 Xan
Xan

 инфо
инфо инструменты
инструменты GOGI
GOGI
 Non-conformist
Non-conformist






 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/w/w/www.gwiz-partners.com/assets/images/128x128-crop/remove_before.jpg)
Стабилизация Активная - часть II
Теги:
Ckona> Если можно, выложи пожалуйста.
Так давно уже. На том же месте.
http://dl.dropbox.com/u/6706516/Comport.rar
Сам не проверял.
Но надеюсь на примитивность исправления.
Так давно уже. На том же месте.
http://dl.dropbox.com/u/6706516/Comport.rar
Сам не проверял.
Но надеюсь на примитивность исправления.



shadowjack> Нет, не шутка. Отлаживать нет возможности пока - у меня железки нет.
shadowjack> Почему-то бьется первый байт записываемой страницы.
Связку МК-память вполне можно откатать в симуляторе, например, Proteus.
shadowjack> Почему-то бьется первый байт записываемой страницы.
Связку МК-память вполне можно откатать в симуляторе, например, Proteus.



Ckona> Знаешь, а тут до такого уровня пока никто еще не добирался - все больше трепались...
Ckona> Хотя я недостаточно осведомлен о результатах Андрея Суворова.
Для калибровки гироскопа, на мой взгляд, ничего точнее маятника нет.
Вот давний результат (в т.ч. А.Суворова):
снятые данные с платы , установленной на маятнике. если мне память не изменяет, то длина подвеса 110 см. 2-х осный акселеометр на диапазон 6G и гироскоп 300 dps .Все аналоговое. Данные с акселеометров показаны в миллиЖе. Гироскоп - в милливольтах. так как требовалась калибровка. собственно именно калибровка на маятнике и делалась. Фото маятника прилагаю")
Ckona> Хотя я недостаточно осведомлен о результатах Андрея Суворова.
Для калибровки гироскопа, на мой взгляд, ничего точнее маятника нет.
Вот давний результат (в т.ч. А.Суворова):
снятые данные с платы , установленной на маятнике. если мне память не изменяет, то длина подвеса 110 см. 2-х осный акселеометр на диапазон 6G и гироскоп 300 dps .Все аналоговое. Данные с акселеометров показаны в миллиЖе. Гироскоп - в милливольтах. так как требовалась калибровка. собственно именно калибровка на маятнике и делалась. Фото маятника прилагаю
Прикреплённые файлы:


I.C.> Для калибровки гироскопа, на мой взгляд, ничего точнее маятника нет.
Почему? Если это IMU (гироскоп + акселерометр), то любая небыстрая вертушка типа граммофона имхо даст весьма точные результаты. Причём вертикальность плоскости вращения, и даже какая-то строгая стабилизация частоты вращения никакого значения не имеют.
По максимумам синусоиды, получаемой с акселя, точнейшим образом замеряем период вращения, а угловую скорость получаем в "гироскопических попугаях", усредняя показания гироскопа за достаточно длительный промежуток времени. Путём нехитрых вычислений получаем всё необходимое для дальнейшей работы. На мой взгляд, найти, а точнее "увидеть" такой "стенд" в окружающих нас повседневных пейзажах довольно просто.
Но несмотря на то, что всё это выглядит довольно глубокомысленным и впечатляет сочувствующих наблюдателей, по здравом размышлении нисколько не приближает нас к решению задачи. Всё это напоминает игру ребёнка с кубиками, познание базовых законов окружающего мира... Звёзды от этого не становятся ближе. ))
Почему? Если это IMU (гироскоп + акселерометр), то любая небыстрая вертушка типа граммофона имхо даст весьма точные результаты. Причём вертикальность плоскости вращения, и даже какая-то строгая стабилизация частоты вращения никакого значения не имеют.
По максимумам синусоиды, получаемой с акселя, точнейшим образом замеряем период вращения, а угловую скорость получаем в "гироскопических попугаях", усредняя показания гироскопа за достаточно длительный промежуток времени. Путём нехитрых вычислений получаем всё необходимое для дальнейшей работы. На мой взгляд, найти, а точнее "увидеть" такой "стенд" в окружающих нас повседневных пейзажах довольно просто.
Но несмотря на то, что всё это выглядит довольно глубокомысленным и впечатляет сочувствующих наблюдателей, по здравом размышлении нисколько не приближает нас к решению задачи. Всё это напоминает игру ребёнка с кубиками, познание базовых законов окружающего мира... Звёзды от этого не становятся ближе. ))

Передаю библиотечку текущих версий скетчей для мемс-шилда.
Прикреплённые файлы:
Arduino.rar (скачать)
[7 кБ]

shadowjack
втянувшийся
Non-conformist> Передаю библиотечку текущих версий скетчей для мемс-шилда.
Я до 6 числа беру отпуск на форуме.
Я до 6 числа беру отпуск на форуме.

Восхищен качеством исполнения. Не зря была такая возня с ковриком ! Сделано на "отлично".
Прикреплённые файлы:
Спасибо за высокую оценку!
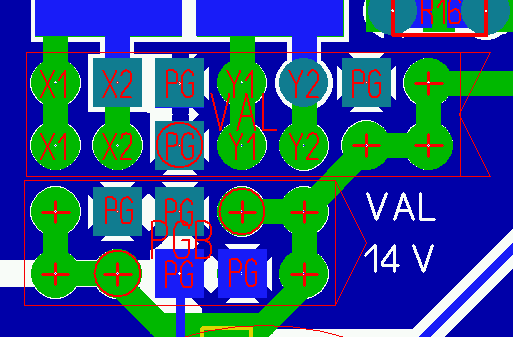
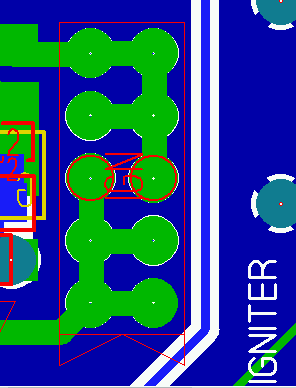
Я забыл повыламывать штырьки-ключи из гребёнок. Прилагаю картинки. Ключи обозначены красными окружностями; вид на плату снаружи, со стороны пищалки. В розетках ключи представляют собой загнанные в соответствующие гнёзда свежевыломанные штырьки, закапанные поверх эпоксидкой (торец загнанного в гнездо штыря должен быть заглублён под плоскость розетки примерно на миллиметр). Выпуклость отверждённой эпоксидной капли стачивается/срезается заподлицо с плоскостью розетки.
Я забыл повыламывать штырьки-ключи из гребёнок. Прилагаю картинки. Ключи обозначены красными окружностями; вид на плату снаружи, со стороны пищалки. В розетках ключи представляют собой загнанные в соответствующие гнёзда свежевыломанные штырьки, закапанные поверх эпоксидкой (торец загнанного в гнездо штыря должен быть заглублён под плоскость розетки примерно на миллиметр). Выпуклость отверждённой эпоксидной капли стачивается/срезается заподлицо с плоскостью розетки.
Сигнальное питание.
Прикреплённые файлы:
Non-conformist> загнанные в соответствующие гнёзда свежевыломанные штырьки, закапанные поверх эпоксидкой.
В полученном шилде ничего такого не обнаружено... все гнезда свободны.
Сколько щилдов у тебя было изготовлено ?
В полученном шилде ничего такого не обнаружено... все гнезда свободны.
Сколько щилдов у тебя было изготовлено ?
Ckona> В полученном шилде ничего такого не обнаружено... все гнезда свободны.
Я же говорю - забыл. Вылетело из головы. Т.е. вышеописанные операции придётся выполнить тебе, согласно приложенных картинок. Думаю, никаких затруднений у тебя это не вызовет.
Надеваешь на нужный штырь подходящую медицинскую иглу (от капельницы), и покачиванием от соседнего к соседнему штырьку, отламываешь. Металл там твёрдый, хрупкий, долго качать не придётся. Как правило отламывается заподлицо, но в случае неудачи оставшийся "пенёк" можно без труда сровнять дремелем.
Я же говорю - забыл. Вылетело из головы. Т.е. вышеописанные операции придётся выполнить тебе, согласно приложенных картинок. Думаю, никаких затруднений у тебя это не вызовет.
Надеваешь на нужный штырь подходящую медицинскую иглу (от капельницы), и покачиванием от соседнего к соседнему штырьку, отламываешь. Металл там твёрдый, хрупкий, долго качать не придётся. Как правило отламывается заподлицо, но в случае неудачи оставшийся "пенёк" можно без труда сровнять дремелем.
Non-conformist> Я забыл повыламывать штырьки-ключи ... В розетках ключи представляют собой загнанные штырьки
А-а-а, понял. Не повыламывать, а изготовить ключи. Это запросто.
Также буду разбираться в управлении, в кодах программ.
А-а-а, понял. Не повыламывать, а изготовить ключи. Это запросто.
Также буду разбираться в управлении, в кодах программ.
Ckona>> А не пахнет ли тут групповым проектом ?
Ckona> Узловыми составляющими проекта являются корректирующие пневмоклапаны (Киев),
Ckona> инерциальная система измерения угловых координат(Чернигов),
Ckona> программно-аппаратная платформа(Москва).
Ckona> По завершении конструкторских работ и изготовления платы ИСС, разработки ПО, изготовления рабочих пневмоклапанов,
Ckona> планируется тестовая программа проверки системы на маятниковом стенде, с последующим переходом к летным испытаниям.
Ckona> Ориентировочные сроки выхода на стендовые испытания - февраль/март.
Первый этап успешно завершен.
К сожалению, нечетко зафиксированы основные параметры Ардоскопа - но это не проблема.
Проект разветвляется на подзадачи.
Технологические: изготовить электромагниты и клапаны.
Это - к токарю, я буду мотать катушки и лепить все в кучу.
Типавнедренческие: освоить датчик "Ардоскоп" (софт, крепление, стенд и др.).
Эх, нашелся бы компетентный энтузиаст сидеть тут между Ардоскопом и компьютером...
"Оживить бутерброд" может занять у меня много времени... Но это сейчас важнее всего.
Экспериментальные: сконструировать и изготовить стенд для отработки системы двухосной стабилизации.
На фото - шарнир, основа стенда.
Конструкторско-доводочные: довести до тестового запуска последнюю модификацию ракеты "Пеликан".
"Знаю как - не знаю когда". Тоже хороший кусок практически рутинной работы.
Конструкторские: пневмоаккумулятор системы стабилизации, несущий отсек БРЭО.
Проще всего - на четырех отдельных бутылках. Лучше всего - отбор давления из единого аккумулятора. Не впасть бы в мотовство тора из стеклонити!
Типаниокр: аэродинамическая вертикальная стабилизация второй ступени.
Ckona> Узловыми составляющими проекта являются корректирующие пневмоклапаны (Киев),
Ckona> инерциальная система измерения угловых координат(Чернигов),
Ckona> программно-аппаратная платформа(Москва).
Ckona> По завершении конструкторских работ и изготовления платы ИСС, разработки ПО, изготовления рабочих пневмоклапанов,
Ckona> планируется тестовая программа проверки системы на маятниковом стенде, с последующим переходом к летным испытаниям.
Ckona> Ориентировочные сроки выхода на стендовые испытания - февраль/март.
Первый этап успешно завершен.
К сожалению, нечетко зафиксированы основные параметры Ардоскопа - но это не проблема.
Проект разветвляется на подзадачи.
Технологические: изготовить электромагниты и клапаны.
Это - к токарю, я буду мотать катушки и лепить все в кучу.
Типавнедренческие: освоить датчик "Ардоскоп" (софт, крепление, стенд и др.).
Эх, нашелся бы компетентный энтузиаст сидеть тут между Ардоскопом и компьютером...
"Оживить бутерброд" может занять у меня много времени... Но это сейчас важнее всего.
Экспериментальные: сконструировать и изготовить стенд для отработки системы двухосной стабилизации.
На фото - шарнир, основа стенда.
Конструкторско-доводочные: довести до тестового запуска последнюю модификацию ракеты "Пеликан".
"Знаю как - не знаю когда". Тоже хороший кусок практически рутинной работы.
Конструкторские: пневмоаккумулятор системы стабилизации, несущий отсек БРЭО.
Проще всего - на четырех отдельных бутылках. Лучше всего - отбор давления из единого аккумулятора. Не впасть бы в мотовство тора из стеклонити!
Типаниокр: аэродинамическая вертикальная стабилизация второй ступени.
Прикреплённые файлы:
Ну, выбрали вроде как уже сопредельные граждане своего гаранта конституции аж на несколько лет вперёд... Будем надеяться, что специалист освободится, и займёт, наконец, своё место в обойме.
shadowjack
втянувшийся
Non-conformist> Будем надеяться, что специалист освободится, и займёт, наконец, своё место в обойме.
Ок, я в строю. Итак, какие планы - делаем пишущюю 100 Гц - версию?
Ок, я в строю. Итак, какие планы - делаем пишущюю 100 Гц - версию?
Это хорошо. А что с компом? Наладил?
Я думаю, что сейчас логично было бы сделать стогерцовый автономный регистратор каналов гироскопа и акселерометра. А потом уже пробовать чем-то рулить.
Я думаю, что сейчас логично было бы сделать стогерцовый автономный регистратор каналов гироскопа и акселерометра. А потом уже пробовать чем-то рулить.
> Ок, я в строю.
###, ####### ### ####... )) Мысленно вместе, в общем.
***
My first 6 DOF IMU Sensors Fusion Implementation: ADXL345, ITG3200, Arduino and Processing
Last updated on Tue, 2012-01-31 13:13. Originally submitted by fabio on 2010-11-22 21:36.
When you have created two breakout boards for the ADXL345 accelerometer and the ITG3200 gyroscope and you have those two nice sensors what you can do? Simple: create an implementation of an Attitude sensor fusion which runs with those chips!
So, I started documenting myself and reading lot of stuff on IMUs (inertial measurement units - composed by an accelerometer and a gyroscope) and MARG sensor (an IMU which also has a magnetometer to sense heading).
// Дальше — www.varesano.net
###, ####### ### ####... )) Мысленно вместе, в общем.
***
My first 6 DOF IMU Sensors Fusion Implementation: ADXL345, ITG3200, Arduino and Processing | Varesano.net
Home » Blogs » fabio's blogMy first 6 DOF IMU Sensors Fusion Implementation: ADXL345, ITG3200, Arduino and Processing
Last updated on Tue, 2012-01-31 13:13. Originally submitted by fabio on 2010-11-22 21:36.
When you have created two breakout boards for the ADXL345 accelerometer and the ITG3200 gyroscope and you have those two nice sensors what you can do? Simple: create an implementation of an Attitude sensor fusion which runs with those chips!
So, I started documenting myself and reading lot of stuff on IMUs (inertial measurement units - composed by an accelerometer and a gyroscope) and MARG sensor (an IMU which also has a magnetometer to sense heading).
// Дальше — www.varesano.net
shadowjack> я в строю.
Изучил исходный код программы L3G4200d, которая "на моем языке" называется "Угловая скорость" (УС).
На всякий случай даю описание кода, как я его "вкурил".
Во введении
- подключается стандартная библиотечная процедура Wire,
- назначаются номера регистров согласно даташиту на сенсор,
- назначается адрес сенсора (чип L3G4200d) по шине I2C,
- назначаются переменные ХУZ для отсчетов угловой скорости.
Перед началом циклической работы
- активизируется стандартная процедура Wire,
- устанавливается скорость обмена данными по USB,
- устанавливается шкала (диапазон) измерений угловой скорости,
- дается задержка в полторы секунды.
В основном цикле
- примерно 10 раз в секунду в переменные XYZ считываются составляющие (отсчеты) вектора угловой скорости путем вызова процедуры GetGyroValues
- принятые отсчеты передаются по USB.
Процедура getGyroValues
- обращается к сенсору по I2C,
- после получения 8-разрядных фрагментов MSB и LSB объединяет их в один 16-разрядный отсчет,
- возвращает три значения X Y Z.
Процедура setupL3G4200d
- конфигурирует сенсор, записывая по I2C в регистры сенсора необходимые числа в соответствии с предписанным значением шкалы (диапазона).
Процедуры readRegister и writeRegister
- регламентируют вызов стандартной библиотечной процедуры Wire.
Вопросы технические:
1) почему getGyroValues и writeRegister задаются оператором void,
а setupL3G4200d и readRegister задаются оператором int ??
(я понимаю разницу между подпрограммой-процедурой и подпрограммой-функцией)
2) правильно ли я понимаю, что стандартная библиотечная процедура Wire
как раз и является указанием на обмен данными по протоколу/шине I2C ??
Вопрос по существу:
Если я начну дописывать код в пределах рабочего цикла LOOP, уцепившись за значения отсчетов угловых скоростей XYZ - с целью управлять клапанами, не вызовет ли это сбои при обращении к процедурам ?
Изучил исходный код программы L3G4200d, которая "на моем языке" называется "Угловая скорость" (УС).
На всякий случай даю описание кода, как я его "вкурил".
Во введении
- подключается стандартная библиотечная процедура Wire,
- назначаются номера регистров согласно даташиту на сенсор,
- назначается адрес сенсора (чип L3G4200d) по шине I2C,
- назначаются переменные ХУZ для отсчетов угловой скорости.
Перед началом циклической работы
- активизируется стандартная процедура Wire,
- устанавливается скорость обмена данными по USB,
- устанавливается шкала (диапазон) измерений угловой скорости,
- дается задержка в полторы секунды.
В основном цикле
- примерно 10 раз в секунду в переменные XYZ считываются составляющие (отсчеты) вектора угловой скорости путем вызова процедуры GetGyroValues
- принятые отсчеты передаются по USB.
Процедура getGyroValues
- обращается к сенсору по I2C,
- после получения 8-разрядных фрагментов MSB и LSB объединяет их в один 16-разрядный отсчет,
- возвращает три значения X Y Z.
Процедура setupL3G4200d
- конфигурирует сенсор, записывая по I2C в регистры сенсора необходимые числа в соответствии с предписанным значением шкалы (диапазона).
Процедуры readRegister и writeRegister
- регламентируют вызов стандартной библиотечной процедуры Wire.
Вопросы технические:
1) почему getGyroValues и writeRegister задаются оператором void,
а setupL3G4200d и readRegister задаются оператором int ??
(я понимаю разницу между подпрограммой-процедурой и подпрограммой-функцией)
2) правильно ли я понимаю, что стандартная библиотечная процедура Wire
как раз и является указанием на обмен данными по протоколу/шине I2C ??
Вопрос по существу:
Если я начну дописывать код в пределах рабочего цикла LOOP, уцепившись за значения отсчетов угловых скоростей XYZ - с целью управлять клапанами, не вызовет ли это сбои при обращении к процедурам ?
Вот из другой задачи:
Летные испытания могут проводиться после серии не менее чем 5 подряд успешных приземлений разгонной ступени на парашютах, с индикатором ударного ускорения в качестве макета Ардоскопа.
До сих пор оно плюхается "через раз", надежда на увеличенный топливный отсек и повышение давления до 6 атмосфер.
Летные испытания могут проводиться после серии не менее чем 5 подряд успешных приземлений разгонной ступени на парашютах, с индикатором ударного ускорения в качестве макета Ардоскопа.
До сих пор оно плюхается "через раз", надежда на увеличенный топливный отсек и повышение давления до 6 атмосфер.
Подождал до понедельника. У меня три варианта на все твои вопросы, Алексей:
1. Случилось что-то серьёзное;
2. Засранец обыкновенный;
3. Комбинация пп. 1 и 2;
4. Я чего-то не понимаю, и сейчас такое - нормальный ход.
Это какая-то жопа вообще. Натуральная засада...
1. Случилось что-то серьёзное;
2. Засранец обыкновенный;
3. Комбинация пп. 1 и 2;
4. Я чего-то не понимаю, и сейчас такое - нормальный ход.
Это какая-то жопа вообще. Натуральная засада...
Non-conformist> Засранец обыкновенный;... какая-то жопа вообще.
От фекальных выражений становится неинтересно.
Вопросы были адресованы ShadowJack'у, как автору кода.
29 февраля опубликовано:
> Передаю библиотечку текущих версий скетчей для мемс-шилда.
Успешно получено, читается и загружается.
5-го марта я опубликовал "подзадачи", в том числе "освоение датчика".
После изучения прилагаемого софта (L3g4200d, Lis331dL, EEPROM1024, button_d4),
были сформулированы вопросы по L3g4200d.
Первая проверка - сигнализация лампочкой при выходе за установленные пороговые значения.
Для этого надо расширить код, предварительно "вычислив", какие ноги дергать.
А также все смонтировать в кучу, у меня это 2-3 недели.
От фекальных выражений становится неинтересно.
Вопросы были адресованы ShadowJack'у, как автору кода.
29 февраля опубликовано:
> Передаю библиотечку текущих версий скетчей для мемс-шилда.
Успешно получено, читается и загружается.
5-го марта я опубликовал "подзадачи", в том числе "освоение датчика".
После изучения прилагаемого софта (L3g4200d, Lis331dL, EEPROM1024, button_d4),
были сформулированы вопросы по L3g4200d.
Первая проверка - сигнализация лампочкой при выходе за установленные пороговые значения.
Для этого надо расширить код, предварительно "вычислив", какие ноги дергать.
А также все смонтировать в кучу, у меня это 2-3 недели.
Каковы впечатления, таковы и выражения. Реплика была вообще не о твоих задачах с подзадачами. Впрочем, пустое... Правы были ГОГИ с Братом-2. Не получается здесь совместных проектов.

Non-conformist> Правы были ...
И, тем не менее, твоя работа достойна уважения!
И, тем не менее, твоя работа достойна уважения!
Реклама Google — средство выживания форумов :)
Вот это конкретное мудозвонство выводит меня из себя: Стабилизация Активная - часть II [shadowjack#20.12.11 14:24]
Если ты по жизни такой непредсказуемо занятой - зачем ляпать что попало, кто за язык тебя дёргает? Но если уж ляпнул, так имхо как-то слово надо пытаться держать...
То комп у него не так работает, то путиных он выбирает, то в жопе зачесалось, то ещё что-нибудь... Детский сад какой-то, воля ваша... Пятнадцатилетний программист-самородок, стопудово... Хоть фейс-контрол на форуме вводи!
Если ты по жизни такой непредсказуемо занятой - зачем ляпать что попало, кто за язык тебя дёргает? Но если уж ляпнул, так имхо как-то слово надо пытаться держать...
То комп у него не так работает, то путиных он выбирает, то в жопе зачесалось, то ещё что-нибудь... Детский сад какой-то, воля ваша... Пятнадцатилетний программист-самородок, стопудово... Хоть фейс-контрол на форуме вводи!
Copyright © Balancer 1997..2023
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 09.01.2004
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
