэмплы получены от АД бесплатно, а IMU бесплатно они мне послать отказались
Давно дело было, к тому же, пришлось рассказать им кое-какое своё know how, в результате, в гироскоп ADIS16130 оно было внедрено... Получился аппарат, который одновременно и дешевле предыдущей модели, и точнее, и к тому же, с цифровым интерфейсом.
А.С.>
Круто!
А у меня всё закупленное пока валяется в столе.
Обдумывал заново магнитометр и пришёл к выводу, что надо на три оси поставить один AD7708. Большая экономия на усилителях и других деталюшках и нет проблемы с диапазоном и дискретностью. По сравнению с использованием встроенного в МК АЦП.
А вот знает ли кто, где взять мышиный сенсор, с которого можно изображение вывести?
Круто!
А у меня всё закупленное пока валяется в столе.
Обдумывал заново магнитометр и пришёл к выводу, что надо на три оси поставить один AD7708. Большая экономия на усилителях и других деталюшках и нет проблемы с диапазоном и дискретностью. По сравнению с использованием встроенного в МК АЦП.
А вот знает ли кто, где взять мышиный сенсор, с которого можно изображение вывести?
А.С.>>
Xan> Круто!
Xan> А у меня всё закупленное пока валяется в столе.
Xan> Обдумывал заново магнитометр и пришёл к выводу, что надо на три оси поставить один AD7708.
Xan> Большая экономия на усилителях и других деталюшках и нет проблемы с диапазоном и дискретностью. По сравнению с использованием встроенного в МК АЦП.
Помню по опыту, что, при переключении входов и AD7710 и AD7714 приходилось перекалибровывать, что очень резко замедляло работу. В итоге оказалось в устройство удобнее поставить два 7710 (а в другое - четыре 7715), чем пытаться заставлять АЦП выдвать то, что он должен выдавать.
Xan> А вот знает ли кто, где взять мышиный сенсор, с которого можно изображение вывести?
Ну я б тебе послал один или два. Но я не верю в нашу почту, а DHL слишком дорого выходит.
Я ж писал, что нужно попросить всех знакомых сисадминов потрошить все неисправные мышки.
Xan> Круто!
Xan> А у меня всё закупленное пока валяется в столе.
Xan> Обдумывал заново магнитометр и пришёл к выводу, что надо на три оси поставить один AD7708.
Xan> Большая экономия на усилителях и других деталюшках и нет проблемы с диапазоном и дискретностью. По сравнению с использованием встроенного в МК АЦП.
Помню по опыту, что, при переключении входов и AD7710 и AD7714 приходилось перекалибровывать, что очень резко замедляло работу. В итоге оказалось в устройство удобнее поставить два 7710 (а в другое - четыре 7715), чем пытаться заставлять АЦП выдвать то, что он должен выдавать.
Xan> А вот знает ли кто, где взять мышиный сенсор, с которого можно изображение вывести?
Ну я б тебе послал один или два. Но я не верю в нашу почту, а DHL слишком дорого выходит.
Я ж писал, что нужно попросить всех знакомых сисадминов потрошить все неисправные мышки.
А.С.> Помню по опыту, что, при переключении входов и AD7710 и AD7714 приходилось перекалибровывать
Фигасе!
Там же, как я понимаю, надо один раз сделать калибровку для каждого канала, калибровочные данные запомнятся, а потом при переключении каналов будут использоваться соответствующие каналу.
В крайнем случае, можно всё запомнить в МК и каждый раз при переключении загружать в калибровочные регистры.
А, да! Это про 7708, про 7710 и 7714 я такого не нашёл.
А.С.> а в другое - четыре 7715
Они здоровенные - соик-16. Три штуки кучу места займут и весить будут много!!!
Я лучше 3 7730 поставлю!
А.С.> Я ж писал, что нужно попросить всех знакомых сисадминов потрошить все неисправные мышки.
Нет их у меня, сисадминов.
А какие у мышей фамилии? Может, в магазине они есть.
Фигасе!
Там же, как я понимаю, надо один раз сделать калибровку для каждого канала, калибровочные данные запомнятся, а потом при переключении каналов будут использоваться соответствующие каналу.
В крайнем случае, можно всё запомнить в МК и каждый раз при переключении загружать в калибровочные регистры.
А, да! Это про 7708, про 7710 и 7714 я такого не нашёл.
А.С.> а в другое - четыре 7715
Они здоровенные - соик-16. Три штуки кучу места займут и весить будут много!!!
Я лучше 3 7730 поставлю!
А.С.> Я ж писал, что нужно попросить всех знакомых сисадминов потрошить все неисправные мышки.
Нет их у меня, сисадминов.
А какие у мышей фамилии? Может, в магазине они есть.
Реклама Google — средство выживания форумов :)

Xan> Нет их у меня, сисадминов.
Xan> А какие у мышей фамилии? Может, в магазине они есть.
какие фамилии у мышей - не известно. могут быть какие угодно.
А4 например.
изображение отдают оптические датчики Agilent (Avago)
ADNS 1610, 1620, 2610, 2620. вернее всего и другие .
не отдают PAN 301 , 3101 (это самые распространенные).
Заявляется что в игровых мышах матрица оптическая до 64 пикселей доходит по оси.
Но зачем тебе голое изображение ?
Относительный сдвиг картинки отрабатывается самим датчиком отлично.
По картинке только источник света удобно находить.
Мышей для отбора брал в компьютерном сервисном центре.
Бесплатно. Объяснил мужикам - поняли. И вынес 20 мертвых мышей , 20 ДВД приводов, 2 принтера.
В мышах датчик с изображением попадался с частотой 1/10.
Xan> А какие у мышей фамилии? Может, в магазине они есть.
какие фамилии у мышей - не известно. могут быть какие угодно.
А4 например.
изображение отдают оптические датчики Agilent (Avago)
ADNS 1610, 1620, 2610, 2620. вернее всего и другие .
не отдают PAN 301 , 3101 (это самые распространенные).
Заявляется что в игровых мышах матрица оптическая до 64 пикселей доходит по оси.
Но зачем тебе голое изображение ?
Относительный сдвиг картинки отрабатывается самим датчиком отлично.
По картинке только источник света удобно находить.
Мышей для отбора брал в компьютерном сервисном центре.
Бесплатно. Объяснил мужикам - поняли. И вынес 20 мертвых мышей , 20 ДВД приводов, 2 принтера.
В мышах датчик с изображением попадался с частотой 1/10.
Это сообщение редактировалось 23.01.2011 в 22:26
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}