-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 Non-conformist
Non-conformist

Поскольку стоит практическая задача выбрать лучший из имеющихся под рукой гироскопов, т.е. если речь идет о СРАВНЕНИИ, а не об измерении, то басовик - это готовый стенд. Даже если там будет присутствовать крутка диффузора и прочие чудовища; а если не доводить диффузор до усеру, то все эти чудеса почувствовать будет довольно сложно имхо. Ради академизма можно будет на время обменяться реальными образцами гироскопов, и получить сравнительные данные с разных динамиков. Я думаю, результаты будут хорошо воспроизводимы.


 инфо
инфо инструменты
инструменты Piroman
Piroman

1. "круговое" движение на диффузоре можно будет оценить, по снятым показаниям угловой скорости
2. если положить динамик на "спину" то не будет изгибающего момента.
вывод - мерить , а на остальное .. забыть
2. если положить динамик на "спину" то не будет изгибающего момента.
вывод - мерить , а на остальное .. забыть

Piroman> 2. если положить динамик на "спину" то не будет изгибающего момента.
Я так и предлагаю. Причем можно использовать басовик прямо в составе АС, сняв декоративную решетку, если она есть. По окончании экспериментов защитный колпачок зачищается нулевкой от следов клея, и покрывается черной тушью (бумага) или черным маркером (пластик). Никто ничего и не заметит.
Я так и предлагаю. Причем можно использовать басовик прямо в составе АС, сняв декоративную решетку, если она есть. По окончании экспериментов защитный колпачок зачищается нулевкой от следов клея, и покрывается черной тушью (бумага) или черным маркером (пластик). Никто ничего и не заметит.

Испытал сегодня "вибростенд" из басовика. Вывод - идея работоспособная, но крепление должно быть перманентным - я попытался прикрепить малярным скотчем воронку из бутылки от кока-колы, вместо пробки у которой была платка с акселерометром. Малярный скотч не выдерживает ускорений уже порядка метра-двух в секунду в квадрате, кое-как работает на 0,5 м/с2
Соответственно, придётся отказаться от идеи использовать один и тот же динамик и для испытаний, и для музыки.
Соответственно, придётся отказаться от идеи использовать один и тот же динамик и для испытаний, и для музыки.
Прикреплённые файлы:


Вот графичек ускорения. "Биения" на графике вызваны тем, что частота качания составляла 0,22 частоты опроса АЦП, и период маленький (4,5 точки примерно)
Прикреплённые файлы:
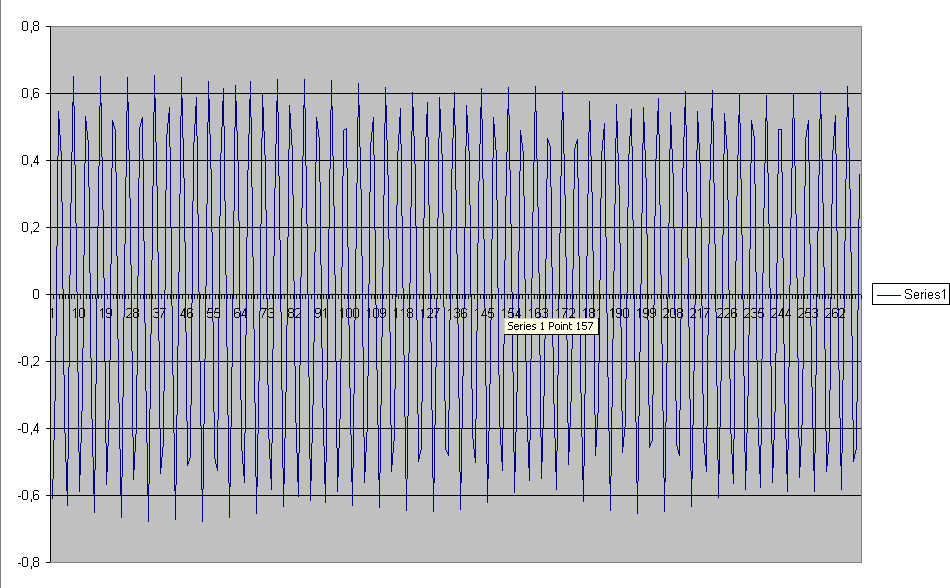
Один из выводов - даже такой грубый акселерометр, как ADXL150, отлично ловит отклонения от горизонтали ") Интеграл от одного градуса за 6 секунд составляет примерно метр в секунду. Понятно, что отклонения от вертикали ловить гораздо хуже - там косинус.
Интеграл от одного градуса за 6 секунд составляет примерно метр в секунду. Понятно, что отклонения от вертикали ловить гораздо хуже - там косинус.
Интеграл от одного градуса за 6 секунд составляет примерно метр в секунду. Понятно, что отклонения от вертикали ловить гораздо хуже - там косинус.

вот так штучка - IIS 7.5 Detailed Error - 500.0 - Internal Server Error
ADIS16405 High Precision Tri-Axis Gyroscope Accelerometer Magnetometer
ADIS16405 High Precision Tri-Axis Gyroscope Accelerometer Magnetometer
 Xan
Xan

termostat> ADIS16405 High Precision Tri-Axis Gyroscope Accelerometer Magnetometer
Да шош это такое! Я за ними не успеваю просто!!!
$708 за коробочку.
Однако, в рекламе "18G", в доках "5G". Непонятно.
Да шош это такое! Я за ними не успеваю просто!!!
$708 за коробочку.
Однако, в рекламе "18G", в доках "5G". Непонятно.
По работе был свободен, прямо на рабочем столе убил сегодняшний день на измерение чувствительности ADIS16251 к линейному ускорению. Вот что вышло:
1. Влияние линейного ускорения - линейное. Ну, в пределах -1...+1 же нелинейности не видно. Ура, товарищи!
2. Чувствительность по разным осям разная.
3. По оси Z (вокруг которой измеряется угловая скорость) она составила 0,08 градуса в секунду на же.
4. По оси X (это которая горизонтально, если надпись удобно читать) она максимальна и составила 0,20 градуса в секунду на же.
5. По оси Y (это оставшаяся) она минимальна и составила примерно 0,002 градуса в секунду на же. Именно это обстоятельство и позволило проверить линейность методом изменения проекции 0,002 градуса в секунду на же - это в пределах погрешностей, к сожалению, я принимаю его просто равным нулю, т.е. по оси Y можно считать гироскоп к ускорениям нечувствительным. Это сильно облегчает жизнь...
По словам NikSR, который на базе больше не появляется в силу занятости, он провёл аналогичные исследования для ADXRS613 и обнаружил там качественно такую же картину (количественно - другую), т.е. ось максимальной чувствительности перпендикулярна оси измерений, по ней оно соответствует приведённому в даташите, а по двум другим - на порядок и более меньше.
1. Влияние линейного ускорения - линейное. Ну, в пределах -1...+1 же нелинейности не видно. Ура, товарищи!
2. Чувствительность по разным осям разная.
3. По оси Z (вокруг которой измеряется угловая скорость) она составила 0,08 градуса в секунду на же.
4. По оси X (это которая горизонтально, если надпись удобно читать) она максимальна и составила 0,20 градуса в секунду на же.
5. По оси Y (это оставшаяся) она минимальна и составила примерно 0,002 градуса в секунду на же. Именно это обстоятельство и позволило проверить линейность методом изменения проекции
0,002 градуса в секунду на же - это в пределах погрешностей, к сожалению, я принимаю его просто равным нулю, т.е. по оси Y можно считать гироскоп к ускорениям нечувствительным. Это сильно облегчает жизнь...По словам NikSR, который на базе больше не появляется в силу занятости, он провёл аналогичные исследования для ADXRS613 и обнаружил там качественно такую же картину (количественно - другую), т.е. ось максимальной чувствительности перпендикулярна оси измерений, по ней оно соответствует приведённому в даташите, а по двум другим - на порядок и более меньше.
 Wyvern-2
Wyvern-2

termostat>> ADIS16405 High Precision Tri-Axis Gyroscope Accelerometer Magnetometer
Xan> Да шош это такое! Я за ними не успеваю просто!!!

Precision Fiber Optic Gyros особенно http://www.kvh.com/Products/product.asp?id=83
200 грамм весом, перегрузки до 40g, уход менее 10/час
Только денег треба")
Xan> Да шош это такое! Я за ними не успеваю просто!!!
Precision Fiber Optic Gyros особенно http://www.kvh.com/Products/product.asp?id=83
200 грамм весом, перегрузки до 40g, уход менее 10/час
Только денег треба

Но! Оказывается простой ( ) механикой можно тоже обиться кое чего: http://www.ppk.perm.ru/baz.asp?ID=3&gID=16&EL=2
Интересно, скока они стоят и продаются ли?
) механикой можно тоже обиться кое чего: http://www.ppk.perm.ru/baz.asp?ID=3&gID=16&EL=2Интересно, скока они стоят и продаются ли?
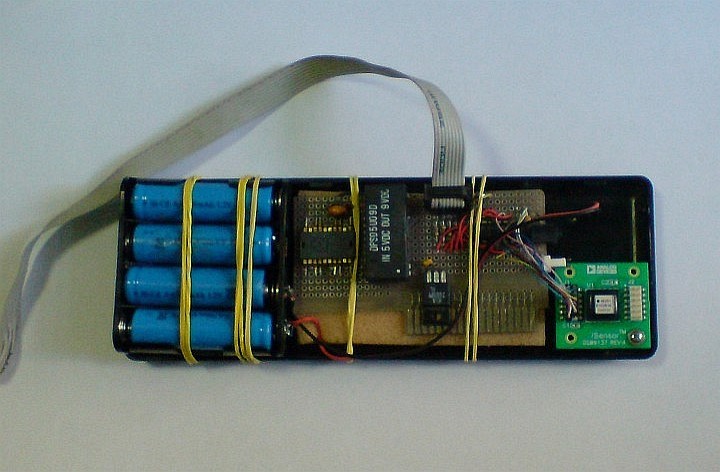
Фотка (мобильником) девайса, использованного в сегодняшних опытах:
Прикреплённые файлы:
А.С.> 3. По оси Z (вокруг которой измеряется угловая скорость) она составила 0,08 градуса в секунду на же.
А.С.> 4. По оси X (это которая горизонтально, если надпись удобно читать) она максимальна и составила 0,20 градуса в секунду на же.
А.С.> 5. По оси Y (это оставшаяся) она минимальна и составила примерно 0,002 градуса в секунду на же.
Очень интересно!
Получается, два гироскопа с горизонтальными осями надо осью Y ориентировать вдоль оси ракеты. И у них будет минимальная чувствительность к ускорению.
А гироскоп с вертикальной осью на полёт любительской ракеты влияет слабее.
А.С.> 4. По оси X (это которая горизонтально, если надпись удобно читать) она максимальна и составила 0,20 градуса в секунду на же.
А.С.> 5. По оси Y (это оставшаяся) она минимальна и составила примерно 0,002 градуса в секунду на же.
Очень интересно!
Получается, два гироскопа с горизонтальными осями надо осью Y ориентировать вдоль оси ракеты. И у них будет минимальная чувствительность к ускорению.
А гироскоп с вертикальной осью на полёт любительской ракеты влияет слабее.
А.С.>> 5. По оси Y (это оставшаяся) она минимальна и составила примерно 0,002 градуса в секунду на же.
Перемерял чувствительность по оси Y - получилось 0,016 градуса в секунду на же. Но это частично можно списать на проекции на ось Х или Z - 4,6 градуса или 11,5 градуса отклонения соответственно. Постарался учесть температуру и питание.
В любом случае, это больше чем на порядок лучше, чем по оси Х.
Перемерял чувствительность по оси Y - получилось 0,016 градуса в секунду на же. Но это частично можно списать на проекции на ось Х или Z - 4,6 градуса или 11,5 градуса отклонения соответственно. Постарался учесть температуру и питание.
В любом случае, это больше чем на порядок лучше, чем по оси Х.
Ну, в общем, вердикт к концу дня - статистически значимой чувствительности по оси Y нету. Я провёл несколько серий с правильным контролем, убедился, что разница между сериями в 0,025 градуса в секунду бывает и без переворачивания, и с переворачиванием меньше.
Конкретно:
1-я серия - положительная ориентация. Средняя за серию (32000 отсчётов)
0,029587123 градуса в секунду
2-я серия - положительная ориентация. Средняя за серию
0,004423958 град/с
3-я серия - отрицательная ориентация. Средняя за серию
-0,009171051 град/с
4-я серия - отрицательная ориентация. Средняя за серию
-0,024919611 град/с
Средняя т-ра за серию:
1 - 41,40395226
2 - 41,46312569
3 - 41,5057667
4 - 41,46280373
Разница т-р от 1-й до 2-й - 0,06 градуса, при 0,03 град/с на градус это даёт 0,0018. На температуру тоже не списать. Значимых изменений напряжения питания не было. Девайс не шевелили.
Конкретно:
1-я серия - положительная ориентация. Средняя за серию (32000 отсчётов)
0,029587123 градуса в секунду
2-я серия - положительная ориентация. Средняя за серию
0,004423958 град/с
3-я серия - отрицательная ориентация. Средняя за серию
-0,009171051 град/с
4-я серия - отрицательная ориентация. Средняя за серию
-0,024919611 град/с
Средняя т-ра за серию:
1 - 41,40395226
2 - 41,46312569
3 - 41,5057667
4 - 41,46280373
Разница т-р от 1-й до 2-й - 0,06 градуса, при 0,03 град/с на градус это даёт 0,0018. На температуру тоже не списать. Значимых изменений напряжения питания не было. Девайс не шевелили.
А.С.> убил сегодняшний день на измерение чувствительности ADIS16251 к линейному ускорению.
Ты не убил ! Ты глаза открываешь общественности. А это дорогого стоит. Спасибо.
http://www.analog.com/static/imported-files/data_sheets/ADIS16251.pdf
Ты не убил ! Ты глаза открываешь общественности. А это дорогого стоит. Спасибо.
http://www.analog.com/static/imported-files/data_sheets/ADIS16251.pdf
Что-то давно никто тему не поднимал. Вот фотка для поднятия темы и заодно настроения:
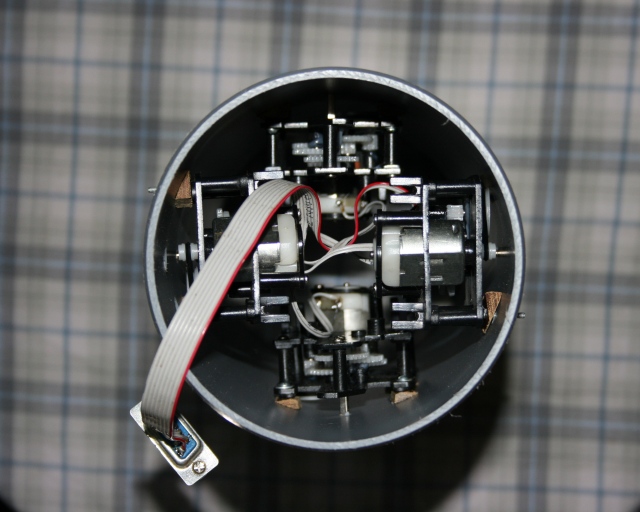
(калибр трубы - 110 мм)
(калибр трубы - 110 мм)
Прикреплённые файлы:

Serge77> Напиши, что это за фото? Откуда?
Кусок пластиковой канализационной трубы послужил корпусом макета отсека системы управления. Эти четыре рулевые машинки будут крутить воздушные рули, но самих рулей пока нет. Аэродинамическая схема по конструктивно-компоновочным соображениям будет "утка", т.е. рули в голове, стабилизаторы на хвосте. И большей площади.
Сами рулевые машинки - китайские. Скорость поворота при 6 вольтах - 90 градусов в секунду. Поскольку крайние положения, видимо, будут порядка 22,5 градусов, от нейтрали до крайнего должна поворачиваться за четверть секунды.
Вначале, конечно, отлаживаться будет в одноосном режиме - буду дуть вентилятором, а малую скорость потока скомпенсирую увеличением "стендовых" рулей раза в три.
Кусок пластиковой канализационной трубы послужил корпусом макета отсека системы управления. Эти четыре рулевые машинки будут крутить воздушные рули, но самих рулей пока нет. Аэродинамическая схема по конструктивно-компоновочным соображениям будет "утка", т.е. рули в голове, стабилизаторы на хвосте. И большей площади.
Сами рулевые машинки - китайские. Скорость поворота при 6 вольтах - 90 градусов в секунду. Поскольку крайние положения, видимо, будут порядка 22,5 градусов, от нейтрали до крайнего должна поворачиваться за четверть секунды.
Вначале, конечно, отлаживаться будет в одноосном режиме - буду дуть вентилятором, а малую скорость потока скомпенсирую увеличением "стендовых" рулей раза в три.
Так ты будешь настраивать управление, подвесив ракету перед вентилятором? Т.е. будешь вручную отклонять её и смотреть, как управление вернёт её на место?
Serge77> Так ты будешь настраивать управление, подвесив ракету перед вентилятором? Т.е. будешь вручную отклонять её и смотреть, как управление вернёт её на место?
Ну, примерно, да. трехниточный подвес (сверху все нити в одной точке) должен дать ракете вертеться только вокруг вертикальной оси, перпендикулярно продольной. Если всё будет работать, возьмусь за стабилизацию по крену (вращению). Для этого нужно будет заменить трёхниточный подвес двухниточным, на уровне продольной оси ракеты. Подвешиваться, конечно, будет только приборный отсек с макетным обтекателем из бумаги, а остальные части ракеты будут имитироваться грузиками. Мне же важны, в основном, моменты их инерции. Конечно, ракету в сборе я тоже надеюсь испытать, но это дело более далёкого будущего.
Над методиками ещё надо думать, но тут у меня есть, кого спросить. NikSR сейчас занимается БПЛА, но MEMS гироскопы у него только для стабилизации камеры, а всё остальное - классическое авиамодельное управление, только с некоторыми особенностями.
Ну, примерно, да. трехниточный подвес (сверху все нити в одной точке) должен дать ракете вертеться только вокруг вертикальной оси, перпендикулярно продольной. Если всё будет работать, возьмусь за стабилизацию по крену (вращению). Для этого нужно будет заменить трёхниточный подвес двухниточным, на уровне продольной оси ракеты. Подвешиваться, конечно, будет только приборный отсек с макетным обтекателем из бумаги, а остальные части ракеты будут имитироваться грузиками. Мне же важны, в основном, моменты их инерции. Конечно, ракету в сборе я тоже надеюсь испытать, но это дело более далёкого будущего.
Над методиками ещё надо думать, но тут у меня есть, кого спросить. NikSR сейчас занимается БПЛА, но MEMS гироскопы у него только для стабилизации камеры, а всё остальное - классическое авиамодельное управление, только с некоторыми особенностями.

А.С.> рулевые машинки - китайские.
Сколько весит (примерно) одна китайская рулевая машинка ?
Откуда взялись машинки (куплены, выписаны, отобраны - происхождение) ?
Если "честно приобретены" - сколько стоят ?
Почему четыре машинки (а не две) - для управления по крену ?
Сколько весит (примерно) одна китайская рулевая машинка ?
Откуда взялись машинки (куплены, выписаны, отобраны - происхождение) ?
Если "честно приобретены" - сколько стоят ?
Почему четыре машинки (а не две) - для управления по крену ?
А.С.>> рулевые машинки - китайские.
Ckona> Сколько весит (примерно) одна китайская рулевая машинка ?
Да вес - фигня, проблема с диаметром ракеты. В 90 мм они вписываются, но с трудом. В 110 - с запасами, но это вовсе не любительский калибр...
Ckona> Откуда взялись машинки (куплены, выписаны, отобраны - происхождение) ?
Можно, я не буду отвечать на этот вопрос? Это привода камер видеонаблюдения Камеры списаны по причине мехповреждений, машинки поэтому достались мне нахаляву. Конструкция редуктора поэтому самая простая, и я не уверен, что люфты в шестерёнках не испортят мне всю малину. Да и движок реверсируется не мгновенно. Но там есть фрикционный узел с пассиком, поэтому реверсирование безопасно.
Ckona> Если "честно приобретены" - сколько стоят ?
Камера целиком стоила около 900 рублей. Но я их не покупал. Но даже так это сравнимо с ценой "настоящих" рулевых машинок с таким же моментом (правда, эти больше весят, и занимают больший объём, чем авиамодельные). Наша контора торгует аппаратурой для "любительского" видеонаблюдения, т.е. камеры, платы в компы с 4-16 видеовходами и ящики с 4 видеовходами и винчестером внутри, для видеозаписи без компа. Так что это "отход" моей профессиональной деятельности.
Ckona> Почему четыре машинки (а не две) - для управления по крену ?
Ну, поскольку мне для солнечного датчика управление по крену необходимо, то их не две. А, поскольку желательна функциональная избыточность, то их не три. При четырёх машинках и возможности дифференциального отклонения в обеих парах управляемость сохраняется при отказе любой из машин (и даже в ненулевом положении - правда, диапазон уменьшается при этом).
Ckona> Сколько весит (примерно) одна китайская рулевая машинка ?
Да вес - фигня, проблема с диаметром ракеты. В 90 мм они вписываются, но с трудом. В 110 - с запасами, но это вовсе не любительский калибр...
Ckona> Откуда взялись машинки (куплены, выписаны, отобраны - происхождение) ?
Можно, я не буду отвечать на этот вопрос?
Это привода камер видеонаблюдения Камеры списаны по причине мехповреждений, машинки поэтому достались мне нахаляву. Конструкция редуктора поэтому самая простая, и я не уверен, что люфты в шестерёнках не испортят мне всю малину. Да и движок реверсируется не мгновенно. Но там есть фрикционный узел с пассиком, поэтому реверсирование безопасно.Ckona> Если "честно приобретены" - сколько стоят ?
Камера целиком стоила около 900 рублей. Но я их не покупал. Но даже так это сравнимо с ценой "настоящих" рулевых машинок с таким же моментом (правда, эти больше весят, и занимают больший объём, чем авиамодельные). Наша контора торгует аппаратурой для "любительского" видеонаблюдения, т.е. камеры, платы в компы с 4-16 видеовходами и ящики с 4 видеовходами и винчестером внутри, для видеозаписи без компа. Так что это "отход" моей профессиональной деятельности.
Ckona> Почему четыре машинки (а не две) - для управления по крену ?
Ну, поскольку мне для солнечного датчика управление по крену необходимо, то их не две. А, поскольку желательна функциональная избыточность, то их не три. При четырёх машинках и возможности дифференциального отклонения в обеих парах управляемость сохраняется при отказе любой из машин (и даже в ненулевом положении - правда, диапазон уменьшается при этом).

Как-то так.
Длина отсека системы управления в нынешей инкарнации - около 300 мм, двигательного отсека - около 600 мм, парашют площадью 1,45 м2 отлично помещается в обтекатель.

А.С.> Как-то так.
Схема "утка" для ракеты не есть хорошо. Как говорил мой шеф, даже утки летают по нормальной схеме.
Схема "утка" для ракеты не есть хорошо. Как говорил мой шеф, даже утки летают по нормальной схеме.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
