/Image8.jpg)
 Serge77
Serge77

 инфо
инфо инструменты
инструменты pokos
pokos

 termostat
termostat

 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
/Image8.jpg)
Электронное оборудование ракет - БРЭО, часть XI
Теги:
A.C.> Я начинал с тысячи, потом перешёл на сотню,
Даже в свете попыток спрогнозировать дрейф, это неправильно.
A.C.>Вообще-то, сам сигма-дельта АЦП отлично фильтрует,
Определись сначала, тебе фильтрацию или пост. сост.?
A.C.>вопрос, с какой постоянной времени правильно это делать?
Пост. сост. - с бесконечной.
A.C.>А у тебя один-единственный выброс (ну, стукнули по корпусу ракеты гаечным ключом) сказывается на её полёте
Если скомпенсировать нелинейность, то удар никак не отразится на пост.сост. Подумай над этим.
A.C.>Но, дело в том, что неслучайная компонента пока получается гораздо больше случайной, в худшем случае - в пять раз!
Лишнее доказательство того, что надо искать внешние причины. Термостатировать АЦП со всей обвеской, к примеру.
Даже в свете попыток спрогнозировать дрейф, это неправильно.
A.C.>Вообще-то, сам сигма-дельта АЦП отлично фильтрует,
Определись сначала, тебе фильтрацию или пост. сост.?
A.C.>вопрос, с какой постоянной времени правильно это делать?
Пост. сост. - с бесконечной.
A.C.>А у тебя один-единственный выброс (ну, стукнули по корпусу ракеты гаечным ключом) сказывается на её полёте
Если скомпенсировать нелинейность, то удар никак не отразится на пост.сост. Подумай над этим.
A.C.>Но, дело в том, что неслучайная компонента пока получается гораздо больше случайной, в худшем случае - в пять раз!
Лишнее доказательство того, что надо искать внешние причины. Термостатировать АЦП со всей обвеской, к примеру.
Андрей Суворов >
Моя мечта - сделать отклонение в момент перехода на солнечный датчик меньше, чем поле зрения солнечного датчика То есть, три градуса.
Сейчас в типовом случае - пять-шесть, в худшем (экстремально худшем) - десять.
можно поставить второй датчик с боле широким зрением.
можно поставить перед датчиком линзу расширяюшую угол зрния и убираемую электроприводом.
Это сообщение редактировалось 27.12.2005 в 13:56
если взять привод сд-рома то можно целый ряд подвижных линз поставить и начиная от очень широкого угла подправляя ракету идти к отсутствию линзы. Линзы в очковой мастерской наверно можно нарезать.

A.C.>> Я начинал с тысячи, потом перешёл на сотню,
pokos> Даже в свете попыток спрогнозировать дрейф, это неправильно.
Почему? Ведь выходной сигнал гироскопа изменяется со временем.
A.C.>>Вообще-то, сам сигма-дельта АЦП отлично фильтрует,
pokos> Определись сначала, тебе фильтрацию или пост. сост.?
Понимаешь, какая штука... Я не могу определить постоянную составляющую. Это я уже понял. Я могу регистрировать лишь более-менее быстрые изменения. Программа угла тангажа орбитальной ракеты включает несколько участков, и типичные угловые скорости там - 0,01...1 градус в секунду. 1 градус в секунду - это 10 оборотов в час. 0,01 градуса в секунду - это один оборот за 10 часов. Что всё ещё быстрее вращения Земли.
Гироскоп, точнее, любой датчик, который способен определить вращение Земли пусть с ошибкой в 50%, заведомо достаточен для орбитального пуска. А тот, который способен его измерить с точностью в 10% и при этом не зашкаливает в интересующем нас диапазоне угловых скоростей, не требует и коррекции по солнечному датчику. При этом постоянная составляющая вообще-то, не нужна.
Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой. Но - ты используешь с бесконечной.
A.C.>>вопрос, с какой постоянной времени правильно это делать?
pokos> Пост. сост. - с бесконечной.
Аргументируй. Тогда такая постоянная составляющая мне не нужна. Меня не интересуют детали, происходящие медленнее вращения Земли.
A.C.>>А у тебя один-единственный выброс (ну, стукнули по корпусу ракеты гаечным ключом) сказывается на её полёте
pokos> Если скомпенсировать нелинейность, то удар никак не отразится на пост.сост. Подумай над этим.
Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор - не скомпенсируется это при интегрировании. Нелинейность можно компенсировать, лишь пока АЦП или датчик не зашкаливают. А у них динамический диапазон отнюдь не беспредельный.
A.C.>>Но, дело в том, что неслучайная компонента пока получается гораздо больше случайной, в худшем случае - в пять раз!
pokos> Лишнее доказательство того, что надо искать внешние причины. Термостатировать АЦП со всей обвеской, к примеру.
Это я обязательно попробую, но лишь после пробы с двумя гироскопами в одном термостате. Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН.
pokos> Даже в свете попыток спрогнозировать дрейф, это неправильно.
Почему? Ведь выходной сигнал гироскопа изменяется со временем.
A.C.>>Вообще-то, сам сигма-дельта АЦП отлично фильтрует,
pokos> Определись сначала, тебе фильтрацию или пост. сост.?
Понимаешь, какая штука... Я не могу определить постоянную составляющую. Это я уже понял. Я могу регистрировать лишь более-менее быстрые изменения. Программа угла тангажа орбитальной ракеты включает несколько участков, и типичные угловые скорости там - 0,01...1 градус в секунду. 1 градус в секунду - это 10 оборотов в час. 0,01 градуса в секунду - это один оборот за 10 часов. Что всё ещё быстрее вращения Земли.
Гироскоп, точнее, любой датчик, который способен определить вращение Земли пусть с ошибкой в 50%, заведомо достаточен для орбитального пуска. А тот, который способен его измерить с точностью в 10% и при этом не зашкаливает в интересующем нас диапазоне угловых скоростей, не требует и коррекции по солнечному датчику. При этом постоянная составляющая вообще-то, не нужна.
Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой. Но - ты используешь с бесконечной.
A.C.>>вопрос, с какой постоянной времени правильно это делать?
pokos> Пост. сост. - с бесконечной.
Аргументируй. Тогда такая постоянная составляющая мне не нужна. Меня не интересуют детали, происходящие медленнее вращения Земли.
A.C.>>А у тебя один-единственный выброс (ну, стукнули по корпусу ракеты гаечным ключом) сказывается на её полёте
pokos> Если скомпенсировать нелинейность, то удар никак не отразится на пост.сост. Подумай над этим.
Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор - не скомпенсируется это при интегрировании. Нелинейность можно компенсировать, лишь пока АЦП или датчик не зашкаливают. А у них динамический диапазон отнюдь не беспредельный.
A.C.>>Но, дело в том, что неслучайная компонента пока получается гораздо больше случайной, в худшем случае - в пять раз!
pokos> Лишнее доказательство того, что надо искать внешние причины. Термостатировать АЦП со всей обвеской, к примеру.
Это я обязательно попробую, но лишь после пробы с двумя гироскопами в одном термостате. Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН.
А.С.> Почему? Ведь выходной сигнал гироскопа изменяется со временем.
Дык, а чего ж ты кол-во полезных данных уменьшаешь-то?
А.С.>... Я не могу определить постоянную составляющую. Это я уже понял.
Неправильно понял. Ясно, что постоянная составляющая может быть только условной. Но при этом базу для её определения нужно брать как можно больше. Лучше, когда отсчёт начинается в установившемся режиме термостатов, но это не обязательно. Можешь включать ФНЧ сразу по команде "протяжка".
А.С.>.... и типичные угловые скорости там - 0,01...1 градус в секунду.
И ты два порядка величины осилить не можешь? Программа, из которой тот кусок, вкуривает звук в диапазоне 50Гц-14кГц, а постоянная времени этого самого ФНЧ - около 0,3с. Нужен он только для того, чтобы не делать у АЦП биполярный вход или делитель пост. напруги на входе.
А.С.> При этом постоянная составляющая вообще-то, не нужна.
Как это? У датчика биполярный выход без смещения нуля?
А.С.> Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой.
Ну и понятки у вас....
А.С.> Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор -
Это - всего лишь вариант нелинейности, неужели не понятно? Её особенность только в том, что её нельзя скомпенсировать.
А.С.> ...Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН. [»]
Я очень склоняюсь к тому, что сам АЦП и его ИОН достаточно стабильны. А вот с обвеской АЦП - не уверен.
Дык, а чего ж ты кол-во полезных данных уменьшаешь-то?
А.С.>... Я не могу определить постоянную составляющую. Это я уже понял.
Неправильно понял. Ясно, что постоянная составляющая может быть только условной. Но при этом базу для её определения нужно брать как можно больше. Лучше, когда отсчёт начинается в установившемся режиме термостатов, но это не обязательно. Можешь включать ФНЧ сразу по команде "протяжка".
А.С.>.... и типичные угловые скорости там - 0,01...1 градус в секунду.
И ты два порядка величины осилить не можешь? Программа, из которой тот кусок, вкуривает звук в диапазоне 50Гц-14кГц, а постоянная времени этого самого ФНЧ - около 0,3с. Нужен он только для того, чтобы не делать у АЦП биполярный вход или делитель пост. напруги на входе.
А.С.> При этом постоянная составляющая вообще-то, не нужна.
Как это? У датчика биполярный выход без смещения нуля?
А.С.> Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой.
Ну и понятки у вас....
А.С.> Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор -
Это - всего лишь вариант нелинейности, неужели не понятно? Её особенность только в том, что её нельзя скомпенсировать.
А.С.> ...Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН. [»]
Я очень склоняюсь к тому, что сам АЦП и его ИОН достаточно стабильны. А вот с обвеской АЦП - не уверен.
в случае потери ориентира на солнце можно опять поставить наиболее расширяющую зрение линзу и "поймать" солнце вновь.
А.С.>> Почему? Ведь выходной сигнал гироскопа изменяется со временем.
pokos> Дык, а чего ж ты кол-во полезных данных уменьшаешь-то?
А данные, которым минута от роду, оказываются уже вредными.
А.С.>>постоянная составляющая может быть только условной. Но при этом базу для её определения нужно брать как можно больше. Лучше, когда отсчёт начинается в установившемся режиме термостатов, но это не обязательно. Можешь включать ФНЧ сразу по команде "протяжка".
Я тоже так вначале думал. Потому и начал с тысячи отсчётов. Но эксперимент показал, что сто лучше, чем тысяча, а двадцать часто лучше, чем сто. Статистика - 144 выборки. Т.е. 144 эксперимента из 4000 выборок, из которых 1000 были "пристрелочными", а следующие 3000 (т.е. пять минут) - "зачётными". У твоего фильтра есть достоинства, и я попробую его наложить на имеющиеся данные, но панацеей он уж точно не может быть.
А.С.>>.... и типичные угловые скорости там - 0,01...1 градус в секунду.
pokos> И ты два порядка величины осилить не можешь?
Я? Два порядка? Как бы не так! Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка. Точнее, два, всё же градусом в секунду ограничиваться нельзя, нужно иметь несколькократный запас. У "семёрки" АВД срабатывает при отклонении на семь градусов, но это относительно программной траектории, максимальная скорость разворота у неё градуса два в секунду...
А.С.>> При этом постоянная составляющая вообще-то, не нужна.
pokos> Как это? У датчика биполярный выход без смещения нуля?
Нет, не нужна "постоянная составляющая" с "бесконечной" базой. А у датчика выход дифференциальный, как и вход у АЦП.
А.С.>> Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой.
pokos> Ну и понятки у вас....
Хорошо. Нет в мире никакой постоянной составляющей. Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени. Забудь о постоянной составляющей.
А.С.>> Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор -
pokos> Это - всего лишь вариант нелинейности, неужели не понятно? Её особенность только в том, что её нельзя скомпенсировать.
нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
А.С.>> ...Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН.
pokos> Я очень склоняюсь к тому, что сам АЦП и его ИОН достаточно стабильны. А вот с обвеской АЦП - не уверен.
А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП. Там только токоограничительные резисторы в 200 ом в каждом проводе. Возле АЦП. Коротить пробовал - никакой реакции нет, с ними спокойнее.
pokos> Дык, а чего ж ты кол-во полезных данных уменьшаешь-то?
А данные, которым минута от роду, оказываются уже вредными.
А.С.>>постоянная составляющая может быть только условной. Но при этом базу для её определения нужно брать как можно больше. Лучше, когда отсчёт начинается в установившемся режиме термостатов, но это не обязательно. Можешь включать ФНЧ сразу по команде "протяжка".
Я тоже так вначале думал. Потому и начал с тысячи отсчётов. Но эксперимент показал, что сто лучше, чем тысяча, а двадцать часто лучше, чем сто. Статистика - 144 выборки. Т.е. 144 эксперимента из 4000 выборок, из которых 1000 были "пристрелочными", а следующие 3000 (т.е. пять минут) - "зачётными". У твоего фильтра есть достоинства, и я попробую его наложить на имеющиеся данные, но панацеей он уж точно не может быть.
А.С.>>.... и типичные угловые скорости там - 0,01...1 градус в секунду.
pokos> И ты два порядка величины осилить не можешь?
Я? Два порядка? Как бы не так! Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка. Точнее, два, всё же градусом в секунду ограничиваться нельзя, нужно иметь несколькократный запас. У "семёрки" АВД срабатывает при отклонении на семь градусов, но это относительно программной траектории, максимальная скорость разворота у неё градуса два в секунду...
А.С.>> При этом постоянная составляющая вообще-то, не нужна.
pokos> Как это? У датчика биполярный выход без смещения нуля?
Нет, не нужна "постоянная составляющая" с "бесконечной" базой. А у датчика выход дифференциальный, как и вход у АЦП.
А.С.>> Просто в быту мы называем "постоянной составляющей" то, что выходит за пределы фильтра с конечной импульсной характеристикой.
pokos> Ну и понятки у вас....
Хорошо. Нет в мире никакой постоянной составляющей. Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени. Забудь о постоянной составляющей.
А.С.>> Это зависит от параметров импульса. Если датчик угловой скорости ляжет на упор -
pokos> Это - всего лишь вариант нелинейности, неужели не понятно? Её особенность только в том, что её нельзя скомпенсировать.
нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
А.С.>> ...Это даст косвенные данные по тому, насколько влияет АЦП и его ИОН.
pokos> Я очень склоняюсь к тому, что сам АЦП и его ИОН достаточно стабильны. А вот с обвеской АЦП - не уверен.
А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП. Там только токоограничительные резисторы в 200 ом в каждом проводе. Возле АЦП. Коротить пробовал - никакой реакции нет, с ними спокойнее.
А.С.> А данные, которым минута от роду, оказываются уже вредными.
Дык, ты за минуту 100 отсчётов делаешь?????!!!! Горе мне.....
А.С.> Но эксперимент показал, что сто лучше, чем тысяча...
Значит, условия эксперимента такие. Пока ты не устранишь неслучайные факторы, так и будет.
А.С.> .... Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка.
Блин, а масштаб-то здесь причём!? Я про ДД, а не про масштаб!
А.С.> А у датчика выход дифференциальный, как и вход у АЦП.
Прекрасно. Нащщёт смещения нуля-то как?
А.С.> Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени.
Поясни, что ты считаешь "грамотной". А лучше, нарисуй, что ты имеешь и что хочешь иметь. Так будет понятнее.
А.С.> нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
Андрей, тревожно мне. Почитай чего-нибудь. Немонотоннсоть и нелинейность - это не одно и то же. И немонотонность можно скомпенсировать, а ограничение - нет.
А.С.> А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП.
Понятно. Чем ограничена полоса входного сигнала?
Выкладывай полученные данные, может, угляжу чего.
ПыСы. Сними хоть бы 1к выб\сек, кусок минуту-другую после прогрева, а то нифига не понятно, что у тебя там творится-то.
Дык, ты за минуту 100 отсчётов делаешь?????!!!! Горе мне.....
А.С.> Но эксперимент показал, что сто лучше, чем тысяча...
Значит, условия эксперимента такие. Пока ты не устранишь неслучайные факторы, так и будет.
А.С.> .... Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка.
Блин, а масштаб-то здесь причём!? Я про ДД, а не про масштаб!
А.С.> А у датчика выход дифференциальный, как и вход у АЦП.
Прекрасно. Нащщёт смещения нуля-то как?
А.С.> Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени.
Поясни, что ты считаешь "грамотной". А лучше, нарисуй, что ты имеешь и что хочешь иметь. Так будет понятнее.
А.С.> нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
Андрей, тревожно мне. Почитай чего-нибудь. Немонотоннсоть и нелинейность - это не одно и то же. И немонотонность можно скомпенсировать, а ограничение - нет.
А.С.> А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП.
Понятно. Чем ограничена полоса входного сигнала?
Выкладывай полученные данные, может, угляжу чего.
ПыСы. Сними хоть бы 1к выб\сек, кусок минуту-другую после прогрева, а то нифига не понятно, что у тебя там творится-то.
А.С.>> А данные, которым минута от роду, оказываются уже вредными.
pokos> Дык, ты за минуту 100 отсчётов делаешь?????!!!!
Нет, за минуту я делаю 600 отсчётов. 10 сэмплов в секунду.
А.С.>> Но эксперимент показал, что сто лучше, чем тысяча...
pokos> Значит, условия эксперимента такие. Пока ты не устранишь неслучайные факторы, так и будет.
Этот неслучайный фактор и есть дрейф выходного сигнала гироскопа.
А.С.>> .... Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка.
pokos> Блин, а масштаб-то здесь причём!? Я про ДД, а не про масштаб!
Как - причём? Динамический диапазон-то у меня ограничивает датчик, а не АЦП! Если бы у меня был датчик со шкалой 15 градусов в секунду, всё бы и так работало! Правда, при условии, что всё уменьшилось бы пропорционально полной шкале. Понимаешь, для датчика, у которого шкала плюс-минус триста градусов в секунду, он вполне хорош - он может сосчитать обороты грампластинки-гиганта и ошибиться лишь на один-два, и это - хорошая точность для безопорного и безпривязочного измерения.
А.С.>> А у датчика выход дифференциальный, как и вход у АЦП.
pokos> Прекрасно. Нащщёт смещения нуля-то как?
Дык плавает оно! С чем мы и пытаемся бороться!
А.С.>> Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени.
pokos> Поясни, что ты считаешь "грамотной". А лучше, нарисуй, что ты имеешь и что хочешь иметь. Так будет понятнее.
Не знаю, когда строют широкополосный усилитель, делают в каскаде такую фигню, чтобы полка не заваливалась из-за дифференцирования. Вот и мне нужно что-то подобное. Т.е. если я вставлю между входом АЦП и выходом датчика конденсатор на 0,47 микрофарады, как в даташите нарисовано, я просто отрежу интересующую меня область, но и проблем с дрейфом нуля не будет. А, если я вставлю 40 микрофарад (4х10, если честно, ну нет у меня хорошей керамики на такие ёмкости, а плохая керамика хуже электролита), я зацеплю примерно одну декаду из интересующей области, а вторую как вытаскивать?
А.С.>> нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
pokos> Андрей, тревожно мне. Почитай чего-нибудь. Немонотоннсоть и нелинейность - это не одно и то же. И немонотонность можно скомпенсировать, а ограничение - нет.
Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься. А ограничение - частный случай немонотонности. И отнюдь не прерогатива цифровых схем.
А.С.>> А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП.
pokos> Понятно. Чем ограничена полоса входного сигнала?
Встроенным фильтром АЦП. Полоса по -3 дБ - 2.62 Гц. Плюс RC цепочкой из двух токоограничивающих резисторов (200 Ом) и входной ёмкости АЦП (20 пикофарад, что ли...) Известно, что у датчика есть помеха на 22-25 кГц, но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
pokos> Выкладывай полученные данные, может, угляжу чего.
А в каком виде?")
pokos> ПыСы. Сними хоть бы 1к выб\сек, кусок минуту-другую после прогрева, а то нифига не понятно, что у тебя там творится-то.
Не могу. Точнее, могу, но АЦП в таком режиме шумит на 11 разрядов, мы ничего в шумах АЦП не разглядим.
pokos> Дык, ты за минуту 100 отсчётов делаешь?????!!!!
Нет, за минуту я делаю 600 отсчётов. 10 сэмплов в секунду.
А.С.>> Но эксперимент показал, что сто лучше, чем тысяча...
pokos> Значит, условия эксперимента такие. Пока ты не устранишь неслучайные факторы, так и будет.
Этот неслучайный фактор и есть дрейф выходного сигнала гироскопа.
А.С.>> .... Датчик-то на 300 градусов в секунду! Это ещё лишних два с половиной порядка.
pokos> Блин, а масштаб-то здесь причём!? Я про ДД, а не про масштаб!
Как - причём? Динамический диапазон-то у меня ограничивает датчик, а не АЦП! Если бы у меня был датчик со шкалой 15 градусов в секунду, всё бы и так работало! Правда, при условии, что всё уменьшилось бы пропорционально полной шкале. Понимаешь, для датчика, у которого шкала плюс-минус триста градусов в секунду, он вполне хорош - он может сосчитать обороты грампластинки-гиганта и ошибиться лишь на один-два, и это - хорошая точность для безопорного и безпривязочного измерения.
А.С.>> А у датчика выход дифференциальный, как и вход у АЦП.
pokos> Прекрасно. Нащщёт смещения нуля-то как?
Дык плавает оно! С чем мы и пытаемся бороться!
А.С.>> Мне нужна грамотная частотная коррекция в области угловых скоростей в районе минуты дуги в секунду времени.
pokos> Поясни, что ты считаешь "грамотной". А лучше, нарисуй, что ты имеешь и что хочешь иметь. Так будет понятнее.
Не знаю, когда строют широкополосный усилитель, делают в каскаде такую фигню, чтобы полка не заваливалась из-за дифференцирования. Вот и мне нужно что-то подобное. Т.е. если я вставлю между входом АЦП и выходом датчика конденсатор на 0,47 микрофарады, как в даташите нарисовано, я просто отрежу интересующую меня область, но и проблем с дрейфом нуля не будет. А, если я вставлю 40 микрофарад (4х10, если честно, ну нет у меня хорошей керамики на такие ёмкости, а плохая керамика хуже электролита), я зацеплю примерно одну декаду из интересующей области, а вторую как вытаскивать?
А.С.>> нелинейность скомпенсировать можно, но это - не нелинейность, а немонотонность.
pokos> Андрей, тревожно мне. Почитай чего-нибудь. Немонотоннсоть и нелинейность - это не одно и то же. И немонотонность можно скомпенсировать, а ограничение - нет.
Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься. А ограничение - частный случай немонотонности. И отнюдь не прерогатива цифровых схем.
А.С.>> А там нет никакой обвески - выход датчика напрямую подключён ко входу АЦП.
pokos> Понятно. Чем ограничена полоса входного сигнала?
Встроенным фильтром АЦП. Полоса по -3 дБ - 2.62 Гц. Плюс RC цепочкой из двух токоограничивающих резисторов (200 Ом) и входной ёмкости АЦП (20 пикофарад, что ли...) Известно, что у датчика есть помеха на 22-25 кГц, но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
pokos> Выкладывай полученные данные, может, угляжу чего.
А в каком виде?
pokos> ПыСы. Сними хоть бы 1к выб\сек, кусок минуту-другую после прогрева, а то нифига не понятно, что у тебя там творится-то.
Не могу. Точнее, могу, но АЦП в таком режиме шумит на 11 разрядов, мы ничего в шумах АЦП не разглядим.
Это сообщение редактировалось 27.12.2005 в 16:18
А.С.> Как - причём? Динамический диапазон-то у меня ограничивает датчик,
Динамический диапазон у тебя ограничивает ракета, если, конечно, не авария.
А.С.> .....Т.е. если я вставлю между входом АЦП и выходом датчика конденсатор на 0,47 микрофарады,...а вторую как вытаскивать?
Тот фильтр, который я тебе показал, именно этим и занимается. Он вытаскивает постоянную составляющую, а точнее, сигнал с частотами ниже заданной. Фильтр этот - первого порядка, самое главное в нём то, что он заведомо лучше любого резюка с кондюком - нет паразитных параметров, да ещё частоту среза можно регулировать.
А.С.> Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься.
Я - знаю, потому что имею значение сигнала.
А.С.> ....но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
А её интермодуляции с частотой дискретизации?
А.С.> А в каком виде?
В машиночитаемом. Можно в Екселе.
Динамический диапазон у тебя ограничивает ракета, если, конечно, не авария.
А.С.> .....Т.е. если я вставлю между входом АЦП и выходом датчика конденсатор на 0,47 микрофарады,...а вторую как вытаскивать?
Тот фильтр, который я тебе показал, именно этим и занимается. Он вытаскивает постоянную составляющую, а точнее, сигнал с частотами ниже заданной. Фильтр этот - первого порядка, самое главное в нём то, что он заведомо лучше любого резюка с кондюком - нет паразитных параметров, да ещё частоту среза можно регулировать.
А.С.> Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься.
Я - знаю, потому что имею значение сигнала.
А.С.> ....но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
А её интермодуляции с частотой дискретизации?
А.С.> А в каком виде?
В машиночитаемом.
Можно в Екселе.
Это вы собрались в форум сырые данные заливать? Может, лучше в частной переписке?
Не нужно в частной переписке. Это всем полезно.
А.С.>> Как - причём? Динамический диапазон-то у меня ограничивает датчик,
pokos> Динамический диапазон у тебя ограничивает ракета, если, конечно, не авария.
По вращению - нет Ладно, это софистика. Я хотел сказать, что беды от неподходящего датчика, а подходящий стоит совсем других денег.
Ладно, это софистика. Я хотел сказать, что беды от неподходящего датчика, а подходящий стоит совсем других денег.
А.С.>> Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься.
pokos> Я - знаю, потому что имею значение сигнала.
Да ну? Применительно к нашему гироскопу - известно, что его выходной сигнал приблизительно линеен до плюс-минус300 град/с, но и дальше некоторое время растёт, а затем (при 7 оборотах в секунду, примерно) скачком переходит в противоположное состояние - мы попали на вторую ветвь характеристики, грубо говоря, во вторую пучность акустической стоячей волны. Как при аварии ракеты определить, что мы вращаемся со скоростью 10 градусов в секунду, а не 2500?
А.С.>> ....но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
pokos> А её интермодуляции с частотой дискретизации?
Тоже нет. Ибо относительная ширина всех полос пропускания, вместе взятых, составляет 0.027%
А.С.>> А в каком виде?
pokos> В машиночитаемом. Можно в Екселе.
В эксель ты уж лучше сам импортируй, я вот тебе в текстовом выведу. Первое число - температура с датчика TMP03, абсолютное значение некалиброванное, но с линейностью у него всё в порядке, а второе - код с АЦП безо всякой обработки. ГИРОСКОП ПОКОИТСЯ
pokos> Динамический диапазон у тебя ограничивает ракета, если, конечно, не авария.
По вращению - нет
Ладно, это софистика. Я хотел сказать, что беды от неподходящего датчика, а подходящий стоит совсем других денег.А.С.>> Немонотонность скомпенсировать нельзя, ибо ты не знаешь, на какой ветви характеристики находишься.
pokos> Я - знаю, потому что имею значение сигнала.
Да ну? Применительно к нашему гироскопу - известно, что его выходной сигнал приблизительно линеен до плюс-минус300 град/с, но и дальше некоторое время растёт, а затем (при 7 оборотах в секунду, примерно) скачком переходит в противоположное состояние - мы попали на вторую ветвь характеристики, грубо говоря, во вторую пучность акустической стоячей волны. Как при аварии ракеты определить, что мы вращаемся со скоростью 10 градусов в секунду, а не 2500?
А.С.>> ....но в диапазон паразитного пропускания АЦП (19,2 кГц плюс-минус 2,62 Гц) она не попадает.
pokos> А её интермодуляции с частотой дискретизации?
Тоже нет. Ибо относительная ширина всех полос пропускания, вместе взятых, составляет 0.027%
А.С.>> А в каком виде?
pokos> В машиночитаемом.
Можно в Екселе. В эксель ты уж лучше сам импортируй, я вот тебе в текстовом выведу. Первое число - температура с датчика TMP03, абсолютное значение некалиброванное, но с линейностью у него всё в порядке, а второе - код с АЦП безо всякой обработки. ГИРОСКОП ПОКОИТСЯ
Прикреплённые файлы:
RESULT8CDE.txt (скачать)
[303 кБ]
Это сообщение редактировалось 28.12.2005 в 14:25
А.С.> В эксель ты уж лучше сам импортируй, я вот тебе в текстовом выведу.
Импортну, без проблем.... Кроме одной - РАРа нет у меня. На компе корпоративная заливка, если не сложно, то в ЗИПе переделай, пож-ста.
Убегаю от интернета, кстати, в ЧипоДип. Завтра буду, всем успехов...
Импортну, без проблем.... Кроме одной - РАРа нет у меня. На компе корпоративная заливка, если не сложно, то в ЗИПе переделай, пож-ста.
Убегаю от интернета, кстати, в ЧипоДип. Завтра буду, всем успехов...
готово, бери! вставил в предыдущее сообщение.
Да, в виде приложенных файлов, конечно, удобнее.
Мне, честно говоря, кажется, что это всё же пока предварительные результаты. Надо попробовать разные чипы - и желательно побольше разных; существенное превосхождение даташитов настораживает.
А.С.> готово, бери! вставил в предыдущее сообщение. [»]
Андрей, опять Авиабаза ЗИПы крючит, не открываются. Переименуй его, пожста, в тхт. Я так делал, помогло.
Андрей, опять Авиабаза ЗИПы крючит, не открываются. Переименуй его, пожста, в тхт. Я так делал, помогло.
А.С.>> готово, бери! вставил в предыдущее сообщение. [»]
pokos> Андрей, опять Авиабаза ЗИПы крючит, не открываются. Переименуй его, пожста, в тхт. Я так делал, помогло.
Сделал, пробуй, не забудь переименовать обратно. я сталкивался ещё с другим явлением - скачанный файл был поверх зипа запакован гзипом, нужно было переименовать скачанный файл из *.zip в *.zip.gz, тогда удавалось его разархивировать.
В том же сообщении.
Мда. Лучше не стало. Может, я тебе его почтой пошлю?
pokos> Андрей, опять Авиабаза ЗИПы крючит, не открываются. Переименуй его, пожста, в тхт. Я так делал, помогло.
Сделал, пробуй, не забудь переименовать обратно. я сталкивался ещё с другим явлением - скачанный файл был поверх зипа запакован гзипом, нужно было переименовать скачанный файл из *.zip в *.zip.gz, тогда удавалось его разархивировать.
В том же сообщении.
Мда. Лучше не стало. Может, я тебе его почтой пошлю?
А.С.> Мда. Лучше не стало. Может, я тебе его почтой пошлю? [»]
Спасибо, у меня открылось. Начинаю вкуривать.
Корреляция с температурой слабая, 0,230181653
Вкуриваю спектр, какая частота выборки была?
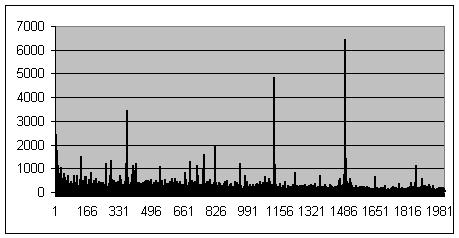
Предварительный вкур спектра в файле. Иголки не нравятся. Чтобы всосать все значения, придётся писать инструмент. Матлаба у меня, к сож., нету.
Спасибо, у меня открылось. Начинаю вкуривать.
Корреляция с температурой слабая, 0,230181653
Вкуриваю спектр, какая частота выборки была?
Предварительный вкур спектра в файле. Иголки не нравятся. Чтобы всосать все значения, придётся писать инструмент. Матлаба у меня, к сож., нету.
Прикреплённые файлы:
Это сообщение редактировалось 28.12.2005 в 15:28
А.С.>> Мда. Лучше не стало. Может, я тебе его почтой пошлю? [»]
pokos> Спасибо, у меня открылось. Начинаю вкуривать.
pokos> Корреляция с температурой слабая, 0,230181653
pokos> Вкуриваю спектр, какая частота выборки была? [»]
Частота выборки 10 Гц, я уже говорил, характеристика фильтра sin3, первый ноль приходится как раз на частоту выборки, и дальше они идут через каждые 10 Гц до частоты 19200 Гц, на которой паразитный максимум.
Т.е. результирующий спектр сигнала завален, на частоте 2,62 Гц он завален на 3 дБ. Чтоб вернуть "исходный", надо делать подъём. Но мне, IMHO, это пока не нужно. Частоту выборки можно поднять раз в 10, но не в 100. При 100 Гц эффективная разрядность АЦП будет 17-18 бит.
Подавление в "нулях" фильтра - 160...200 дб, между первым и вторым "нулями" - 40 дБ, дальше растёт и достигает -80 дБ между 6 и 7 "нулями" и дальше уже, видимо, не растёт.
pokos> Спасибо, у меня открылось. Начинаю вкуривать.
pokos> Корреляция с температурой слабая, 0,230181653
pokos> Вкуриваю спектр, какая частота выборки была? [»]
Частота выборки 10 Гц, я уже говорил, характеристика фильтра sin3, первый ноль приходится как раз на частоту выборки, и дальше они идут через каждые 10 Гц до частоты 19200 Гц, на которой паразитный максимум.
Т.е. результирующий спектр сигнала завален, на частоте 2,62 Гц он завален на 3 дБ. Чтоб вернуть "исходный", надо делать подъём. Но мне, IMHO, это пока не нужно. Частоту выборки можно поднять раз в 10, но не в 100. При 100 Гц эффективная разрядность АЦП будет 17-18 бит.
Подавление в "нулях" фильтра - 160...200 дб, между первым и вторым "нулями" - 40 дБ, дальше растёт и достигает -80 дБ между 6 и 7 "нулями" и дальше уже, видимо, не растёт.
Это сообщение редактировалось 28.12.2005 в 15:36
Корреляция с температурой сильная, когда речь идёт о полуградусе и больше, но нелинейная. Сначала с ростом температуры код растёт медленно (примерно 12 LSB на градус) затем быстрее (аж до 75 LSB на градус), а потом опять уменьшается до 50 LSB на градус...
Кроме того, рост кода при быстром росте температуры может отставать. Постоянная времени на глаз - секунд 20-30
Кроме того, рост кода при быстром росте температуры может отставать. Постоянная времени на глаз - секунд 20-30
Это сообщение редактировалось 28.12.2005 в 16:02
А.С.> Частота выборки 10 Гц, я уже говорил, характеристика фильтра sin3,
Ну, фильтр мне мало интересен, пока я ищу артефакты. И нахожу их в виде иголок в спектре. Если есть возможность, посмотри на выход датчика хоть бы звуковой картой, меня интересует более высокочастотная часть спектра. По причине наводок и др. байды.
Ну, фильтр мне мало интересен, пока я ищу артефакты. И нахожу их в виде иголок в спектре. Если есть возможность, посмотри на выход датчика хоть бы звуковой картой, меня интересует более высокочастотная часть спектра. По причине наводок и др. байды.
Реклама Google — средство выживания форумов :)
А.С.>> Частота выборки 10 Гц, я уже говорил, характеристика фильтра sin3,
pokos> Ну, фильтр мне мало интересен, пока я ищу артефакты. И нахожу их в виде иголок в спектре. Если есть возможность, посмотри на выход датчика хоть бы звуковой картой, меня интересует более высокочастотная часть спектра. По причине наводок и др. байды.
А чем ты делал этот спектр? Вид явно экселевский, но в экселе среди функций FFT я не вижу
Посмотреть звуковой картой - не вопрос, но там привязать сложно, реперов нету.
pokos> Ну, фильтр мне мало интересен, пока я ищу артефакты. И нахожу их в виде иголок в спектре. Если есть возможность, посмотри на выход датчика хоть бы звуковой картой, меня интересует более высокочастотная часть спектра. По причине наводок и др. байды.
А чем ты делал этот спектр? Вид явно экселевский, но в экселе среди функций FFT я не вижу
Посмотреть звуковой картой - не вопрос, но там привязать сложно, реперов нету.
Copyright © Balancer 1997..2018
Создано 27.12.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 27.12.2005
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
