-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 umbriel
umbriel

Xan> Когда-то, ещё до x-prize и n-prize меня посетила мысль, что при нынешней электронике можно сделать очень маленькую ракету.
Xan> Прикидочная симуляция дала стартовый вес меньше 10 кг.
Нельзя, из-за аэродинамики
Xan> Прикидочная симуляция дала стартовый вес меньше 10 кг.
Нельзя, из-за аэродинамики


 инфо
инфо инструменты
инструменты Xan
Xan

Xan>> Прикидочная симуляция дала стартовый вес меньше 10 кг.
umbriel> Нельзя, из-за аэродинамики
Я тоже так думал. Думал, минимум несколько тонн надо.
А вот симуляция даёт другое.
Как быть?")
Кто-нибудь пытался на симуляторе запустить ракету, ну, например, на 100 км, регулируя тягу так, чтоб обеспечить минимальный расход/путь?
umbriel> Нельзя, из-за аэродинамики
Я тоже так думал. Думал, минимум несколько тонн надо.
А вот симуляция даёт другое.
Как быть?
Кто-нибудь пытался на симуляторе запустить ракету, ну, например, на 100 км, регулируя тягу так, чтоб обеспечить минимальный расход/путь?

Это сообщение редактировалось 15.12.2008 в 11:38

"В браке по расчёту главное, чтобы расчёт не содержал ошибок" (с)
Какой именно симулятор ты использовал?
и какие параметры, кроме стартовой массы, можешь привести?
у меня получалось, что, при использовании РДТТ промышленного изготовления, например, Star6A, в качестве верхней ступени, можно уложиться в тонну стартовой массы, но 10 кг - это ни в какие ворота не лезет Только это здесь оффтопик.
Какой именно симулятор ты использовал?
и какие параметры, кроме стартовой массы, можешь привести?
у меня получалось, что, при использовании РДТТ промышленного изготовления, например, Star6A, в качестве верхней ступени, можно уложиться в тонну стартовой массы, но 10 кг - это ни в какие ворота не лезет
Только это здесь оффтопик.
А.С.> при использовании РДТТ промышленного изготовления, например, Star6A, в качестве верхней ступени, можно уложиться в тонну стартовой массы
Это вообще без нагрузки?
Это вообще без нагрузки?
Xan>>> Прикидочная симуляция дала стартовый вес меньше 10 кг.
umbriel>> Нельзя, из-за аэродинамики
Xan> Я тоже так думал. Думал, минимум несколько тонн надо.
Xan> А вот симуляция даёт другое.
Xan> Как быть?
Xan> Кто-нибудь пытался на симуляторе запустить ракету, ну, например, на 100 км, регулируя тягу так, чтоб обеспечить минимальный расход/путь?
Кроме того, как ты представляешь управление такой ракетой?
Xan, как с тобой связаться?
umbriel>> Нельзя, из-за аэродинамики
Xan> Я тоже так думал. Думал, минимум несколько тонн надо.
Xan> А вот симуляция даёт другое.
Xan> Как быть?
Xan> Кто-нибудь пытался на симуляторе запустить ракету, ну, например, на 100 км, регулируя тягу так, чтоб обеспечить минимальный расход/путь?
Кроме того, как ты представляешь управление такой ракетой?
Xan, как с тобой связаться?
А.С.>> при использовании РДТТ промышленного изготовления, например, Star6A, в качестве верхней ступени, можно уложиться в тонну стартовой массы
umbriel> Это вообще без нагрузки?
10-20 грамм, как требуется для N-prize, реально, до полукилограмма минус невыгорание топлива в стар6А
Стар6А, честно говоря, это минимальный двигатель из тех, что имеются у Вэйда в энциклопедии, с хорошим соотношением полного и пустого, ещё меньшие двигатели обеспечивают ГОРАЗДО меньшую ХС.
Снаряжённая масса: 4.52 кг
Масса пустого: 1.25 кг
УИ: 285 с
Диаметр 0.16 м
полный импульс 935 кГ*с
Массовое совершенство 0.723.
Берём Star13А в качестве предыдущей ступени:
Снаряжённая масса 38 кг
Масса пустого 5.00 кг
УИ: 287 с
Диаметр 0.34 м
Если ещё взять Star17A на первую ступень:
Снаряжённая масса 126 кг
Масса пустого 14 кг
УИ: 287 с
Диаметр 0.44 м
Длина 0.98 м
У этих 3х ступеней суммарная ХС около 10,5 км/с, что достаточно для выхода на НЗО. Но как-то нужно обеспечить программный разворот по тангажу, да и запускать желательно с воздушного шара, т.к. у всех СТАР-ов высотные сопла. Не говоря уж о баллистической паузе после окончания работы Стар-17А. Стартовая масса такой "ракеты" превысит 150 кг из-за необходимости УВТ и средств разделения (и ещё ГО, понятно, прикрывающего верхние шарики).
Только всё это здесь злостный оффтопик!!!
umbriel> Это вообще без нагрузки?
10-20 грамм, как требуется для N-prize, реально, до полукилограмма минус невыгорание топлива в стар6А
Стар6А, честно говоря, это минимальный двигатель из тех, что имеются у Вэйда в энциклопедии, с хорошим соотношением полного и пустого, ещё меньшие двигатели обеспечивают ГОРАЗДО меньшую ХС.
Снаряжённая масса: 4.52 кг
Масса пустого: 1.25 кг
УИ: 285 с
Диаметр 0.16 м
полный импульс 935 кГ*с
Массовое совершенство 0.723.
Берём Star13А в качестве предыдущей ступени:
Снаряжённая масса 38 кг
Масса пустого 5.00 кг
УИ: 287 с
Диаметр 0.34 м
Если ещё взять Star17A на первую ступень:
Снаряжённая масса 126 кг
Масса пустого 14 кг
УИ: 287 с
Диаметр 0.44 м
Длина 0.98 м
У этих 3х ступеней суммарная ХС около 10,5 км/с, что достаточно для выхода на НЗО. Но как-то нужно обеспечить программный разворот по тангажу, да и запускать желательно с воздушного шара, т.к. у всех СТАР-ов высотные сопла. Не говоря уж о баллистической паузе после окончания работы Стар-17А. Стартовая масса такой "ракеты" превысит 150 кг из-за необходимости УВТ и средств разделения (и ещё ГО, понятно, прикрывающего верхние шарики).
Только всё это здесь злостный оффтопик!!!
А.С.> "В браке по расчёту главное, чтобы расчёт не содержал ошибок" (с)
Хорошо сказано!
А то я знаю одних учёных, привыкших небрежно в статьях нолики перекидывать, так вот они в бухгалтерии ошиблись на порядок, а потом пахали как на галерах!
А.С.> Какой именно симулятор ты использовал?
Только самодельный.
А.С.> и какие параметры, кроме стартовой массы, можешь привести?
Сделал новую тему.
umbriel> Xan, как с тобой связаться?
Ксан_Седов на мейлру
Хорошо сказано!
А то я знаю одних учёных, привыкших небрежно в статьях нолики перекидывать, так вот они в бухгалтерии ошиблись на порядок, а потом пахали как на галерах!
А.С.> Какой именно симулятор ты использовал?
Только самодельный.
А.С.> и какие параметры, кроме стартовой массы, можешь привести?
Сделал новую тему.
umbriel> Xan, как с тобой связаться?
Ксан_Седов на мейлру

Электронное оборудование ракет - БРЭО,часть XIV [Piroman#19.01.09 11:34]
начало части обсуждения про использовани гироскопов в теме БРЭО
продолжу.
сейчас проверил. Для ENC03 изменение ускорение перпендикулярно плоскости мотажа датчика в диапазоне ± 1G не приводит и уходу 0 более чем на 1,2 мВ (что составляет 1/3 от град/сек) а меншее значение мне сейчас не отследить.
вывод. данным эффектом пока пренебрегаем.
готов рассмотреть способ проверки с большим значением ускорения.
начало части обсуждения про использовани гироскопов в теме БРЭО
продолжу.
сейчас проверил. Для ENC03 изменение ускорение перпендикулярно плоскости мотажа датчика в диапазоне ± 1G не приводит и уходу 0 более чем на 1,2 мВ (что составляет 1/3 от град/сек) а меншее значение мне сейчас не отследить.
вывод. данным эффектом пока пренебрегаем.
готов рассмотреть способ проверки с большим значением ускорения.

 Non-conformist
Non-conformist

Piroman> готов рассмотреть способ проверки с большим значением ускорения.
Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
Приклеить испытуемый датчик на защитный колпачок диффузора НЧ-динамика, приклеить рядом с ним ADXL, и дать сигнал определенной частоты. Показания гироскопа окажутся промодулированными известным ускорением. Оценить глубину модуляции.
Piroman> сейчас проверил. Для ENC03 изменение ускорение перпендикулярно плоскости мотажа датчика в диапазоне ± 1G не приводит и уходу 0 более чем на 1,2 мВ (что составляет 1/3 от град/сек).
Неплохо.
Piroman> вывод. данным эффектом пока пренебрегаем.
Но если умножить 1 секунду * 30 g * 1/3 от град/сек, то получим 10 градусов отклонения.
Piroman> готов рассмотреть способ проверки с большим значением ускорения.
Можно сделать что-то движущееся возвратно-поступательно вверх/вниз. Кривошип, шатун, то сё.
Ну, надо хорошую направляющую, чтоб во время движения не было вращения.
А для компенсации остатков вращения измерять при двух противоположных ориентациях.
Конечно, за период колебания измерять (синхронно с колебаниями) несколько точек, чтоб получить зависимость от мгновенного ускорения.
Можно датчик ускорения рядом приделать для синхронизации.
Так как про гироскоп написано "50 Гц" (непонятно чего именно), то частоту колебаний надо брать в несколько раз ниже.
При 10 Гц чтобы получить ускорение 10 g надо амплитуду 25 мм.
При 3 Гц - 280 мм.
Можно, конечно, взять платформу, свободно подвешенную на пружине, и использовать её колебания.
Но там надо победить все остальные моды, кроме основной.
На картинке:
Две пружинки, предварительно растянутые, чтоб в работе они всегда только тянули (не толкали);
В центре платформа с испытуемым;
Четыре рычага с грузиками для подавления (увеличения периода) ненужных мод.
Неплохо.
Piroman> вывод. данным эффектом пока пренебрегаем.
Но если умножить 1 секунду * 30 g * 1/3 от град/сек, то получим 10 градусов отклонения.
Piroman> готов рассмотреть способ проверки с большим значением ускорения.
Можно сделать что-то движущееся возвратно-поступательно вверх/вниз. Кривошип, шатун, то сё.
Ну, надо хорошую направляющую, чтоб во время движения не было вращения.
А для компенсации остатков вращения измерять при двух противоположных ориентациях.
Конечно, за период колебания измерять (синхронно с колебаниями) несколько точек, чтоб получить зависимость от мгновенного ускорения.
Можно датчик ускорения рядом приделать для синхронизации.
Так как про гироскоп написано "50 Гц" (непонятно чего именно), то частоту колебаний надо брать в несколько раз ниже.
При 10 Гц чтобы получить ускорение 10 g надо амплитуду 25 мм.
При 3 Гц - 280 мм.
Можно, конечно, взять платформу, свободно подвешенную на пружине, и использовать её колебания.
Но там надо победить все остальные моды, кроме основной.
На картинке:
Две пружинки, предварительно растянутые, чтоб в работе они всегда только тянули (не толкали);
В центре платформа с испытуемым;
Четыре рычага с грузиками для подавления (увеличения периода) ненужных мод.
Прикреплённые файлы:

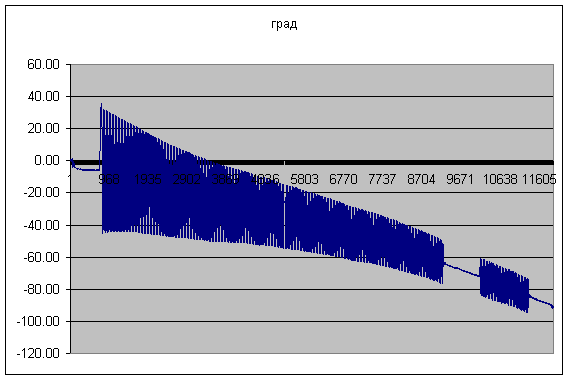
реальный результат интегрирования показателей гироскопа ENC03 включенного по схеме без фильтра нижних частот (в даташите данный фильтр присутствует)
за время тестирования температура поверхности корпуса гироскопа изменилась на 0,5 градуса.
до начала тестиирования система была выдержана во включенном состоянии 15 минут для установления теплового баланса.
для тестирования использовался мегаточный прибор - маятник. Длина подвеса 82 см.
амплитуда отклонения стартовая для первой попытки - 45 см по горизонтали. для второй попытки - 12 см.
имеем : за 10 минут интегрирование дало ошибку в 90 градусов.
за время тестирования температура поверхности корпуса гироскопа изменилась на 0,5 градуса.
до начала тестиирования система была выдержана во включенном состоянии 15 минут для установления теплового баланса.
для тестирования использовался мегаточный прибор - маятник. Длина подвеса 82 см.
амплитуда отклонения стартовая для первой попытки - 45 см по горизонтали. для второй попытки - 12 см.
имеем : за 10 минут интегрирование дало ошибку в 90 градусов.
Прикреплённые файлы:
Это сообщение редактировалось 03.02.2009 в 01:17
То, что ты называешь фильтром нижних частот, на самом деле, фильтр верхних частот (не пропускает нижние и постоянку).
А я исследовал поведение ADIS16251. Он постабильнее, конечно. Но его процедура автоопределения нуля глючит безбожно. Я в своё время предпочёл его термокомпенсированному ADIS16255 за то, что мне больше нравятся диапазоны 20 40 и 80 град/с, чем 80, 160 и 320 град/с.
В общем, он меня скорее разочаровал. Он, конечно, лучше, чем ENC-03, и даже, наверно, в разы, но не в десяток раз. Самое большее - в четыре.
Процедура автоопределения нуля "отличается умом и сообразительностью". Правда, если править ноль вручную, можно добиться того, чтобы угол после интегрирования уходил не более, чем на градус за минуту. Пиковое значение шумов на полной полосе сигнала (40 Гц, вроде бы) - 0,6 градуса в секунду при диапазоне 20 градусов в секунду. Правда, если полосу уменьшить в 16 раз, можно снизить и пиковое, и среднеквадратичное значение шумов вчетверо, т.е. до 0,15 град/с пиковое и 0,05 град/с среднеквадратичное, что, в общем, даже лучше заявленного в даташите...
А я исследовал поведение ADIS16251. Он постабильнее, конечно. Но его процедура автоопределения нуля глючит безбожно. Я в своё время предпочёл его термокомпенсированному ADIS16255 за то, что мне больше нравятся диапазоны 20 40 и 80 град/с, чем 80, 160 и 320 град/с.
В общем, он меня скорее разочаровал. Он, конечно, лучше, чем ENC-03, и даже, наверно, в разы, но не в десяток раз. Самое большее - в четыре.
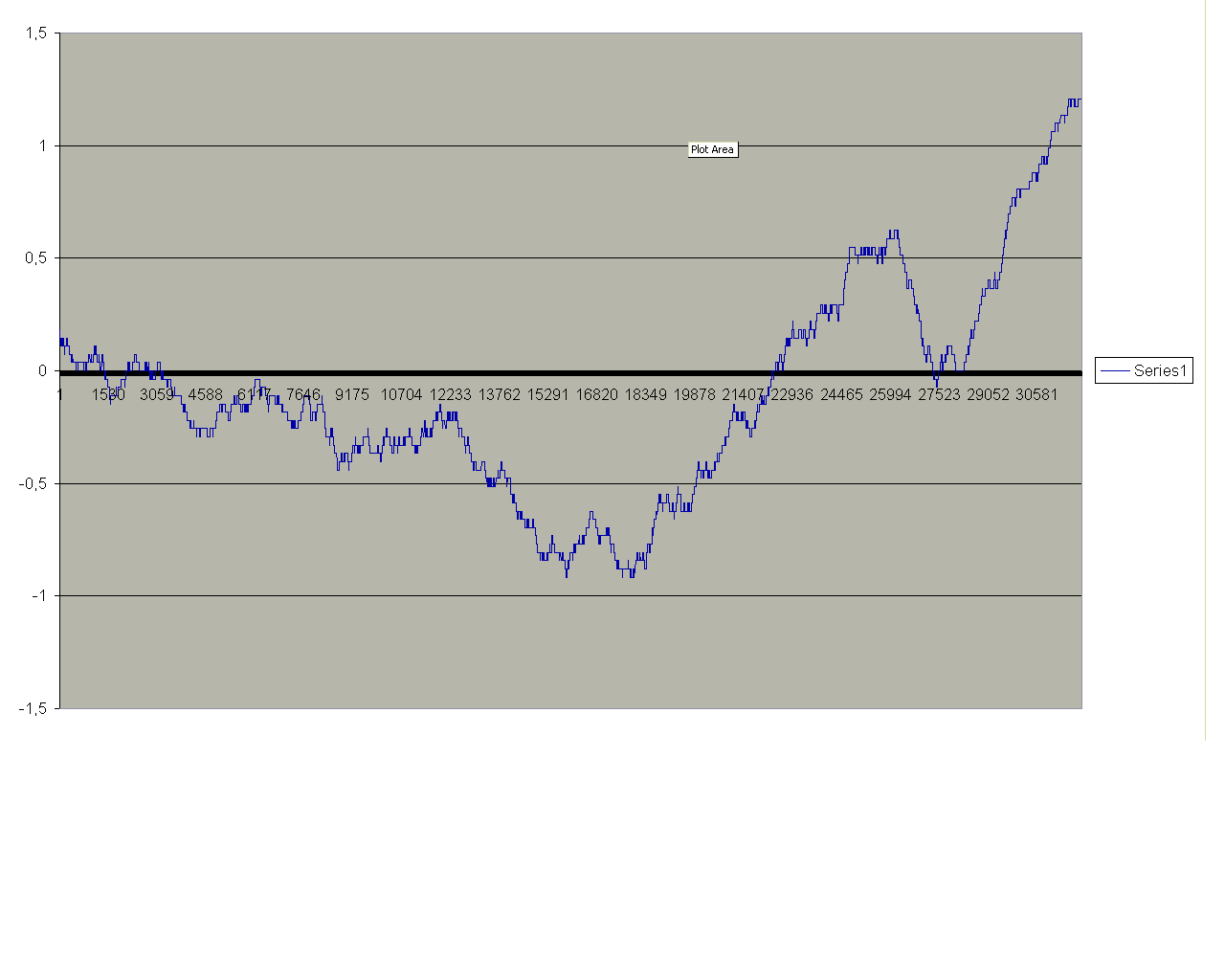
Процедура автоопределения нуля "отличается умом и сообразительностью". Правда, если править ноль вручную, можно добиться того, чтобы угол после интегрирования уходил не более, чем на градус за минуту. Пиковое значение шумов на полной полосе сигнала (40 Гц, вроде бы) - 0,6 градуса в секунду при диапазоне 20 градусов в секунду. Правда, если полосу уменьшить в 16 раз, можно снизить и пиковое, и среднеквадратичное значение шумов вчетверо, т.е. до 0,15 град/с пиковое и 0,05 град/с среднеквадратичное, что, в общем, даже лучше заявленного в даташите...
Вот графичек шума угловой скорости
Прикреплённые файлы:

А вот график ухода угла за четыре минуты
Прикреплённые файлы:
А какие гироскопы вообще на больших ракетах? Механические? ")
umbriel> А какие гироскопы вообще на больших ракетах? Механические?
В одной из серий "Ударной силы" Ильин сказал, что в "Тополях" стоят лазерные. И показал кирпичик объемом примерно с пару сигаретных пачек.
В одной из серий "Ударной силы" Ильин сказал, что в "Тополях" стоят лазерные. И показал кирпичик объемом примерно с пару сигаретных пачек.

Интересно, там объемный световод или планарный ?
Твердотельный лазерный гироскоп - это конструктивно монокристаллическая пластина LiNbO3 c кольцевыми поверхностными световодами (титановые полоски). Или объемные, из кварца.
Пластина - четыре кв.см. плюс корпус, плюс оптические разъемы, толщина с корпусом 1 см. максимум.
Твердотельный лазерный гироскоп - это конструктивно монокристаллическая пластина LiNbO3 c кольцевыми поверхностными световодами (титановые полоски). Или объемные, из кварца.
Пластина - четыре кв.см. плюс корпус, плюс оптические разъемы, толщина с корпусом 1 см. максимум.

umbriel> А какие гироскопы вообще на больших ракетах? Механические?
Слышал, что на больших ракетах стоят и механические, и лазерные. Механические плохо воспринимают ударную нагрузку, а у лазерных зона нечувствительности около нуля (т.е. плохо определяют малые угловые скорости). В паре это дает хорошую точность.
Слышал, что на больших ракетах стоят и механические, и лазерные. Механические плохо воспринимают ударную нагрузку, а у лазерных зона нечувствительности около нуля (т.е. плохо определяют малые угловые скорости). В паре это дает хорошую точность.

На 11А511У-ФГ, на которой летают космонавты, стоят только механические гироскопы. Больше того, у неё нет гиростабилизированной платформы, ни на пакете, ни на третьей ступени (у них отдельные системы управления).
Вообще, лазерные гироскопы не очень хороши для РН и КА. Но БИНС всегда строят на немеханических гироскопах. Например, волновых. Или оптоволоконных. Там нужны датчики угловой скорости, а не угла.
Вообще, большинство нетрадиционных датчиков - это датчики угловых скоростей, а не углов. А вот свободный гироскоп хорош именно в качестве измерителя углов. Чтобы сделать из него датчик угловой скорости, приходится вводить датчик момента, который, на самом деле, не датчик, а ЗАДАТЧИК момента - и тогда получается, что отклонение оси гироскопа пропорционально угловой скорости.
Вообще, лазерные гироскопы не очень хороши для РН и КА. Но БИНС всегда строят на немеханических гироскопах. Например, волновых. Или оптоволоконных. Там нужны датчики угловой скорости, а не угла.
Вообще, большинство нетрадиционных датчиков - это датчики угловых скоростей, а не углов. А вот свободный гироскоп хорош именно в качестве измерителя углов. Чтобы сделать из него датчик угловой скорости, приходится вводить датчик момента, который, на самом деле, не датчик, а ЗАДАТЧИК момента - и тогда получается, что отклонение оси гироскопа пропорционально угловой скорости.
А какие гироскопы были бы лучше для МОДЕЛЕЙ (не межпланетных, не космических и даже не стратосферных) - если бы имелся выбор? Нетрадиционные или механические?

А.С.> ...приходится вводить датчик момента, который, на самом деле, не датчик, а ЗАДАТЧИК момента - и тогда получается, что отклонение оси гироскопа пропорционально угловой скорости.
Андрюха... тут чо-то не так. Учили иначе.
Андрюха... тут чо-то не так. Учили иначе.
Non-conformist> А какие гироскопы были бы лучше для МОДЕЛЕЙ (не межпланетных, не космических и даже не стратосферных) - если бы имелся выбор? Нетрадиционные или механические?
Дешёвые. И прочные. То есть - MEMS, или, в просторечии, пьезогироскопы. Те самые, с которыми мы с Пироманом экспериментируем.
Правда, механический гироскоп можно использовать для непосредственной стабилизации ракетомодели (силовой гироскоп), безо всякой СУ. Но - один удар о землю - и ось погнута.
Дешёвые. И прочные. То есть - MEMS, или, в просторечии, пьезогироскопы. Те самые, с которыми мы с Пироманом экспериментируем.
Правда, механический гироскоп можно использовать для непосредственной стабилизации ракетомодели (силовой гироскоп), безо всякой СУ. Но - один удар о землю - и ось погнута.
А.С.>> ...приходится вводить датчик момента, который, на самом деле, не датчик, а ЗАДАТЧИК момента - и тогда получается, что отклонение оси гироскопа пропорционально угловой скорости.
Anika> Андрюха... тут чо-то не так. Учили иначе.
Коля! у тебя ложная память У меня Феодосьев под рукой, "основы техники ракетного полёта", у двухстепенного гироскопа на одном конце датчик угла, на другом - датчик момента, который вырабатывает момент, пропорциональный углу отклонения.
Anika> Андрюха... тут чо-то не так. Учили иначе.
Коля! у тебя ложная память
У меня Феодосьев под рукой, "основы техники ракетного полёта", у двухстепенного гироскопа на одном конце датчик угла, на другом - датчик момента, который вырабатывает момент, пропорциональный углу отклонения.
А.С.> Правда, механический гироскоп можно использовать для непосредственной стабилизации ракетомодели (силовой гироскоп), безо всякой СУ. Но - один удар о землю - и ось погнута.
Так ведь можно ограничители усилия сделать. И ничего не погнётся.
Так ведь можно ограничители усилия сделать. И ничего не погнётся.
Пьезогироскопы (для моделей) - вне конкуренции.
Не зря на них делаются коммерческие приборы для моделистов.
Если сильно "чешется", можно сотворить цацку-самоделку: компенсационный маятниковый акселерометр.
Разрешение 0,002G при полной шкале 5G удалось в свое время получить.
Не зря на них делаются коммерческие приборы для моделистов.
Если сильно "чешется", можно сотворить цацку-самоделку: компенсационный маятниковый акселерометр.
Разрешение 0,002G при полной шкале 5G удалось в свое время получить.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
