-
/bulm.jpg)
РобоАПЛ
Теги:
/bulm.jpg)

Фигурант> Но опять же, в этом деле у меня уровень - ноль.
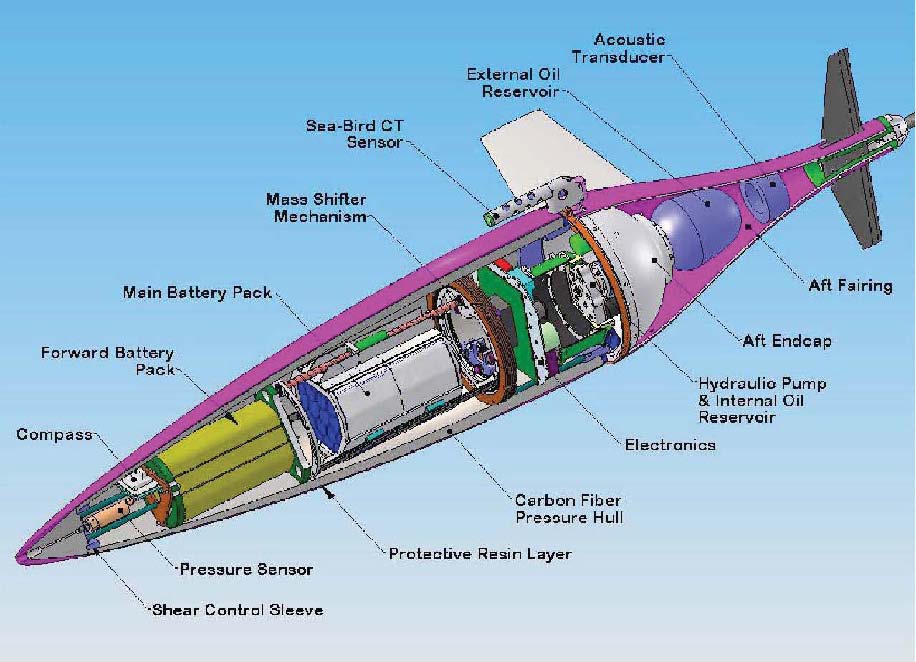
Щаз будет не ноль — смотрите на картинку. Дифферент создаётся не крыльями, а перемещением центра тяжести — батарея на червяке. Крылья из синтактика и неподвижны.
Щаз будет не ноль — смотрите на картинку. Дифферент создаётся не крыльями, а перемещением центра тяжести — батарея на червяке. Крылья из синтактика и неподвижны.
Прикреплённые файлы:


 инфо
инфо инструменты
инструменты Wyvern-2
Wyvern-2

Фигурант>> Но опять же, в этом деле у меня уровень - ноль.
au> Щаз будет не ноль — смотрите на картинку.
Ваш спор (!?") ) не имеет смысла
) не имеет смысла  Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятия
Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятия
Аквапланер != самолет/планер. Это ДИРИЖАБЛЬ - прямая аналогия - с динамическим управлением по высоте. Не КРЫЛЬЯ создают подъемную тягу - а сила Архимеда. Поэтому объект с таким типом движения может быть любого размера - только бы малая глубина не делала неэффективным такой тип движения. И киты, кстати, именно так часто и плавают.
au> Щаз будет не ноль — смотрите на картинку.
Ваш спор (!?
) не имеет смысла Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятия Аквапланер != самолет/планер. Это ДИРИЖАБЛЬ - прямая аналогия - с динамическим управлением по высоте. Не КРЫЛЬЯ создают подъемную тягу - а сила Архимеда. Поэтому объект с таким типом движения может быть любого размера - только бы малая глубина не делала неэффективным такой тип движения. И киты, кстати, именно так часто и плавают.
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης
 Фигурант
Фигурант

2au: да читал я, только это опять же не канает (согласно моим скудым знаниям о физических законах): тут просто изменение центромассы, и как следствие дифферента. Если эта масса, или импульс масс, будет превышать плавучесть, то байдарка просто утонет при очередном маневре
Wyvern-2> Аквапланер != самолет/планер. Это ДИРИЖАБЛЬ - прямая аналогия - с динамическим управлением по высоте. Не КРЫЛЬЯ создают подъемную тягу - а сила Архимеда. Поэтому объект с таким типом движения может быть любого размера...
Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да? И сопротивление там тоже ноль, надо понимать. И что будет если эти крылья, которые якобы никак на силу Архимедову не влияют не достаточно обеспечивают динамическое управление по причине того, что они не достаточно размерны для махины, которая большинство плавучести и обеспечивает? Получим неустойчивую, сверхплавучую или наоборот устойчивую и норовящую утонуть дуру.
Wyvern-2> Аквапланер != самолет/планер. Это ДИРИЖАБЛЬ - прямая аналогия - с динамическим управлением по высоте. Не КРЫЛЬЯ создают подъемную тягу - а сила Архимеда. Поэтому объект с таким типом движения может быть любого размера...
Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да? И сопротивление там тоже ноль, надо понимать. И что будет если эти крылья, которые якобы никак на силу Архимедову не влияют
не достаточно обеспечивают динамическое управление по причине того, что они не достаточно размерны для махины, которая большинство плавучести и обеспечивает? Получим неустойчивую, сверхплавучую или наоборот устойчивую и норовящую утонуть дуру.
Wyvern-2> Ваш спор (!? ) не имеет смысла Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятия
Обычное обсуждение предмета, без пыла и малопонятных гуманитарных терминов з.ы. Зато со слайдами!
з.ы. Зато со слайдами!
Wyvern-2> И киты, кстати, именно так часто и плавают.
Я вот не знаю как они там плавают. Всё что видел — всё "с мотором", хоть и медленно обычно. Хотя может и планируют вниз..
) не имеет смысла Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятияОбычное обсуждение предмета, без пыла и малопонятных гуманитарных терминов
з.ы. Зато со слайдами! Wyvern-2> И киты, кстати, именно так часто и плавают.
Я вот не знаю как они там плавают. Всё что видел — всё "с мотором", хоть и медленно обычно. Хотя может и планируют вниз..
Фигурант> Если эта масса, или импульс масс, будет превышать плавучесть, то байдарка просто утонет при очередном маневре
Там buoyancy engine — механизм переменной/управляемой плавучести. Рассмотрите картинку — он сзади прочного корпуса. Внутри компрессор, снаружи пузырь с маслом.
Фигурант> Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да?
Веса в воде не имеют. Более того, у данного конкретного аппарата ещё и сжимаемость приближена к сжимаемости воды.
Там buoyancy engine — механизм переменной/управляемой плавучести. Рассмотрите картинку — он сзади прочного корпуса. Внутри компрессор, снаружи пузырь с маслом.
Фигурант> Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да?
Веса в воде не имеют. Более того, у данного конкретного аппарата ещё и сжимаемость приближена к сжимаемости воды.
 lowlow
lowlow

Wyvern-2>> Ваш спор (!? ) не имеет смысла Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятия
au> Обычное обсуждение предмета, без пыла и малопонятных гуманитарных терминов з.ы. Зато со слайдами!
Wyvern-2>> И киты, кстати, именно так часто и плавают.
au> Я вот не знаю как они там плавают. Всё что видел — всё "с мотором", хоть и медленно обычно. Хотя может и планируют вниз..
Некоторые морские животные уже - роботы...
Error:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
Error:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
Error:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
) не имеет смысла Так как в пылу аллегорий вы применили неправильную аналогию, подменив понятияau> Обычное обсуждение предмета, без пыла и малопонятных гуманитарных терминов
з.ы. Зато со слайдами! Wyvern-2>> И киты, кстати, именно так часто и плавают.
au> Я вот не знаю как они там плавают. Всё что видел — всё "с мотором", хоть и медленно обычно. Хотя может и планируют вниз..
Некоторые морские животные уже - роботы...
CakePHP: the rapid development php framework: Errors
Not FoundError:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
CakePHP: the rapid development php framework: Errors
Not FoundError:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
CakePHP: the rapid development php framework: Errors
Not FoundError:
The requested address '/resources/browse/configuration/detail.php' was not found on this server.
// auvac.org
Прикреплённые файлы:



au> Там buoyancy engine — механизм переменной/управляемой плавучести.
Да я это все видел. Проблемка не только в том, что кашалоты этот же buoyancy engine штатно имеют (на счастье традиционных парфюмеров ), а в том что я просто засомневался, что та же система сможет нормально работать если робоАПЛ будет 4азмером метров, скажем, 25 и больше - и то, только в смысле гидроориентации при помощи т.н. крыла, так как имхо, масса крыла и сопротивления сожрут все положительные составляющие
Во всем остальном, я ничего против не имею
Фигурант>> Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да?
au> Веса в воде не имеют.
Веса - в смысле как проявления массы м.б. не имеют (и то, это правда только если обьект полностью уравновешен), но Архимед тем хорош, что распостраняется на все, в.т.ч. на то что веса не имеет")
Я чисто наивно так себе представил две крайности:
малый корпус, огромные крылья: динамика огромная, плавучесть не нулевая только если полости в крыльях серьезные и их самих несут.
огромный корпус, малые крылья (схема кашалота): работает только если есть корпус плавуч сам по себе, дифферент только если корпус это сам обеспечивает (кашалот тот же), крыло к дифференту фактически ничего не прибавляет и убавляет.
В обеих схемах главное - плавучесть и сопротивление.
Имхо без них - никуда.
Да я это все видел. Проблемка не только в том, что кашалоты этот же buoyancy engine штатно имеют (на счастье традиционных парфюмеров
), а в том что я просто засомневался, что та же система сможет нормально работать если робоАПЛ будет 4азмером метров, скажем, 25 и больше - и то, только в смысле гидроориентации при помощи т.н. крыла, так как имхо, масса крыла и сопротивления сожрут все положительные составляющие Во всем остальном, я ничего против не имею
Фигурант>> Гм. А крылья не имеют массы, и сила Архимедова на них не распостраняется, да?
au> Веса в воде не имеют.
Веса - в смысле как проявления массы м.б. не имеют (и то, это правда только если обьект полностью уравновешен), но Архимед тем хорош, что распостраняется на все, в.т.ч. на то что веса не имеет
Я чисто наивно так себе представил две крайности:
малый корпус, огромные крылья: динамика огромная, плавучесть не нулевая только если полости в крыльях серьезные и их самих несут.
огромный корпус, малые крылья (схема кашалота): работает только если есть корпус плавуч сам по себе, дифферент только если корпус это сам обеспечивает (кашалот тот же), крыло к дифференту фактически ничего не прибавляет и убавляет.
В обеих схемах главное - плавучесть и сопротивление.
Имхо без них - никуда.
 aspid_h
aspid_h
Wyvern-2> - ... корпус... без надстройки.
Вопрос вбок от темы: а зачем подводным лодкам надстройка, в чем ее сакральный смысл?
Вопрос вбок от темы: а зачем подводным лодкам надстройка, в чем ее сакральный смысл?
 Deep Blue Sea
Deep Blue Sea

aspid_h> Вопрос вбок от темы: а зачем подводным лодкам надстройка, в чем ее сакральный смысл?
в самом начале подплава это был стабилизирующий элемент, иначе лодка рыскала по курсу и т.д.
Сейчас из-за ходовой рубки и в качестве ограждения выдвижных устройств. Ходовая рубка должна иметь некую минимальную высоту, чтобы людей на ней не заливало в свежую погоду. В принципе, от этого можно отказаться. ПМУ можно и по-другому расположить, чтобы им не понадобилось ОВУ. И все остальное решаемо. Остаются военно-морские традиции
в самом начале подплава это был стабилизирующий элемент, иначе лодка рыскала по курсу и т.д.
Сейчас из-за ходовой рубки и в качестве ограждения выдвижных устройств. Ходовая рубка должна иметь некую минимальную высоту, чтобы людей на ней не заливало в свежую погоду. В принципе, от этого можно отказаться. ПМУ можно и по-другому расположить, чтобы им не понадобилось ОВУ. И все остальное решаемо. Остаются военно-морские традиции
Carpe noctem, quam minime credula postero


aspid_h>> Вопрос вбок от темы: а зачем подводным лодкам надстройка, в чем ее сакральный смысл?
D.B.S.> в самом начале подплава это был стабилизирующий элемент, иначе лодка рыскала по курсу и т.д.
Мне встретилось мнение в одном научно-военно-популярном источнике, что в надстройке можно разместить перископ подлиннее.
Тоже причина достойная уважения... лет шестьдесят назад.
D.B.S.> Сейчас из-за ходовой рубки и в качестве ограждения выдвижных устройств. Ходовая рубка должна иметь некую минимальную высоту, чтобы людей на ней не заливало в свежую погоду. В принципе, от этого можно отказаться. ПМУ можно и по-другому расположить, чтобы им не понадобилось ОВУ. И все остальное решаемо. Остаются военно-морские традиции
Как я понимаю (ради этого и задал свой вопрос), ради удобства экипажа при плавании над водой или в гавани, что является далеко НЕглавной целью и задачей подлодок, жертвуют обтекаемость, высокую скорость под водой, мирятся с повышенным шумом и понижением скрытности?
D.B.S.> в самом начале подплава это был стабилизирующий элемент, иначе лодка рыскала по курсу и т.д.
Мне встретилось мнение в одном научно-военно-популярном источнике, что в надстройке можно разместить перископ подлиннее.
Тоже причина достойная уважения... лет шестьдесят назад.
D.B.S.> Сейчас из-за ходовой рубки и в качестве ограждения выдвижных устройств. Ходовая рубка должна иметь некую минимальную высоту, чтобы людей на ней не заливало в свежую погоду. В принципе, от этого можно отказаться. ПМУ можно и по-другому расположить, чтобы им не понадобилось ОВУ. И все остальное решаемо. Остаются военно-морские традиции
Как я понимаю (ради этого и задал свой вопрос), ради удобства экипажа при плавании над водой или в гавани, что является далеко НЕглавной целью и задачей подлодок, жертвуют обтекаемость, высокую скорость под водой, мирятся с повышенным шумом и понижением скрытности?


off-topic-off> Что то увяла ветка
А чо ей цвести то? Дело переходит в область практики (и подписок) Зато мы тут можем термоядерные ракетные двигатели обсуждать...лет еще эдак 20-30
А чо ей цвести то? Дело переходит в область практики (и подписок)
Зато мы тут можем термоядерные ракетные двигатели обсуждать...лет еще эдак 20-30
Жизнь коротка, путь искусства долог, удобный случай мимолетен, опыт обманчив.... Ἱπποκράτης

Aviagr> просьба ознакомиться с тактикой Москитного оружия, которую я развиваю и продвигаю одновременно с устройствами, ее реализующими
Можно пояснить, Вы представитель научной организации, конструкторского бюро или производства, которые продвигают свою продукцию?
Можно пояснить, Вы представитель научной организации, конструкторского бюро или производства, которые продвигают свою продукцию?
У России только два союзника - ее Армия и ее Флот

Aviagr> Скорее первое (хоть и второе присутствует)
А что хотите то? Если можно, в двух словах, а то из Вашего пространного предыдущего сообщения это понять трудно.
Вы ищете работодателя?
Вы ищете спонсора для Ваших исследований?
Вы хотите найти инвестора в производство некой продукции?
А что хотите то? Если можно, в двух словах, а то из Вашего пространного предыдущего сообщения это понять трудно.
Вы ищете работодателя?
Вы ищете спонсора для Ваших исследований?
Вы хотите найти инвестора в производство некой продукции?
У России только два союзника - ее Армия и ее Флот
Aviagr> У меня слишком разнообразные познания и изобретения, чтобы зацикливаться на чем-то конкретном ")
А какие-то конкретные, нашедшие практическое применение, давшие экономический эффект, результаты Вашего творчества можете назвать?
А какие-то конкретные, нашедшие практическое применение, давшие экономический эффект, результаты Вашего творчества можете назвать?
У России только два союзника - ее Армия и ее Флот
Aviagr> Я думаю, мы и так уже изрядно отвлеклись от темы топика. Для ответов на подобные вопросы я должен быть сам заинтересован в собеседнике. ")
Это, конечно, Ваше право - рассказывать что-то о себе или нет.
Однако, выше Вы пишете:
и я, вполне естественно, пытаюсь понять, кто Вы: непризнанный изобретатель, пытающийся найти себе трибуну, производственник, ищущий заинтересованных в своей продукции - пожалуй, это можно вычеркнуть, обычный спамер, предлагающий "товар, который не отличить от настоящего"?
Дело в том, что на данном некоммерческом ресурсе продвижение товаров и услуг не приветствуется. А отсутствие конкретики в Ваших сообщениях настораживает.
Это, конечно, Ваше право - рассказывать что-то о себе или нет.
Однако, выше Вы пишете:
кое-какой ОПТИМУМ конструкций (всех вышеперечисленных устройств) выкристаллизовался, что я и предлагаю заинтересованным небедным организациям
и я, вполне естественно, пытаюсь понять, кто Вы: непризнанный изобретатель, пытающийся найти себе трибуну,
Дело в том, что на данном некоммерческом ресурсе продвижение товаров и услуг не приветствуется. А отсутствие конкретики в Ваших сообщениях настораживает.
У России только два союзника - ее Армия и ее Флот
Aviagr> Сейчас придет Админ и всех забанит.. 
Вы недалеки от истины. Я как раз пытаюсь решить, забанить Вас за спам на форуме, или я ошибаюсь.
Aviagr> Для подготовки развернутого резюме о себе, я сначала хотел бы больше узнать о своем собеседнике.
В резюме нет нужды. Просто я пытаюсь разобраться в целях Ваших сообщений на данном ресурсе.
Aviagr> Просто при наличии финансов и доброй воли все мои идеи можно реализовать в короткие сроки.
Хотелось бы настоятельно посоветовать Вам не заниматься здесь коммерческими проектами.
Желаете обсудить какую-то научно-техническую проблему с единомышленниками - пожалуйста.
Считайте это административным предупреждением.

Вы недалеки от истины. Я как раз пытаюсь решить, забанить Вас за спам на форуме, или я ошибаюсь.
Aviagr> Для подготовки развернутого резюме о себе, я сначала хотел бы больше узнать о своем собеседнике.
В резюме нет нужды. Просто я пытаюсь разобраться в целях Ваших сообщений на данном ресурсе.
Aviagr> Просто при наличии финансов и доброй воли все мои идеи можно реализовать в короткие сроки.
Хотелось бы настоятельно посоветовать Вам не заниматься здесь коммерческими проектами.
Желаете обсудить какую-то научно-техническую проблему с единомышленниками - пожалуйста.
Считайте это административным предупреждением.
У России только два союзника - ее Армия и ее Флот

Aviagr> Скорее первое (хоть и второе присутствует), но выступаю как частное лицо, дистанцируясь от коллег, параллельно работающих в данном направлении с копиями зарубежных аппаратов (да и не только они этим занимаются - копированием - с ними сотрудничество не задалось, ищу партнеров на стороне..
Из Вашей лексики не видно, что
>> Вы представитель научной организации, конструкторского бюро или производства, которые продвигают свою продукцию?
Если Вы профессионал - напишите что-то, что убедит в этом.
Если не можете - ничего страшного, Вы обычный участник форума, добро пожаловать.
- с ними сотрудничество не задалось, ищу партнеров на стороне.. Из Вашей лексики не видно, что
>> Вы представитель научной организации, конструкторского бюро или производства, которые продвигают свою продукцию?
Если Вы профессионал - напишите что-то, что убедит в этом.
Если не можете - ничего страшного, Вы обычный участник форума, добро пожаловать.


Судя по стилю, нику и интересам, это участник с одноименным ником с форума Отвага
sam7> Если Вы профессионал - напишите что-то, что убедит в этом.
Ну что-вы, как можно сомневаться-то ([цитата]):
Избранное, если интересно.
sam7> Если не можете - ничего страшного, Вы обычный участник форума, добро пожаловать.
Мне почему-то вспоминается сцена из известного фильма-комедии
sam7> Если Вы профессионал - напишите что-то, что убедит в этом.
Ну что-вы, как можно сомневаться-то ([цитата]):
И хорошее техническое образование позволяет проектировать все от трактора до ракеты - чутка поварившись в теме..
Избранное, если интересно.
sam7> Если не можете - ничего страшного, Вы обычный участник форума, добро пожаловать.
Мне почему-то вспоминается сцена из известного фильма-комедии

LtRum> Ну что-вы, как можно сомневаться-то
Да я уже понял, в соседней ветке чуть позже написал.

Да я уже понял, в соседней ветке чуть позже написал.
История и современность отечественной военной, гражданской и прикладной гидронавтики [sam7#16.03.17 16:37]
Слушайте, а ведь это действительно страшно, если статьи выше называются "наукой". Тогда, действительно, проср@ли все полимеры. Ведь это только чуть выше безграмотных журналюг, но, учитывая оболочку, гораздо страшнее. Вот и получите плоды паралаевщины, она взошла. Это не студенческие работы 70-х-начала 80-х, там была наивность и недостаток профессионализма. Здесь махровое дилетанство с апломбом, абсолютное непонимание профессиональных вещей... ну, и владение Интернетом, в некоторой степени.…// Морской
Aviagr> К вящему неудовольствию дилетантов - у меня-то все работает.
Aviagr> А вот чем могут похвастаться брюзжащие снобы?!
Это же надо было написать такой набор слов
"К вящему неудовольствию дилетантов"
Нормальный человек просто офигеет, а его семантический разбор - тема отдельной ветки.
Но Вы на вопрос ответили, спасибо.
Aviagr> А вот чем могут похвастаться брюзжащие снобы?!
Это же надо было написать такой набор слов
"К вящему неудовольствию дилетантов"
Нормальный человек просто офигеет, а его семантический разбор - тема отдельной ветки.
Но Вы на вопрос ответили, спасибо.
 LtRum
LtRum
Aviagr> К вящему неудовольствию дилетантов - у меня-то все работает.
Ничего удивительного, такие вещи описывались лет 30-40 назад в журнале "Катера и яхты", как пример для самоделки.
Ничего удивительного, такие вещи описывались лет 30-40 назад в журнале "Катера и яхты", как пример для самоделки.

LtRum> Избранное, если интересно.
То есть меня чутье не подвело
То есть меня чутье не подвело
У России только два союзника - ее Армия и ее Флот
Данное сообщение является официальным предупреждением
 VAS63
#16.03.2017 22:17 @Aviagr#16.03.2017 22:12
VAS63
#16.03.2017 22:17 @Aviagr#16.03.2017 22:12
Aviagr> Я ПОВТОРНО задаю вопрос: а сами-то что-нибудь РУКАМИ или головой сделали за свою жизнь?! А то апломба было выше Эвереста, а сейчас "виноград зеленый"...
Aviagr
Учитывая, что Вы недавно на форуме, Я ПОВТОРНО Вам говорю:
Желаете обсудить какую-то научно-техническую проблему с единомышленниками - пожалуйста.
Изобретаете - изобретайте себе на здоровье.
Гнуть пальцы на этом форуме не надо.
Aviagr
Учитывая, что Вы недавно на форуме, Я ПОВТОРНО Вам говорю:
Желаете обсудить какую-то научно-техническую проблему с единомышленниками - пожалуйста.
Изобретаете - изобретайте себе на здоровье.
Гнуть пальцы на этом форуме не надо.
У России только два союзника - ее Армия и ее Флот
- VAS63 [16.03.2017 22:17]: Административное предупреждение: VAS63#16.03.17 22:17

VAS63> То есть меня чутье не подвело
А-а, так вы здесь специалисты по борзым щенкам... Но в технике нюх уже давно потеряли...
А-а, так вы здесь специалисты по борзым щенкам... Но в технике нюх уже давно потеряли...
Регалии раздают друг другу люди, талантом наделяет Бог.
VAS63:
предупреждение (+1) по категории «Переход на личности»
- VAS63 [16.03.2017 22:21]: Предупреждение пользователю: Aviagr#16.03.17 22:20
Copyright © Balancer 1997..2018
Создано 29.03.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 29.03.2006
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
