-
/1358619-size-comparison.jpg)
МиГ-31 vs F-14 Tomcat
Теги:
 Dio69
Dio69

Максимка> Привет!
Максимка> Как отличаются дальности обнаружения у AWG-9 и APG-71? [»]
Частенько почему-то народ забывает, что дальность в РЛС не может быть произвольной. Часто упоминались цифры для Заслона от 75 до 400 км.
Например для импульсно-доплеровских РЛС это определяется количеством доплеровских фильтров и методикой их пересчёта. А вовсе не энергетическими параметрами сигнала, потому как это не теоретическое, а вполне земное, практическое устройство. Поэтому например для Н019 (для Н001 несколько больше) Дмах определена немного больше 100 км. В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС). Цель на расстоянии 130 км увидеть нельзя не потому, что ЭПР маленькая, а потому как измерения не производятся в этом диапазоне, пусть хоть это дирижабль с 10000 кв.м. Ведь ваши домашние напольные весы не измеряют вес в диапазоне 500-800 кг...
")
Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Максимка> Как отличаются дальности обнаружения у AWG-9 и APG-71? [»]
Частенько почему-то народ забывает, что дальность в РЛС не может быть произвольной. Часто упоминались цифры для Заслона от 75 до 400 км.
Например для импульсно-доплеровских РЛС это определяется количеством доплеровских фильтров и методикой их пересчёта. А вовсе не энергетическими параметрами сигнала, потому как это не теоретическое, а вполне земное, практическое устройство. Поэтому например для Н019 (для Н001 несколько больше) Дмах определена немного больше 100 км. В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС). Цель на расстоянии 130 км увидеть нельзя не потому, что ЭПР маленькая, а потому как измерения не производятся в этом диапазоне, пусть хоть это дирижабль с 10000 кв.м. Ведь ваши домашние напольные весы не измеряют вес в диапазоне 500-800 кг...
Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
 инфо
инфо инструменты
инструменты
ель на расстоянии 130 км увидеть нельзя не потому, что ЭПР маленькая, а потому как измерения не производятся в этом диапазоне, пусть хоть это дирижабль с 10000 кв.м.
Вы об инструментальной дальности говорите. Она ограничивается сверху периодом следования импульса или периодом модуляции несущей.
В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС).
Значение радиальной скорости как таковое на дальность обнаружения не влияет, так как допплеровские фильтры в полосе интересующих нас ДЧ должны иметь ровную АЧХ, давить только околонулевую полоску, ноль в данном случае не нулевая ДЧ, а ДЧ от МО по ГЛ. Хотя для систем, использующих разные наборы ЧПИ (не типы ЧПИ) за период облучения для устранения неодназначностей, характерна разная наблюдаемость ДЧ, но тут она не линейно зависимый то частоты характер имеет.
Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Так вот тут и слабость наших ИД БРЛС МиГов и Су - отсутствие режима обнражения ВЦ без допплеровской обработки сигнала при поиске на фоне свободного пространства, поэтому цели с малыми радиальными скоростями никак не обнаруживаются. У американских БРЛС аналогичного назначения такой режим есть - "Look up".
Следующий шаг в эволюции РЛС - использовани в РЛС электронно и соответственно быстро сканирующих АФАР, формирующих сразу множество лучей, обнаруживающих и запоминающих множество отметок и быстро обновляющих данные о них. Сверхмощные бортовые ЭВМ будут завязывть их в трассы и искать и выделять перемещающиеся объекты, не взирая на ДЧ, получаемую от них.
а о зависшем вертолёте можно вообще и не мечтать.
Вот тут да. Только если он зависс на малой высоте. Встречал упоминание о том, что СОУ Бука может видеть зависшие вертолёты по допплеровскому сдвигу от вращающихся лопастей, но на очень малых дистанциях, ведь ЭПР-то у них мала, хотя и будут иметь место переотражения "лопасть-корпус".
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.
Это сообщение редактировалось 09.12.2005 в 18:31
Dio69> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Угу. Сами додумались? Или у вас вертолет висит с неподвижными лопастями-на веревочке?
Угу. Сами додумались? Или у вас вертолет висит с неподвижными лопастями-на веревочке?
 Вуду
Вуду

Dio69> Частенько почему-то народ забывает, что дальность в РЛС не может быть произвольной. Часто упоминались цифры для Заслона от 75 до 400 км.
Dio69> Например для импульсно-доплеровских РЛС это определяется количеством доплеровских фильтров и методикой их пересчёта. А вовсе не энергетическими параметрами сигнала, потому как это не теоретическое, а вполне земное, практическое устройство. Поэтому например для Н019 (для Н001 несколько больше) Дмах определена немного больше 100 км. В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС). Цель на расстоянии 130 км увидеть нельзя не потому, что ЭПР маленькая, а потому как измерения не производятся в этом диапазоне, пусть хоть это дирижабль с 10000 кв.м. Ведь ваши домашние напольные весы не измеряют вес в диапазоне 500-800 кг...
- Ну и чушь же Вы несёте, почтенный... И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o
И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o
Dio69> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
- Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...")
Dio69> Например для импульсно-доплеровских РЛС это определяется количеством доплеровских фильтров и методикой их пересчёта. А вовсе не энергетическими параметрами сигнала, потому как это не теоретическое, а вполне земное, практическое устройство. Поэтому например для Н019 (для Н001 несколько больше) Дмах определена немного больше 100 км. В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС). Цель на расстоянии 130 км увидеть нельзя не потому, что ЭПР маленькая, а потому как измерения не производятся в этом диапазоне, пусть хоть это дирижабль с 10000 кв.м. Ведь ваши домашние напольные весы не измеряют вес в диапазоне 500-800 кг...
- Ну и чушь же Вы несёте, почтенный...
И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o Dio69> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
- Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...
Кто и где Вас научил так неправильно? Расскажите, не стесняйтесь.
“The only good Indian is a dead Indian”
Dio69>> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Конструктор> Угу. Сами додумались? Или у вас вертолет висит с неподвижными лопастями-на веревочке? [»]
А при чём тут движущиеся лопасти? Может Вы сможете доплеровский спектр от их движения выделить? Интересно чем? Каким конкретно устройством? Может назовёте его тип (я не говоря про конкретное название)? В какой РЛС стоит это чудо дивное????
Конструктор> Угу. Сами додумались? Или у вас вертолет висит с неподвижными лопастями-на веревочке?
[»]А при чём тут движущиеся лопасти? Может Вы сможете доплеровский спектр от их движения выделить? Интересно чем? Каким конкретно устройством? Может назовёте его тип (я не говоря про конкретное название)? В какой РЛС стоит это чудо дивное????
Вуду> - Ну и чушь же Вы несёте, почтенный... И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o
Читайте ТО Н019
Dio69>> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Вуду> - Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...
Увы, но за свою жизнь с приличными БРЛС мне сталкиваться не приходилось
Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
Вуду>
Злобные советские преподаватели...
И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o Читайте ТО Н019
Dio69>> Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
Вуду> - Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...
Увы, но за свою жизнь с приличными БРЛС мне сталкиваться не приходилось
Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
Вуду>
Кто и где Вас научил так неправильно? Расскажите, не стесняйтесь.
[»]Злобные советские преподаватели...
- Ну и чушь же Вы несёте, почтенный... И кто же Вам сказал, что "измерения не производят в том диапазоне"??
Вы знаете что такое инструментальная дальность РЛС? Вообще-то она ТТХ на каждое изделие указывается.
А при чём тут движущиеся лопасти? Может Вы сможете доплеровский спектр от их движения выделить? Интересно чем? Каким конкретно устройством? Может назовёте его тип (я не говоря про конкретное название)? В какой РЛС стоит это чудо дивное????
Почитайте об РЛС, исп-мых в Торе, Тунгусске, Буке. Там вроде бы для некоторых из них дальность обнаружения зависших вертолётов отдельно указана.
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.
sabakka> Вы об инструментальной дальности говорите. Она ограничивается сверху периодом следования импульса или периодом модуляции несущей.
sabakka>
Я имею ввиду не импульсную, а импульсно-доплеровскую РЛС с квазинепрерывным сигналом.
sabakka> Значение радиальной скорости как таковое на дальность обнаружения не влияет, так как допплеровские фильтры в полосе интересующих нас ДЧ должны иметь ровную АЧХ, давить только околонулевую полоску, ноль в данном случае не нулевая ДЧ, а ДЧ от МО по ГЛ. Хотя для систем, использующих разные наборы ЧПИ (не типы ЧПИ) за период облучения для устранения неодназначностей, характерна разная наблюдаемость ДЧ, но тут она не линейно зависимый то частоты характер имеет.
Именно потому, что доплеровский сдвиг сигнала выше при сближении с целью, потому и дальность обнаружения в ППС выше чем в ЗПС.
В рекламных целях обычно лукавят и указывают Дмах в ППС, хотя в среднем она конечно ниже.
sabakka>
sabakka> Так вот тут и слабость наших ИД БРЛС МиГов и Су - отсутствие режима обнражения ВЦ без допплеровской обработки сигнала при поиске на фоне свободного пространства, поэтому цели с малыми радиальными скоростями никак не обнаруживаются. У американских БРЛС аналогичного назначения такой режим есть - "Look up".
Если помните, пару лет назад Австрия объявила тендер на закупку 30 лёгких истребителей для целей ПВО. Основными претендентами были американцы с Ф-16, наши с Миг-29 и шведы со своими Гриппенами. Не помню уже за давностью лет, но почему-то французы там тоже не особо рассматривались, хотя и были приглашены на тендер.
Круг задач для самолётов был обозначен сразу - обнаружение и перехват малоразмерных летательных аппаратов, в том числе
- спортивных самолётов.
- вертолётов, в том числе зависших.
Также требовалось
- высокая наработка на отказ.
- высокие ресурсные показатели.
- ещё куча менее интересных требований.
Американцы отвалили практически сразу отказавшись учавствовать в тендере. Их мотивация прямая как топор:"А нам соревноваться ни с кем не надо. Мы и так знаем, что наши самолёты самые лучшие. А если Вам это непонятно - то мы и не навязываемся. Не хотите - не берите. Это мы вам делаем одолжение продавая свои самолёты. Уговаривать не будем. До свидания..."
Исходя из требований по спортивным самолётам и вертолётам, сразу стало ясно, что наш 29-й, со своей Н019 не пройдёт однозначно и предлагать его - чистая авантюра с заранее известным концом, но попытку РСК всё равно предпринял. Даже ВВП втянули в это дело. Но это не помогло ибо просто не могло помочь. Хотя с точки зрения австрияков, это сыграло свою роль - срубили цену шведам (а может такая цель и преследовалась с самого начала? )
Козе понятно было ещё до всяких тендеров, что выиграют шведы, хотя и американцы могли выкинуть конёк.
А весь вопрос-то был прост:"Можете или не можете работать по малой авиации и вертолётам? У нас это основные цели, с которыми нам надо бороться. Всё остальное нас не очень интересует - нам не с кем воевать "по-взрослому". Итак да или нет?"
Чуда не случилось.
sabakka> Следующий шаг в эволюции РЛС - использовани в РЛС электронно и соответственно быстро сканирующих АФАР, формирующих сразу множество лучей, обнаруживающих и запоминающих множество отметок и быстро обновляющих данные о них. Сверхмощные бортовые ЭВМ будут завязывть их в трассы и искать и выделять перемещающиеся объекты, не взирая на ДЧ, получаемую от них.
sabakka>
Ну это пока в теории. Ни ФАР нормальных, ни АФАР пока у нас делать не научились. Была тут самоделка типа "Перо", поставили было на Су-27. Теперь на помойке валяется. Про бортовые ЭВМ и тем более пока только на рекламных буклетах на МАКСах.
sabakka> Вот тут да. Только если он зависс на малой высоте. Встречал упоминание о том, что СОУ Бука может видеть зависшие вертолёты по допплеровскому сдвигу от вращающихся лопастей, но на очень малых дистанциях, ведь ЭПР-то у них мала, хотя и будут иметь место переотражения "лопасть-корпус". [»]
Честно говоря никогда не слышал (может кто поправит), что бы в наших действующих РЛС, были какие-либо устройства анализа тонкого спектра, вызванного модуляцией винтов, лопаток, вибрациями. Книжек пыльных про это написано тьма. В железе никогда не слышал. Посему думаю, что это не более чем теоретическая болтовня.
Кто зает - поправьте, буду признателен.
sabakka>
В реальности 65-90 км (и то при больших радиальных скоростях, т.е. ППС).
Я имею ввиду не импульсную, а импульсно-доплеровскую РЛС с квазинепрерывным сигналом.
sabakka> Значение радиальной скорости как таковое на дальность обнаружения не влияет, так как допплеровские фильтры в полосе интересующих нас ДЧ должны иметь ровную АЧХ, давить только околонулевую полоску, ноль в данном случае не нулевая ДЧ, а ДЧ от МО по ГЛ. Хотя для систем, использующих разные наборы ЧПИ (не типы ЧПИ) за период облучения для устранения неодназначностей, характерна разная наблюдаемость ДЧ, но тут она не линейно зависимый то частоты характер имеет.
Именно потому, что доплеровский сдвиг сигнала выше при сближении с целью, потому и дальность обнаружения в ППС выше чем в ЗПС.
В рекламных целях обычно лукавят и указывают Дмах в ППС, хотя в среднем она конечно ниже.
sabakka>
Именно из-за принципа обработки сигнала, ни одна наша бортовая РЛС не может увидеть тихоходные цели, а о зависшем вертолёте можно вообще и не мечтать.
sabakka> Так вот тут и слабость наших ИД БРЛС МиГов и Су - отсутствие режима обнражения ВЦ без допплеровской обработки сигнала при поиске на фоне свободного пространства, поэтому цели с малыми радиальными скоростями никак не обнаруживаются. У американских БРЛС аналогичного назначения такой режим есть - "Look up".
Если помните, пару лет назад Австрия объявила тендер на закупку 30 лёгких истребителей для целей ПВО. Основными претендентами были американцы с Ф-16, наши с Миг-29 и шведы со своими Гриппенами. Не помню уже за давностью лет, но почему-то французы там тоже не особо рассматривались, хотя и были приглашены на тендер.
Круг задач для самолётов был обозначен сразу - обнаружение и перехват малоразмерных летательных аппаратов, в том числе
- спортивных самолётов.
- вертолётов, в том числе зависших.
Также требовалось
- высокая наработка на отказ.
- высокие ресурсные показатели.
- ещё куча менее интересных требований.
Американцы отвалили практически сразу отказавшись учавствовать в тендере. Их мотивация прямая как топор:"А нам соревноваться ни с кем не надо. Мы и так знаем, что наши самолёты самые лучшие. А если Вам это непонятно - то мы и не навязываемся. Не хотите - не берите. Это мы вам делаем одолжение продавая свои самолёты. Уговаривать не будем. До свидания..."
Исходя из требований по спортивным самолётам и вертолётам, сразу стало ясно, что наш 29-й, со своей Н019 не пройдёт однозначно и предлагать его - чистая авантюра с заранее известным концом, но попытку РСК всё равно предпринял. Даже ВВП втянули в это дело. Но это не помогло ибо просто не могло помочь. Хотя с точки зрения австрияков, это сыграло свою роль - срубили цену шведам (а может такая цель и преследовалась с самого начала?
)Козе понятно было ещё до всяких тендеров, что выиграют шведы, хотя и американцы могли выкинуть конёк.
А весь вопрос-то был прост:"Можете или не можете работать по малой авиации и вертолётам? У нас это основные цели, с которыми нам надо бороться. Всё остальное нас не очень интересует - нам не с кем воевать "по-взрослому". Итак да или нет?"
Чуда не случилось.
sabakka> Следующий шаг в эволюции РЛС - использовани в РЛС электронно и соответственно быстро сканирующих АФАР, формирующих сразу множество лучей, обнаруживающих и запоминающих множество отметок и быстро обновляющих данные о них. Сверхмощные бортовые ЭВМ будут завязывть их в трассы и искать и выделять перемещающиеся объекты, не взирая на ДЧ, получаемую от них.
sabakka>
Ну это пока в теории. Ни ФАР нормальных, ни АФАР пока у нас делать не научились. Была тут самоделка типа "Перо", поставили было на Су-27. Теперь на помойке валяется. Про бортовые ЭВМ и тем более пока только на рекламных буклетах на МАКСах.
а о зависшем вертолёте можно вообще и не мечтать.
sabakka> Вот тут да. Только если он зависс на малой высоте. Встречал упоминание о том, что СОУ Бука может видеть зависшие вертолёты по допплеровскому сдвигу от вращающихся лопастей, но на очень малых дистанциях, ведь ЭПР-то у них мала, хотя и будут иметь место переотражения "лопасть-корпус". [»]
Честно говоря никогда не слышал (может кто поправит), что бы в наших действующих РЛС, были какие-либо устройства анализа тонкого спектра, вызванного модуляцией винтов, лопаток, вибрациями. Книжек пыльных про это написано тьма. В железе никогда не слышал. Посему думаю, что это не более чем теоретическая болтовня.
Кто зает - поправьте, буду признателен.
Вуду>> - Ну и чушь же Вы несёте, почтенный... И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o
Dio69> Читайте ТО Н019
- А больше - ничего на свете нет?? :o
Вуду>> - Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...
Dio69> Увы, но за свою жизнь с приличными БРЛС мне сталкиваться не приходилось
- Ну, в эпоху интернета, кто же Вам не даёт?
Dio69> Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
- Первый "тычок пальцем", навскидку, ЗРК:
// www.new-factoria.ru
Вот здесь, пост #55:
Форумы Авиабазы
Вуду>>
Dio69> Злобные советские преподаватели...
- Так назовите учебное заведение, Вы же здесь инкогнито, никто Вас вычислять не станет...
И кто же Вам сказал, что "измерения не производят в том диапазоне"?? :o Dio69> Читайте ТО Н019
- А больше - ничего на свете нет?? :o
Вуду>> - Вы и представить себе не можете, что у приличных БРЛС (и вообще у РЛС) есть несколько режимов работы...
Dio69> Увы, но за свою жизнь с приличными БРЛС мне сталкиваться не приходилось
- Ну, в эпоху интернета, кто же Вам не даёт?
Dio69> Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
- Первый "тычок пальцем", навскидку, ЗРК:
Зенитный ракетный комплекс LeFlaSys (ASRAD) | Ракетная техника
Зенитный ракетный комплекс LeFlaSys(ASRAD) Самоходный зенитный ракетный комплекс LeFlaSys (Light Mechanized Short Rang// www.new-factoria.ru
Вот здесь, пост #55:
Форумы Авиабазы
Вуду>>
Кто и где Вас научил так неправильно? Расскажите, не стесняйтесь.
Dio69> Злобные советские преподаватели...
- Так назовите учебное заведение, Вы же здесь инкогнито, никто Вас вычислять не станет...
“The only good Indian is a dead Indian”
Именно потому, что доплеровский сдвиг сигнала выше при сближении с целью, потому и дальность обнаружения в ППС выше чем в ЗПС.
В рекламных целях обычно лукавят и указывают Дмах в ППС, хотя в среднем она конечно ниже.
При использовании КНИ с ВЧП да, выше, чем те ДЧ, которые имеют отражения сигнала от земли, принимаемые по БЛ, посему в частотное области полезный сигнал и МО по БЛ не перекрываются и значит дальность обнаружения такая же, как и в свободном пространстве.
Короче, попросите Мухеля (muxel) теоретический материал, он, помню, год-два назад выкладывал очень подробную инфу по APG-66 и достаточно глубокую теорию по ИД РЛС.
Что там указывают в рекламных целях, это уже только они одни знают, но вряд ли цифру, большую, чем инструментальная дальность.
Я имею ввиду не импульсную, а импульсно-доплеровскую РЛС с квазинепрерывным сигналом.
Если мы хотим, чтоб ИД РЛС давала одназначную дальность, то надо либо менять ЧПИ, либо модулировать несущую, посему:
-при использовании КНИ сигнала с модуляцией несущей дальность ограничена периодом модуляции, при использовании
-при использовании КНИ сиигнала со сменными ЧПИ однозначно измеряемая дальность ограничена колчиством наборов ЧПИ, в общем, там же у Мухеля читайте.
Ну это пока в теории. Ни ФАР нормальных, ни АФАР пока у нас делать не научились. Была тут самоделка типа "Перо", поставили было на Су-27. Теперь на помойке валяется. Про бортовые ЭВМ и тем более пока только на рекламных буклетах на МАКСах.
Так это я не про наш авиа- и радар- пром.
естно говоря никогда не слышал (может кто поправит), что бы в наших действующих РЛС, были какие-либо устройства анализа тонкого спектра, вызванного модуляцией винтов, лопаток, вибрациями. Книжек пыльных про это написано тьма. В железе никогда не слышал. Посему думаю, что это не более чем теоретическая болтовня.
Ну тут надо выделять анализ ДЧ от лопаток и винтов для идентификации ЛА и анализ просто для того, чтоб просто выяснить, что что-то тут шевелится или вращается с достаточно большой скоростью. Первая задача - сложнее. Реализована в американских БРЛС APG-68, APG-63 и должно быть в APG-70. У нас нет. А вторая всё же проще.
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.
sabakka> Почитайте об РЛС, исп-мых в Торе, Тунгусске, Буке. Там вроде бы для некоторых из них дальность обнаружения зависших вертолётов отдельно указана. [»]
Честно говоря не очень осведомлён о режимах работы этих РЛС - они ведь наземные и задачи обнаруживать цели на фоне земли у них нет.
Но что касается Бука - попробую разобраться через пару месяцев.
Спасибо.
Честно говоря не очень осведомлён о режимах работы этих РЛС - они ведь наземные и задачи обнаруживать цели на фоне земли у них нет.
Но что касается Бука - попробую разобраться через пару месяцев.
Спасибо.
Тут не на "фоне земли", а в ячейках разрешения (дальность-азимут-угол места), в которых присутствуют также МО, как от земли, так и от диполей и прочей дряни и их от настоящей цели можно выделить только по ДЧ.
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.

Действительно
Прикреплённые файлы:
Вуду> - А больше - ничего на свете нет?? :o
Вуду> - Ну, в эпоху интернета, кто же Вам не даёт?
Я не доверяю тому, что пишут в инете. О тех вещах, которые я знаю лично - ни разу не читал реальной оценки похожей на правду. Как правило это журналистские статьи или перепечатки друг у друга рекламных данных, часто противоречащих друг другу.
В инете нет людей, которые своими руками разбирали, настраивали, ремонтировали, эксплуатировали, испытывали какие-нибудь американские РЛС. Поэтому то, что об этом пишут - на 99% мягко говоря не заслуживает никакого доверия. К тому же нельзя сбрасывать со счетов и банальную дезинформацию, которую распространяют владельцы новой техники в средствах СМИ (самому когда-то пришлось с этим разбираться полгода на самом полном серьёзе).
Мягко говоря вызывает улыбку сравнения наших и американских бортовых РЛС на форумах людьми, которые не трогали своими руками ни нашей техники, ни естественно американской. Как говаривал сатирик Жванецкий - "Попытка определить вкус еды на глаз..."
Dio69>> Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
Вуду> - Первый "тычок пальцем", навскидку, ЗРК:
Вуду> Зенитный ракетный комплекс LeFlaSys (ASRAD) | Ракетная техника
Вуду> Вот здесь, пост #55:
Спасибо почитаю, но... см. выше
Вуду> - Так назовите учебное заведение, Вы же здесь инкогнито, никто Вас вычислять не станет... [»]
Авиационный институт и авиационная академия - их не так много у нас...
Вуду> - Ну, в эпоху интернета, кто же Вам не даёт?
Я не доверяю тому, что пишут в инете. О тех вещах, которые я знаю лично - ни разу не читал реальной оценки похожей на правду. Как правило это журналистские статьи или перепечатки друг у друга рекламных данных, часто противоречащих друг другу.
В инете нет людей, которые своими руками разбирали, настраивали, ремонтировали, эксплуатировали, испытывали какие-нибудь американские РЛС. Поэтому то, что об этом пишут - на 99% мягко говоря не заслуживает никакого доверия. К тому же нельзя сбрасывать со счетов и банальную дезинформацию, которую распространяют владельцы новой техники в средствах СМИ (самому когда-то пришлось с этим разбираться полгода на самом полном серьёзе).
Мягко говоря вызывает улыбку сравнения наших и американских бортовых РЛС на форумах людьми, которые не трогали своими руками ни нашей техники, ни естественно американской. Как говаривал сатирик Жванецкий - "Попытка определить вкус еды на глаз..."
Dio69>> Может Вы мне подскажете название такой БРЛС, которая видит зависший вертолёт. И на каком типа ЛА она установлена. Я попробую ознакомиться с таковой.
Вуду> - Первый "тычок пальцем", навскидку, ЗРК:
Вуду> Зенитный ракетный комплекс LeFlaSys (ASRAD) | Ракетная техника
Вуду> Вот здесь, пост #55:
Спасибо почитаю, но... см. выше
Вуду> - Так назовите учебное заведение, Вы же здесь инкогнито, никто Вас вычислять не станет... [»]
Авиационный институт и авиационная академия - их не так много у нас...
YYKK> Действительно [»]
Увы, но та техника которая у нас есть - разработки середины 70-х годов, а технологически она сделана на уровне конец 60- начало 70-х...
А ведь реальный противник наших Миг-29 и Су-27 уже Ф-22 и Ф-35, которые уже начинают поступать в войска. Грустно это конечно...
[»]Увы, но та техника которая у нас есть - разработки середины 70-х годов, а технологически она сделана на уровне конец 60- начало 70-х...
А ведь реальный противник наших Миг-29 и Су-27 уже Ф-22 и Ф-35, которые уже начинают поступать в войска. Грустно это конечно...
Ну не стоит так принижатся.
Уже есть достаточно давно БРЛС совсем с иными свойствами.
Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс.
Уже есть достаточно давно БРЛС совсем с иными свойствами.
Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс.
 Вуду
Вуду
YYKK> Действительно
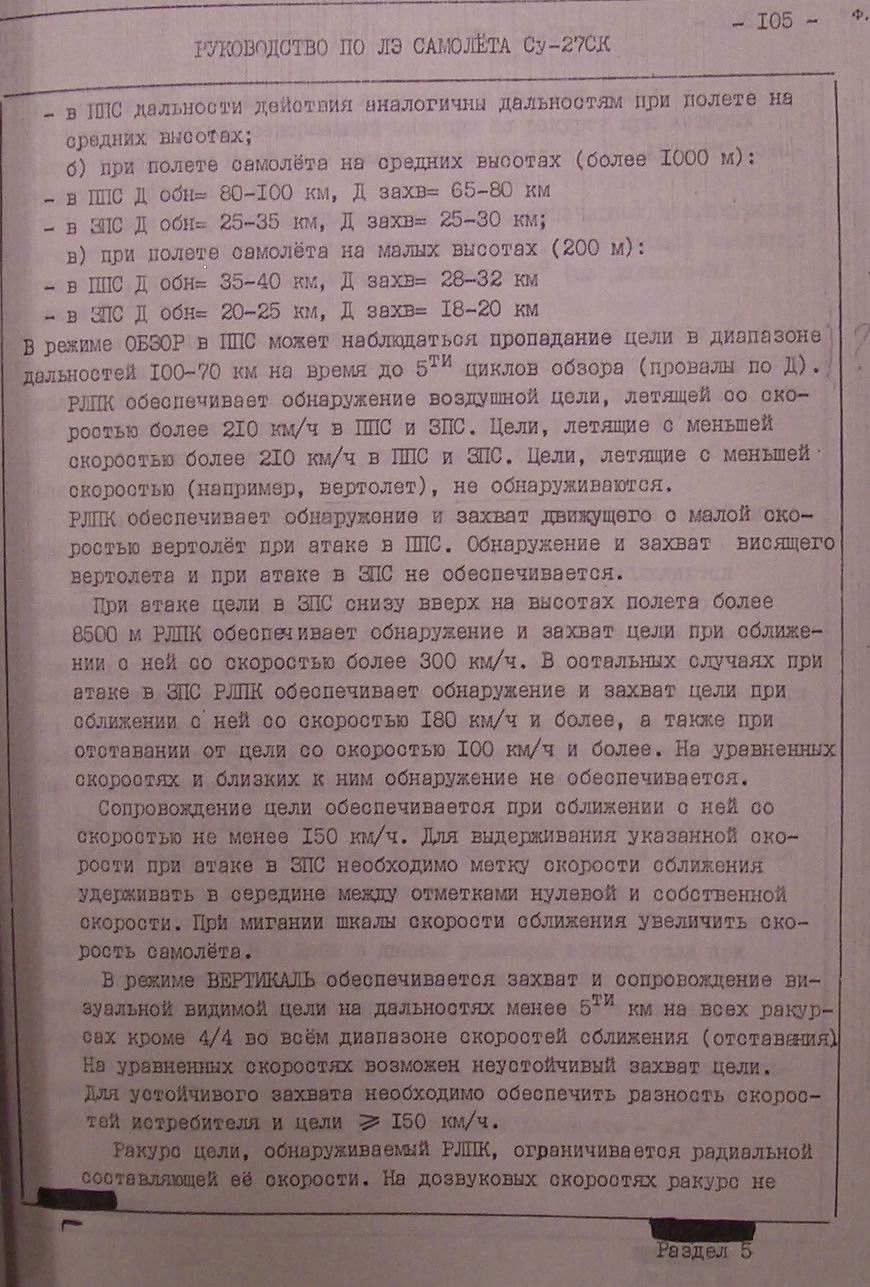
- Вообще-то страничка более чем удручающая, для БРЛС самолёта выпуска 1991 года... Страшная страничка-то.
Дальность обнаружения в заднюю полусферу 25-30 км (как минимум с ЭПР=5 кв м) - это полный неописуемый звиздец...
И мне ещё говорят, что я - очернитель советской авионики...
В сопоставлении с БРЛС F-14, старше на 20 лет:
http://www.jolly-rogers.com/airpower/f-14/f-14-av.htm
- Вообще-то страничка более чем удручающая, для БРЛС самолёта выпуска 1991 года... Страшная страничка-то.
Дальность обнаружения в заднюю полусферу 25-30 км (как минимум с ЭПР=5 кв м) - это полный неописуемый звиздец...
И мне ещё говорят, что я - очернитель советской авионики...
В сопоставлении с БРЛС F-14, старше на 20 лет:
http://www.jolly-rogers.com/airpower/f-14/f-14-av.htm
“The only good Indian is a dead Indian”
Это сообщение редактировалось 10.12.2005 в 00:20
 TbMA
TbMA

Кстати, а можно прокомментировать следующее?
Перевод: Дополнительные шаги были предприняты в Марте.
Первое - ВМС временно ограничила скоростные полеты Ф-14 на низкой высоте. Как результат новой информации, полученной из обломков F-14D упавшего у побережья Южной Калифорнии, использование афртербернера тепрь запрещено для F-14B, F-14D на всех высотах, кроме как в исключительных случаях.
Ну и дальше вода.
Вопрос: Когда ограничения были сняты?
В добавление, цитата ихнего пилота:
Перевод: Это было вызвано прогоранием ?дожигателя?, неумолимо следующим за горизонтальным ?пролетом?. Прогорание пережигало гидравлические тяги, и практически всегда случалось в этом режиме: низкого скоростного полета. Нехорошо: (мы) потеряли так множество пилотов ВМС. Но двигателем, имунным к этому режиму был новый GE F-110
T.e. до 1996 (?) F-14 всегда гробился в этом режиме?
STATEMENT OF ADMIRAL JAY L. JOHNSON VICE CHIEF OF NAVAL OPERATIONS
THE F-14 PROGRAM: PRESENT AND FUTURE BEFORE THE PROCUREMENT SUBCOMMITTEE OF THE HOUSE NATIONAL SECURITY COMMITTEE ON 16 APRIL 1996
para 4:
Additional steps were taken during the month of March.
First, the Navy placed interim restrictions on the F-14 in the
low altitude, high speed environment. As a result of new
information gained from the salvage of the F-14D off the coast of
southern California, afterburner use is now prohibited for F-14Bs
and F-14D s at all altitudes except for operational
emergencies. We will reassess these restrictions when the full
results of our investigation on the last three F-14 mishaps are
known. These restrictions reduce F-14 aircraft operations in a
regime where there is little margin for error; but they will not
degrade F-14 training and readiness in the near term. The CNO
also asked the fleet commanders to review procedures and ensure
that safety is given top priority. Additionally, we have
directed that operational risk management be a key factor in the
planning and execution of all aviation training and operations.
Перевод: Дополнительные шаги были предприняты в Марте.
Первое - ВМС временно ограничила скоростные полеты Ф-14 на низкой высоте. Как результат новой информации, полученной из обломков F-14D упавшего у побережья Южной Калифорнии, использование афртербернера тепрь запрещено для F-14B, F-14D на всех высотах, кроме как в исключительных случаях.
Ну и дальше вода.
Вопрос: Когда ограничения были сняты?
В добавление, цитата ихнего пилота:
It was caused by burner burn-though, inevitably right next to the horizontal stab. That, in turn, cut hydraulic lines, and it almost always happened in that regime: low and fast. Not good; lost many naval aviators that way. But the engine that was prone to that were the new GE F-110s.
Перевод: Это было вызвано прогоранием ?дожигателя?, неумолимо следующим за горизонтальным ?пролетом?. Прогорание пережигало гидравлические тяги, и практически всегда случалось в этом режиме: низкого скоростного полета. Нехорошо: (мы) потеряли так множество пилотов ВМС. Но двигателем, имунным к этому режиму был новый GE F-110
T.e. до 1996 (?) F-14 всегда гробился в этом режиме?
Это сообщение редактировалось 10.12.2005 в 00:38
А как далеко APG-71/AWG-9 с ЗПС цели видят на фоне земли в ИД-режиме?
Есть хоть где-нибудь данные об этом или нет?
Есть хоть где-нибудь данные об этом или нет?
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.
YYKK> Ну не стоит так принижатся.
YYKK> Уже есть достаточно давно БРЛС совсем с иными свойствами.
YYKK> Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс. [»]
А можно хоть намёком? Интересно, особенно если это "достаточно давно"
YYKK> Уже есть достаточно давно БРЛС совсем с иными свойствами.
YYKK> Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс. [»]
А можно хоть намёком? Интересно, особенно если это "достаточно давно"
sabakka> А как далеко APG-71/AWG-9 с ЗПС цели видят на фоне земли в ИД-режиме?
sabakka> Есть хоть где-нибудь данные об этом или нет?
- Но вот тут же говорится:The AWG-9 is able to remove the surface clutter of the Earth's surface, providing the radar with a look-down, shoot-down capability against low flying aircraft. This feature also proves useful in the detection and interception of sea-skimming anti-ship missiles. The AWG-9 is capable of detecting targets as low as 50 feet and as high as 80,000 feet at ranges exceeding 130 miles [209км]. Если цель идёт на высоте 50 футов [15м], то естественно, что режим работы импульсно-доплеровский. Дальше, в табличке, это ещё раз оговаривается:
PDS of 5 sq. m target - 132 mi (213 km)
Кстати, выпущенный примерно в эти же годы АВАКС мог проводить наземный/надводный транспорт, чья радиальная составляющая "на/от" (по памяти) не была менее 15 км/час (~5 м/сек). Логично предположить, что в БРЛС F-14 использовалась техника того же уровня. При таких параметрах уже практически не существенно, цель догоняем или летим ей навстречу... Поэтому у западных БРЛС нет разницы и в ТТХ в дальностях обнаружения в ППС и ЗПС в 4 раза, что радиальная составляющая 5 м/с у АВАКСа и 41-58 м/с радиальные составляющие скорости цели у Су-27 - две очень большие разницы...
sabakka> Есть хоть где-нибудь данные об этом или нет?
- Но вот тут же говорится:The AWG-9 is able to remove the surface clutter of the Earth's surface, providing the radar with a look-down, shoot-down capability against low flying aircraft. This feature also proves useful in the detection and interception of sea-skimming anti-ship missiles. The AWG-9 is capable of detecting targets as low as 50 feet and as high as 80,000 feet at ranges exceeding 130 miles [209км]. Если цель идёт на высоте 50 футов [15м], то естественно, что режим работы импульсно-доплеровский. Дальше, в табличке, это ещё раз оговаривается:
PDS of 5 sq. m target - 132 mi (213 km)
Кстати, выпущенный примерно в эти же годы АВАКС мог проводить наземный/надводный транспорт, чья радиальная составляющая "на/от" (по памяти) не была менее 15 км/час (~5 м/сек). Логично предположить, что в БРЛС F-14 использовалась техника того же уровня. При таких параметрах уже практически не существенно, цель догоняем или летим ей навстречу...
Поэтому у западных БРЛС нет разницы и в ТТХ в дальностях обнаружения в ППС и ЗПС в 4 раза, что радиальная составляющая 5 м/с у АВАКСа и 41-58 м/с радиальные составляющие скорости цели у Су-27 - две очень большие разницы...
“The only good Indian is a dead Indian”
YYKK>> Ну не стоит так принижатся.
YYKK>> Уже есть достаточно давно БРЛС совсем с иными свойствами.
YYKK>> Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс.
Dio69> А можно хоть намёком? Интересно, особенно если это "достаточно давно"
- Радужное настоящее и светлое будущее:
YYKK>> Уже есть достаточно давно БРЛС совсем с иными свойствами.
YYKK>> Без привязки к конкретной, дальность обнаружения зависшего вертолета - 40 км (цель типа истребитель ~180 км), и это совсем не Барс.
Dio69> А можно хоть намёком? Интересно, особенно если это "достаточно давно"
- Радужное настоящее и светлое будущее:
Zaslon / S-800 / RP-31 / N007
NATO "Flash Dance"
OKB: Tikhomirov NIIP
Designer: Alfred Fedotchenko
Zaslon antenna shown at MAKS airshow
The N007 Zaslon was the first phased-array radar to enter service on a fighter aircraft. In 1968, Phazotron had been tasked with developing the radar for the future MiG-31. Engineers prepared two prototype units, dubbed Groza and Vikhr, both based on Sapfir-series technology. The final version was called Smerch-100, but the radar failed to meet requirements. As a result, in 1971 Phazotron was ordered to pass all the documentation to its consortium partner NIIP. The result was the Zaslon radar. The task was very difficult, since one of the main requirements was engaging cruise missiles, and the experienced Phazotron had failed to solve the problem of detecting small objects against ground clutter and tracking multiple targets simultaneously. Finally all the problems were solved, with lots of assistance from NPO Istok, who helped design the phased array, and Leninetz who were to build it, and the system finally reached service in December 1981. Zaslon is double the weight of the AWG-9, the largest US fighter radar. The NIIP team believed that the advantages a phased-array radar gave in terms of near-instantaneous scanning and multitarget engagement capability (a typical mechanically-scanned antenna can take 12-14 seconds to complete a scan) were worth the weight and cost penalties. First tests of the radar were conducted in 1973, and it was first flown on a test aircraft in 1976. On February 15, 1978, a mission in which ten targets were detected and tracked was performed for the first time. In 1981, MiG-31 aircraft carrying the Zaslon radar entered service with the Air Defense aviation, and became fully operational in 1983.
The 1.1m diameter phased array antenna weighs 300kg, the whole radar weighing in at 1000kg. Zaslon uses an Argon-15A computer (first airborne digital computer designed in USSR). Zaslon operates in 9-9.5 GHz band. It detects and engages targets down to 25m, including cruise missiles. Maximum possible search range is 300km for a large airborne target.
Range, headon, versus bomber: 180-200km search, 120-150km track
Range, tailchase, versus bomber: 90km search, 70km track
Range, headon, versus fighter : 120km search, 90km track
Zaslon can detect targets as small as 0.3 sq. m radar cross-section (RCS) to a maximum range of 65 km
Radar scan limits are ±70 azimuth, +70/-60 elevation.
Target track TWS mode, track 10 and engage 4.
Average power transmitted is 2.5kW.
MTBF is only 55 hours.
Zaslon-A security of the Zaslon system was compromised by the US spy A Tolkachov. This lead to development of an updated version, fitted to MiG-31B from 1990, retrofitted to some earlier models during rebuilding to MiG-31BS standard. It had a new data processor, giving extended capabilities, longer range and better ECM resistance.
Zaslon-M 1.4m diameter antenna, 50% to 100% better performance than Zaslon. In April 1994 used with an R-37 to hit a target at 300km distance. Search range 400km versus a 20 sq m RCS target. Tracks 24 targets at once, engages 6. Supposedly able to engage launched Pershing-2 missiles in flight with long-range R-37 active radar-guided missiles. Project ended as no new MiG-31s will be built.
Zaslon-AM all MiG-31s remaining in service are supposed to have their radars upgraded to Zaslon-AM status by Leninets, according to a design put forward by NIIP that keeps the existing antenna while replacing the old Argon-15A processors with Baget series processors.
Zhuk / N010
OKB: Phazotron NIIR
Chief Designer: Yuri Guskov
Zhuk (Phazotron website)
The original Zhuk radar was designed by in the mid eighties for the MiG-29M, an update of the MiG-29 intended to rectify the shortcomings of the original MiG-29. Tested from 1987 on a special MiG-29 (9-16) testbed machine, and drawing on the NPO Istok Soyuz program, the Zhuk was intended to be the first truly multimode radar developed in the former Soviet Union, with a full range of air-air and air-ground modes enabling the host aircraft to perform a wide range of tasks. It used improved TS101 series processors and a slotted antenna. Political changes in the early nineties meant that the MiG-29M was first postponed and then cancelled. The Russian air force was not especially impressed with the original Zhuk radar, as it did not significantly increase the air-to-air detection and tracking range, preventing exploitation of the full capabilities of the extended range R-27 and R-77 missiles. It is also thought that the prototype Zhuk did not have the air-to-surface modes fully implemented.
Phazotron have since developed a whole family of radars based on the Zhuk, tailored to installation on different aircraft, and with varying levels of capability. The Kopyo is based largely on Zhuk technology, repackaged for installation into light fighters such as the MiG-21. Zhuk is a large radar for its performance class, as might be expected from the crude and bulky electronics of the former Soviet Union at the time it was designed.
Depending on range, the radar has +20, +60, or even +90 degrees of detection/track angle in azimuth and two or four bars in elevation (+60/-40 degrees maximum). 680mm diameter antenna. The radar could cooperate with the new R-77 (AA-12) missiles with active radar seekers. Two missiles could be launched against two separate targets at the same time, and two others shortly afterwards. The radar works in X band. Zhuk has 5 kW peak power and 1 kW average power.
Weight: 250kg
Air to air modes:
Velocity search
RWS (Range-While-Search) mode
Lookup: 80-85km range
lookdown head-on: 80-85km range
lookdown tailchase: 40-50km range
TWS (Track-While-Scan) mode
tracks simultaneously 10 to 12 targets, automatically selects the most dangerous 2 to 4 of them, engaging out to 60km
STT (Single Target Tracking)
Raid assessment
Close combat modes
Wide angle
Vertical scan
HUD view
Boresight
Slewable
Recognition of target types and quality
Detection and engagement of hovering helicopters
Air to surface modes:
Real beam mapping
DBS (Doppler Beam Sharpening) mapping
SAR (Synthetic Aperture Radar) ground mapping
Multiple target tracking
Map freeze and zoom
Sea surface surveillance: Range 120-150km vs a large ship.
Ground Moving Target Indication
Ground ranging
Ground speed measurement
Beacon interrogation
Terrain avoidance
Employment of unguided munitions on receipt of radar information ('blind' bombing").
Following the breakup of the Soviet Union, Phazotron developed a series of radars based on the Zhuk. The splitting of Phazotron and NIIP, the latter responsible for the N011 designed for the Su-27M, resulted in rival studies for Zhuk derivatives to fit on advanced Sukhoi Su-27 variants. Also, the Kopyo radar was designed, based on Zhuk technology, specifically for the purpose of upgrading older aircraft such as the MiG-21.
Zhuk-8II
This version was designed to fit the Chinese F-8II interceptor, after the intended AN/APG-66 radars became unavailable due to US sanctions. It has slightly downgraded capabilities: maximum range is 90 km against a bomber and 70 km against a fighter; it can detect ten targets, track two of them, and fire a missile at a single target. The maximum field of view was reduced to +85 degrees in azimuth and in elevation to +55/-40 degrees. Weight is 240kg. It turns the somewhat obsolescent F-8II into a more useful aircraft, with multimode capabilities. This radar may be in service in China.
Zhuk-27 (Phazotron website)
Zhuk-27 represents a simple repackaging of the basic Zhuk design for the Su-27 airframe. It certainly sports a larger antenna than the standard model, perhaps with greater transmitter power too. Scan limits are slightly reduced, to ±85° in azimuth, and weight increased to 275kg. The changes increase detection range of a fighter target to 130km, tracking range to 90km.
Zhuk-PH was a more radical upgrading of the basic Zhuk design for Su-27 size aircraft. It added a new phased-array antenna, and also featured a high PRF velocity search mode for maximum detection range, without range information. Search range was predicted to be 165km and 140km against a 3 sq m RCS target in velocity search mode and range-while-search respectively. The phased-array antenna took the weight to 275-300kg, while scan limits were ±70° in azimuth and elevation. 24 targets could be tracked at once, and 6 to 8 engaged simultaneously.
Evolved into Sokol (Zhuk-MSF) radar.
Zhuk-M mounted on a MiG-29
Zhuk-M features a greater air and sea target detection range, enhanced resolution against ground in synthetic aperture radar mode, as well as an advanced "Bagiet" series computer. Compared to the N019 radar installed on the majority of MiG-29s, Phazotron achieved greater target detection range, observation angles in azimuth close to 90 degrees, greater number of targets that can be detected and attacked, air-to-surface capability, use of the R-27ER1 and RVV-AE missiles, as well as targeting of the Kh-31A and Kh-35 missiles.
Look-up range is 130km head-on, 50km tail-on versus fighter target.
Look-down range is 120km head-on, 40km tail-on versus fighter target.
TWS mode tracks 10-20 targets and engages 2-4.
Weight: 220kg.
Volume: 400dm3.
Antenna: 624mm diameter, 34.5dB gain.
Peak power output: 6kW.
Average power output: 1.5kW.
Power required: 12 kVA AC, 1.5 kVA DC.
MTBF: 200h.
Zhemchoug (Phazotron website)
Zhemchoug was developed by Phazotron in cooperation with China for J-10 and FC-1 projects, its a version of the Zhuk-M with Chinese IFF and other changes. Substantially lighter than Zhuk at just 180kg, with equal or better capabilities. Its planar array antenna helps keep down costs and weight compared to phased array designs. It detects simultaneously 20 targets, selects the most dangerous 4 of them, tracks and attacks them. Proposed for MiG-29 upgrades.
Detection range: 80 km, lock-on range 60 km.
RP-35 is a Zhuk-M or Zhemchoug with a 680mm phased-array antenna, sized for the MiG-35 project. Current status uncertain.
Zhuk-MS
Zhuk-MS is an Su-27 sized version of Zhuk-M. Peak power is increased to 6 kW and average power to 1.5 kW. The antenna diameter is enlarged to 960 mm. The maximum range is increased to 140 km (50 km in tailchase). The radar can detect up to 20 targets simultaneously and can track and engage up to four targets with R-77 missiles. It introduced synthetic-aperture-radar (SAR) modes (3 m resolution) and terrain-following modes in the air-to-ground role.
Zhuk-MS entered production for China. 20 prototype sets are thought to be under test on Chinese Su-30MKK, though the continued use of N001VE in later batches implies that problems were encountered.
Zhuk-MSF / Sokol
OKB: Phazotron NIIR
Zhuk-MSF non-equidistant phased antenna
Zhuk-MSF is the most up to date radar design by Phazotron. Sokol uses a non-equidistant rather than the traditional linear radar field distribution, which, Phazotron says, allows a fivefold radar cost reduction over a traditionally designed phased array radar. The production radar will have a 980mm antenna diameter (37dB gain) and weigh 275kg. The radar tracks 24-30 targets, engages the most dangerous 6 to 8 of them. Its electronic beam steering will give ±70 deg spatial coverage in both axes. Power output is 8kW peak, 2 - 3kW average. It is designed for high reliability, and is frequency agile with LPI and anti ECM features. Phazotron says it will be capable of interleaving between air-to-air and air-to-ground modes.
Velocity search: 245km head-on vs fighter target. (This figure is no longer quoted. The mode may have been removed)
Range-while-search, lookup mode: 180-190km head-on / 80km tail-on vs fighter target.
Range-while-search, lookdown mode : 170km head-on / 60km tail-on vs fighter target.
Track-while-scan mode: 150km head-on vs fighter target.
Against a large target such as a bomber or AWACS aircraft detection range comfortably exceeds 300km
.
NATO "Flash Dance"
OKB: Tikhomirov NIIP
Designer: Alfred Fedotchenko
Zaslon antenna shown at MAKS airshow
The N007 Zaslon was the first phased-array radar to enter service on a fighter aircraft. In 1968, Phazotron had been tasked with developing the radar for the future MiG-31. Engineers prepared two prototype units, dubbed Groza and Vikhr, both based on Sapfir-series technology. The final version was called Smerch-100, but the radar failed to meet requirements. As a result, in 1971 Phazotron was ordered to pass all the documentation to its consortium partner NIIP. The result was the Zaslon radar. The task was very difficult, since one of the main requirements was engaging cruise missiles, and the experienced Phazotron had failed to solve the problem of detecting small objects against ground clutter and tracking multiple targets simultaneously. Finally all the problems were solved, with lots of assistance from NPO Istok, who helped design the phased array, and Leninetz who were to build it, and the system finally reached service in December 1981. Zaslon is double the weight of the AWG-9, the largest US fighter radar. The NIIP team believed that the advantages a phased-array radar gave in terms of near-instantaneous scanning and multitarget engagement capability (a typical mechanically-scanned antenna can take 12-14 seconds to complete a scan) were worth the weight and cost penalties. First tests of the radar were conducted in 1973, and it was first flown on a test aircraft in 1976. On February 15, 1978, a mission in which ten targets were detected and tracked was performed for the first time. In 1981, MiG-31 aircraft carrying the Zaslon radar entered service with the Air Defense aviation, and became fully operational in 1983.
The 1.1m diameter phased array antenna weighs 300kg, the whole radar weighing in at 1000kg. Zaslon uses an Argon-15A computer (first airborne digital computer designed in USSR). Zaslon operates in 9-9.5 GHz band. It detects and engages targets down to 25m, including cruise missiles. Maximum possible search range is 300km for a large airborne target.
Range, headon, versus bomber: 180-200km search, 120-150km track
Range, tailchase, versus bomber: 90km search, 70km track
Range, headon, versus fighter : 120km search, 90km track
Zaslon can detect targets as small as 0.3 sq. m radar cross-section (RCS) to a maximum range of 65 km
Radar scan limits are ±70 azimuth, +70/-60 elevation.
Target track TWS mode, track 10 and engage 4.
Average power transmitted is 2.5kW.
MTBF is only 55 hours.
Zaslon-A security of the Zaslon system was compromised by the US spy A Tolkachov. This lead to development of an updated version, fitted to MiG-31B from 1990, retrofitted to some earlier models during rebuilding to MiG-31BS standard. It had a new data processor, giving extended capabilities, longer range and better ECM resistance.
Zaslon-M 1.4m diameter antenna, 50% to 100% better performance than Zaslon. In April 1994 used with an R-37 to hit a target at 300km distance. Search range 400km versus a 20 sq m RCS target. Tracks 24 targets at once, engages 6. Supposedly able to engage launched Pershing-2 missiles in flight with long-range R-37 active radar-guided missiles. Project ended as no new MiG-31s will be built.
Zaslon-AM all MiG-31s remaining in service are supposed to have their radars upgraded to Zaslon-AM status by Leninets, according to a design put forward by NIIP that keeps the existing antenna while replacing the old Argon-15A processors with Baget series processors.
Zhuk / N010
OKB: Phazotron NIIR
Chief Designer: Yuri Guskov
Zhuk (Phazotron website)
The original Zhuk radar was designed by in the mid eighties for the MiG-29M, an update of the MiG-29 intended to rectify the shortcomings of the original MiG-29. Tested from 1987 on a special MiG-29 (9-16) testbed machine, and drawing on the NPO Istok Soyuz program, the Zhuk was intended to be the first truly multimode radar developed in the former Soviet Union, with a full range of air-air and air-ground modes enabling the host aircraft to perform a wide range of tasks. It used improved TS101 series processors and a slotted antenna. Political changes in the early nineties meant that the MiG-29M was first postponed and then cancelled. The Russian air force was not especially impressed with the original Zhuk radar, as it did not significantly increase the air-to-air detection and tracking range, preventing exploitation of the full capabilities of the extended range R-27 and R-77 missiles. It is also thought that the prototype Zhuk did not have the air-to-surface modes fully implemented.
Phazotron have since developed a whole family of radars based on the Zhuk, tailored to installation on different aircraft, and with varying levels of capability. The Kopyo is based largely on Zhuk technology, repackaged for installation into light fighters such as the MiG-21. Zhuk is a large radar for its performance class, as might be expected from the crude and bulky electronics of the former Soviet Union at the time it was designed.
Depending on range, the radar has +20, +60, or even +90 degrees of detection/track angle in azimuth and two or four bars in elevation (+60/-40 degrees maximum). 680mm diameter antenna. The radar could cooperate with the new R-77 (AA-12) missiles with active radar seekers. Two missiles could be launched against two separate targets at the same time, and two others shortly afterwards. The radar works in X band. Zhuk has 5 kW peak power and 1 kW average power.
Weight: 250kg
Air to air modes:
Velocity search
RWS (Range-While-Search) mode
Lookup: 80-85km range
lookdown head-on: 80-85km range
lookdown tailchase: 40-50km range
TWS (Track-While-Scan) mode
tracks simultaneously 10 to 12 targets, automatically selects the most dangerous 2 to 4 of them, engaging out to 60km
STT (Single Target Tracking)
Raid assessment
Close combat modes
Wide angle
Vertical scan
HUD view
Boresight
Slewable
Recognition of target types and quality
Detection and engagement of hovering helicopters
Air to surface modes:
Real beam mapping
DBS (Doppler Beam Sharpening) mapping
SAR (Synthetic Aperture Radar) ground mapping
Multiple target tracking
Map freeze and zoom
Sea surface surveillance: Range 120-150km vs a large ship.
Ground Moving Target Indication
Ground ranging
Ground speed measurement
Beacon interrogation
Terrain avoidance
Employment of unguided munitions on receipt of radar information ('blind' bombing").
Following the breakup of the Soviet Union, Phazotron developed a series of radars based on the Zhuk. The splitting of Phazotron and NIIP, the latter responsible for the N011 designed for the Su-27M, resulted in rival studies for Zhuk derivatives to fit on advanced Sukhoi Su-27 variants. Also, the Kopyo radar was designed, based on Zhuk technology, specifically for the purpose of upgrading older aircraft such as the MiG-21.
Zhuk-8II
This version was designed to fit the Chinese F-8II interceptor, after the intended AN/APG-66 radars became unavailable due to US sanctions. It has slightly downgraded capabilities: maximum range is 90 km against a bomber and 70 km against a fighter; it can detect ten targets, track two of them, and fire a missile at a single target. The maximum field of view was reduced to +85 degrees in azimuth and in elevation to +55/-40 degrees. Weight is 240kg. It turns the somewhat obsolescent F-8II into a more useful aircraft, with multimode capabilities. This radar may be in service in China.
Zhuk-27 (Phazotron website)
Zhuk-27 represents a simple repackaging of the basic Zhuk design for the Su-27 airframe. It certainly sports a larger antenna than the standard model, perhaps with greater transmitter power too. Scan limits are slightly reduced, to ±85° in azimuth, and weight increased to 275kg. The changes increase detection range of a fighter target to 130km, tracking range to 90km.
Zhuk-PH was a more radical upgrading of the basic Zhuk design for Su-27 size aircraft. It added a new phased-array antenna, and also featured a high PRF velocity search mode for maximum detection range, without range information. Search range was predicted to be 165km and 140km against a 3 sq m RCS target in velocity search mode and range-while-search respectively. The phased-array antenna took the weight to 275-300kg, while scan limits were ±70° in azimuth and elevation. 24 targets could be tracked at once, and 6 to 8 engaged simultaneously.
Evolved into Sokol (Zhuk-MSF) radar.
Zhuk-M mounted on a MiG-29
Zhuk-M features a greater air and sea target detection range, enhanced resolution against ground in synthetic aperture radar mode, as well as an advanced "Bagiet" series computer. Compared to the N019 radar installed on the majority of MiG-29s, Phazotron achieved greater target detection range, observation angles in azimuth close to 90 degrees, greater number of targets that can be detected and attacked, air-to-surface capability, use of the R-27ER1 and RVV-AE missiles, as well as targeting of the Kh-31A and Kh-35 missiles.
Look-up range is 130km head-on, 50km tail-on versus fighter target.
Look-down range is 120km head-on, 40km tail-on versus fighter target.
TWS mode tracks 10-20 targets and engages 2-4.
Weight: 220kg.
Volume: 400dm3.
Antenna: 624mm diameter, 34.5dB gain.
Peak power output: 6kW.
Average power output: 1.5kW.
Power required: 12 kVA AC, 1.5 kVA DC.
MTBF: 200h.
Zhemchoug (Phazotron website)
Zhemchoug was developed by Phazotron in cooperation with China for J-10 and FC-1 projects, its a version of the Zhuk-M with Chinese IFF and other changes. Substantially lighter than Zhuk at just 180kg, with equal or better capabilities. Its planar array antenna helps keep down costs and weight compared to phased array designs. It detects simultaneously 20 targets, selects the most dangerous 4 of them, tracks and attacks them. Proposed for MiG-29 upgrades.
Detection range: 80 km, lock-on range 60 km.
RP-35 is a Zhuk-M or Zhemchoug with a 680mm phased-array antenna, sized for the MiG-35 project. Current status uncertain.
Zhuk-MS
Zhuk-MS is an Su-27 sized version of Zhuk-M. Peak power is increased to 6 kW and average power to 1.5 kW. The antenna diameter is enlarged to 960 mm. The maximum range is increased to 140 km (50 km in tailchase). The radar can detect up to 20 targets simultaneously and can track and engage up to four targets with R-77 missiles. It introduced synthetic-aperture-radar (SAR) modes (3 m resolution) and terrain-following modes in the air-to-ground role.
Zhuk-MS entered production for China. 20 prototype sets are thought to be under test on Chinese Su-30MKK, though the continued use of N001VE in later batches implies that problems were encountered.
Zhuk-MSF / Sokol
OKB: Phazotron NIIR
Zhuk-MSF non-equidistant phased antenna
Zhuk-MSF is the most up to date radar design by Phazotron. Sokol uses a non-equidistant rather than the traditional linear radar field distribution, which, Phazotron says, allows a fivefold radar cost reduction over a traditionally designed phased array radar. The production radar will have a 980mm antenna diameter (37dB gain) and weigh 275kg. The radar tracks 24-30 targets, engages the most dangerous 6 to 8 of them. Its electronic beam steering will give ±70 deg spatial coverage in both axes. Power output is 8kW peak, 2 - 3kW average. It is designed for high reliability, and is frequency agile with LPI and anti ECM features. Phazotron says it will be capable of interleaving between air-to-air and air-to-ground modes.
Velocity search: 245km head-on vs fighter target. (This figure is no longer quoted. The mode may have been removed)
Range-while-search, lookup mode: 180-190km head-on / 80km tail-on vs fighter target.
Range-while-search, lookdown mode : 170km head-on / 60km tail-on vs fighter target.
Track-while-scan mode: 150km head-on vs fighter target.
Against a large target such as a bomber or AWACS aircraft detection range comfortably exceeds 300km
“The only good Indian is a dead Indian”
YYKK>> Действительно
Вуду> - Вообще-то страничка более чем удручающая, для БРЛС самолёта выпуска 1991 года... Страшная страничка-то.
Вуду> Дальность обнаружения в заднюю полусферу 25-30 км (как минимум с ЭПР=5 кв м) - это полный неописуемый звиздец...
Вуду> И мне ещё говорят, что я - очернитель советской авионики...
Вуду> Сухой Су-27СК
Вуду> В сопоставлении с БРЛС F-14, старше на 20 лет:
Вуду> Grumman F-14A Tomcat
Вуду> http://www.jolly-rogers.com/airpower/f-14/f-14-av.htm [»]
Увы, но это обычное дело. Мы никогда не были равны Америке. Мы всё время её догоняли. Мы были бедной страной. И что бы там ни говорили, именно при злобном Сталине сделали огромный рывок вперёд. Из нищеты и дикости. А вот в 70-е начался тормоз. Вот только с 1991 года и догонять перестали. А они как бежали, так и бегут...
В том что мы постоянно что-то слизывали не вижу ничего плохого - это закономерный процесс развития. И самолёты и автомобили и компьютеры родом с Запада.
Когда американский инженер получает ... тыс. долл в месяц, ездит летом на Гавайи, может получить дешёвые кредиты, и при этом с другой стороны его постоянно пресингует начальство на предмет качества и темпов работы - это даёт свои плоды...
Когда в наших НИИПе и Фазотроне осталось несколько пенсионеров, еле шаркающих ногами по пустынным корридорам институтов, то...
Ну о какой хотя бы гонке может идти речь? Если уйдя в любой банк, любую нормальную комерческую контору, молодой специалист (а ему надо лет 10-15 повариться в этом соку, что бы стать локаторщиком) получает в несколько раз больше, то только дурак там останется...
Пример месячной давности - приехал один молодой кандидат наук из глубинки в Москву. Очень толковый малый, в вопросы зубами вгрызается, аж ошмётки летят. Думал предложить ему темку по двигателям АЛ-31Ф. Всё там почти готово, нужен как у Высоцкого "настоящий буйный", что б вихри генерил...
Так ему в химической японской компании после собеседования и пары дней работы назначили с ходу зарплату 48000 рублей и соцпакет. Перспективы. Ну он что дурак что ли какими-то самолётами заниматься?
Вымывание кадров - это просто абзац какой-то...
Вуду> - Вообще-то страничка более чем удручающая, для БРЛС самолёта выпуска 1991 года... Страшная страничка-то.
Вуду> Дальность обнаружения в заднюю полусферу 25-30 км (как минимум с ЭПР=5 кв м) - это полный неописуемый звиздец...
Вуду> И мне ещё говорят, что я - очернитель советской авионики...
Вуду> Сухой Су-27СК
Вуду> В сопоставлении с БРЛС F-14, старше на 20 лет:
Вуду> Grumman F-14A Tomcat
Вуду> http://www.jolly-rogers.com/airpower/f-14/f-14-av.htm [»]
Увы, но это обычное дело. Мы никогда не были равны Америке. Мы всё время её догоняли. Мы были бедной страной. И что бы там ни говорили, именно при злобном Сталине сделали огромный рывок вперёд. Из нищеты и дикости. А вот в 70-е начался тормоз. Вот только с 1991 года и догонять перестали. А они как бежали, так и бегут...
В том что мы постоянно что-то слизывали не вижу ничего плохого - это закономерный процесс развития. И самолёты и автомобили и компьютеры родом с Запада.
Когда американский инженер получает ... тыс. долл в месяц, ездит летом на Гавайи, может получить дешёвые кредиты, и при этом с другой стороны его постоянно пресингует начальство на предмет качества и темпов работы - это даёт свои плоды...
Когда в наших НИИПе и Фазотроне осталось несколько пенсионеров, еле шаркающих ногами по пустынным корридорам институтов, то...
Ну о какой хотя бы гонке может идти речь? Если уйдя в любой банк, любую нормальную комерческую контору, молодой специалист (а ему надо лет 10-15 повариться в этом соку, что бы стать локаторщиком) получает в несколько раз больше, то только дурак там останется...
Пример месячной давности - приехал один молодой кандидат наук из глубинки в Москву. Очень толковый малый, в вопросы зубами вгрызается, аж ошмётки летят. Думал предложить ему темку по двигателям АЛ-31Ф. Всё там почти готово, нужен как у Высоцкого "настоящий буйный", что б вихри генерил...
Так ему в химической японской компании после собеседования и пары дней работы назначили с ходу зарплату 48000 рублей и соцпакет. Перспективы. Ну он что дурак что ли какими-то самолётами заниматься?
Вымывание кадров - это просто абзац какой-то...
При таких параметрах уже практически не существенно, цель догоняем или летим ей навстречу... Поэтому у западных БРЛС нет разницы и в ТТХ в дальностях обнаружения в ППС и ЗПС в 4 раза, что радиальная составляющая 5 м/с у АВАКСа и 41-58 м/с радиальные составляющие скорости цели у Су-27 - две очень большие разницы...
Типа, если не даны раздельно, значит одинаковы. Действительно, не встречал в западных источниках отдельно приведённых дальностей для западных РЛС. Встречал в наших:
Полностью цифровой БРЛС импульсно-доплеровского типа являлась станция прицельной системы APG-63 самолета F-15. Основные особенности функционирования БРЛС APG-63:
использование режима КНИ ВЧП, обеспечивающего в зоне ±30° по азимуту и 10° по углу места обнаружение цели с ЭПР Sц = 3 м2 на встречных курсах на фоне земли при дальности 80...100 км;
реализация режима КНИ средней частоты повторения со сжатием импульсов на базе фазокодовой модуляции, обеспечивающего обнаружение цели с ЭПР Sц = 3 м2 на встречных и догонных курсах на фоне земли при дальности 40....50 км;организация сопровождения "на проходе" до 10 целей при сканировании антенны, захват одной из целей и ее сопровождение с непрерывным подсветом для наведения ракет с полуактивными радиолокационными ГСH;
введена двухстрочная зона обзора с вертикальным сканированием луча в пределах -5...+45° вдоль продольной оси самолета для захвата цели посредством накренения самолета в ближнем маневренном бою с последующим переходом в режим непрерывной пеленгации цели при угловой скорости линии визирования до 20 град/с.
Поэтому у западных БРЛС нет разницы и в ТТХ в дальностях обнаружения в ППС и ЗПС в 4 раза
Ну, в 2 раза будет..
При таких параметрах уже практически не существенно, цель догоняем или летим ей навстречу
Если используется средние ЧПИ, то без разницы, но если высокие, то дальность в ППС в 2-3 раза больше, чем дальность в ППС при средних, в дальность в ЗПС меньше в десятки раз, так как многократно усилившаяся интенсивность помех от земли (из-за ВЧП), имеющих диапазон ДЧ, перекрывающий допп. частоту полезного сигнала по БЛ просто давит полезный сигнал.
Вот например, APG-66/68 у F-16 использует только средние ЧПИ, поэтому дальность в ППС и ЗПС одинакова, но если б он использовал как Н-019 Мига-29 ещё и высокие ЧПИ, то мог бы увеличить дальность обнаружения в ППС.
APG-71 и AWG-9 используют только ВЧП, так что в их способности видеть цели в ЗПС на фоне земли я сомневаюсь. Кто-то помню отвечал мне, что иранца подтверждали это, надо найти узнать, где об этом прочитать.
стати, выпущенный примерно в эти же годы АВАКС мог проводить наземный/надводный транспорт, чья радиальная составляющая "на/от" (по памяти) не была менее 15 км/час (~5 м/сек).
Но тут РЛС Авакса и перехватчика. Пусть даже в одно время и с ипользованием одних и тех же достижений этого времени. Это РЛС совершенно разных классов, частотных диапазонов и.т.д.
Что за АВАКС, не E-2, случайно? Хотелось бы узнать об этом побольше.
РЛС E-2 ИД-режимов тогда не имела, только импульсный режим с компсационной схемой СДЦ. Видимо она и обеспечивала режекцию ДЧ в пределах ±15 км/ч от нулевой ДЧ, а также от всех ДЧ=(ЧПИ/2*длину_волны)/2*n (где n=1,2....).
А много ли движующегося дерьма с Vрад>15км/ч он ещё не отфильтрует: волны на пов-ти моря (ограничение на погодные условия на море есть), колышущиеся деревья, множество едущих автомашин, причём пятнышко от каждой на экране будет не пропорциональным соотношению размера машины и дальности РЛС, а гораздо больше (определяться разрешением по дальности и азимуту), плывущие по небу облака.
Даже здесь по-любому шум в области ДЧ скоростей сближения будет выше, так как носитель РЛС движется.
Понимаете, одно дело толпа операторов за экранами РЛС Авакса:они видят множество отметок, каждую ведут, определяют по харатеру движения её тип, другое - один оператор за экраном РЛС перехватчика: ему нужно быстрое и чёткое выделение целей, чтоб сразу быть готовым к перехвату, значит нужен более высокий порог фильтрации по скорости, а чтоб фильтровать, нужно эту скорость знать одназначно значит используем высокие ЧПИ, при которых в ЗПС нихрена не видно. К тому же длина волны у AWG-9 гораздо меньше длины волны у РЛС E-2, значит для той же скорости цели, которую нам надо одн. определить ВЧП будут больше (если б у РЛС E-2 был бы режим с ВЧП), а чем больше ЧПИ, тем выше будет уровень помех по БЛ на догонных доппл. скоростях.
Воздух выдержит только тех,
Только тех, кто верит в себя,
Ветер дует туда, куда
Прикажет тот, кто верит в себя.
Вуду> Поэтому у западных БРЛС нет разницы и в ТТХ в дальностях обнаружения в ППС и ЗПС в 4 раза
sabakka> Ну, в 2 раза будет..
- Нигде, никогда, ни в одном военном справочнике 80-х и 90-х годов не встречал этого различия. Видимо - и в 2 раза не будет...
sabakka> APG-71 и AWG-9 используют только ВЧП, так что в их способности видеть цели в ЗПС на фоне земли я сомневаюсь. Кто-то помню отвечал мне, что иранца подтверждали это, надо найти узнать, где об этом прочитать.
- Странные сомнения... Если бы этот факт имел место, он в обязательном порядке был бы оговорен во всех советских учебниках по тактике ВВС, в боевых уставах и пр. - поскольку давал бы безусловные тактические преимущества!
Вуду> кстати, выпущенный примерно в эти же годы АВАКС мог проводить наземный/надводный транспорт, чья радиальная составляющая "на/от" (по памяти) не была менее 15 км/час (~5 м/сек).
sabakka> Но тут РЛС Авакса и перехватчика. Пусть даже в одно время и с ипользованием одних и тех же достижений этого времени. Это РЛС совершенно разных классов, частотных диапазонов и.т.д.
- Минууутку! Рабочий диапазон (по памяти) АВАКСа 7.5-15 см. У истребителей - 3-х сантиметровый диапазон (мне встречался рабочий диапазон 2.75-4.5см). В чём принципиальная разница?
sabakka> Что за АВАКС, не E-2, случайно? Хотелось бы узнать об этом побольше.
- Нет, E-2 - это "Хокай". АВАКС - E-3.
sabakka> РЛС E-2 ИД-режимов тогда не имела, только импульсный режим с компсационной схемой СДЦ. Видимо она и обеспечивала режекцию ДЧ в пределах ±15 км/ч от нулевой ДЧ, а также от всех ДЧ=(ЧПИ/2*длину_волны)/2*n (где n=1,2....).
- Ню, как это - "не имела"?! В каком году не имела? E-2 Хокай брал цели от предельно малых высот на дальности ~400 км ещё лет 40 тому назад...
sabakka> А много ли движующегося дерьма с Vрад>15км/ч он ещё не отфильтрует: волны на пов-ти моря (ограничение на погодные условия на море есть), колышущиеся деревья, множество едущих автомашин, причём пятнышко от каждой на экране будет не пропорциональным соотношению размера машины и дальности РЛС, а гораздо больше (определяться разрешением по дальности и азимуту), плывущие по небу облака.
- Насчёт облаков ерунда, только у кучево-дождевых есть достаточная плотность давать засветку. А что касается деревьев и гребней волн - я не знаю как они с этим боролись, но факт налицо, - АВАКС позволял улавливать очень малые сдвиги скорости в радиальном направлении. Вероятно, этот диапазон мог (и сегодня может) регулироваться.
sabakka> Даже здесь по-любому шум в области ДЧ скоростей сближения будет выше, так как носитель РЛС движется.
sabakka> Понимаете, одно дело толпа операторов за экранами РЛС Авакса:они видят множество отметок, каждую ведут, определяют по харатеру движения её тип, другое - один оператор за экраном РЛС перехватчика: ему нужно быстрое и чёткое выделение целей, чтоб сразу быть готовым к перехвату, значит нужен более высокий порог фильтрации по скорости, а чтоб фильтровать, нужно эту скорость знать одназначно значит используем высокие ЧПИ, при которых в ЗПС нихрена не видно.
- Это не принципиально, тем не менее.
sabakka> К тому же длина волны у AWG-9 гораздо меньше длины волны у РЛС E-2...
- Причём здесь E-2, у которого 77-88 см (по памяти)? Я говорил о E-3, у которого длина волны вполне соизмерима с длиной волн истребительных.
sabakka> Ну, в 2 раза будет..
- Нигде, никогда, ни в одном военном справочнике 80-х и 90-х годов не встречал этого различия. Видимо - и в 2 раза не будет...
sabakka> APG-71 и AWG-9 используют только ВЧП, так что в их способности видеть цели в ЗПС на фоне земли я сомневаюсь. Кто-то помню отвечал мне, что иранца подтверждали это, надо найти узнать, где об этом прочитать.
- Странные сомнения... Если бы этот факт имел место, он в обязательном порядке был бы оговорен во всех советских учебниках по тактике ВВС, в боевых уставах и пр. - поскольку давал бы безусловные тактические преимущества!
Вуду> кстати, выпущенный примерно в эти же годы АВАКС мог проводить наземный/надводный транспорт, чья радиальная составляющая "на/от" (по памяти) не была менее 15 км/час (~5 м/сек).
sabakka> Но тут РЛС Авакса и перехватчика. Пусть даже в одно время и с ипользованием одних и тех же достижений этого времени. Это РЛС совершенно разных классов, частотных диапазонов и.т.д.
- Минууутку! Рабочий диапазон (по памяти) АВАКСа 7.5-15 см. У истребителей - 3-х сантиметровый диапазон (мне встречался рабочий диапазон 2.75-4.5см). В чём принципиальная разница?
sabakka> Что за АВАКС, не E-2, случайно? Хотелось бы узнать об этом побольше.
- Нет, E-2 - это "Хокай". АВАКС - E-3.
sabakka> РЛС E-2 ИД-режимов тогда не имела, только импульсный режим с компсационной схемой СДЦ. Видимо она и обеспечивала режекцию ДЧ в пределах ±15 км/ч от нулевой ДЧ, а также от всех ДЧ=(ЧПИ/2*длину_волны)/2*n (где n=1,2....).
- Ню, как это - "не имела"?! В каком году не имела? E-2 Хокай брал цели от предельно малых высот на дальности ~400 км ещё лет 40 тому назад...
sabakka> А много ли движующегося дерьма с Vрад>15км/ч он ещё не отфильтрует: волны на пов-ти моря (ограничение на погодные условия на море есть), колышущиеся деревья, множество едущих автомашин, причём пятнышко от каждой на экране будет не пропорциональным соотношению размера машины и дальности РЛС, а гораздо больше (определяться разрешением по дальности и азимуту), плывущие по небу облака.
- Насчёт облаков ерунда, только у кучево-дождевых есть достаточная плотность давать засветку. А что касается деревьев и гребней волн - я не знаю как они с этим боролись, но факт налицо, - АВАКС позволял улавливать очень малые сдвиги скорости в радиальном направлении. Вероятно, этот диапазон мог (и сегодня может) регулироваться.
sabakka> Даже здесь по-любому шум в области ДЧ скоростей сближения будет выше, так как носитель РЛС движется.
sabakka> Понимаете, одно дело толпа операторов за экранами РЛС Авакса:они видят множество отметок, каждую ведут, определяют по харатеру движения её тип, другое - один оператор за экраном РЛС перехватчика: ему нужно быстрое и чёткое выделение целей, чтоб сразу быть готовым к перехвату, значит нужен более высокий порог фильтрации по скорости, а чтоб фильтровать, нужно эту скорость знать одназначно значит используем высокие ЧПИ, при которых в ЗПС нихрена не видно.
- Это не принципиально, тем не менее.
sabakka> К тому же длина волны у AWG-9 гораздо меньше длины волны у РЛС E-2...
- Причём здесь E-2, у которого 77-88 см (по памяти)? Я говорил о E-3, у которого длина волны вполне соизмерима с длиной волн истребительных.
“The only good Indian is a dead Indian”
Это сообщение редактировалось 10.12.2005 в 22:14
Copyright © Balancer 1997..2018
Создано 08.06.2000
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 08.06.2000
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
