 SashaMaks
SashaMaks

 инфо
инфо инструменты
инструменты Xan
Xan


 pinko
pinko
 Xan
Xan
 Реклама Google — средство выживания форумов :)
Реклама Google — средство выживания форумов :)
-
![[image]](https://www.balancer.ru/cache/sites/org/po/postimg/s6/prtyadwwx/128x128-crop/IRLML6244.jpg)
Споры с SashaPro
Теги:
Б.г.> Суммирование чего и для чего?
Суммирование измеренных данных с акселерометра и гироскопа для точного вычисления перемещения объекта в пространстве.
Б.г.> ...но, при реально применяемых фильтрах (баттерворта 5 порядка, например)
Б.г.> ...Полезный сигнал есть полезный сигнал, а вот то, с чем он складывается, надо правильно уметь давить.
Ясно, у нас разный взгляд на вещи. Я вообще не собираюсь применять фильтры против полезного сигнала. Я, например, вообще сначала хочу узнать частоты полезного сигнала, а уже потом определяться с частотой измерения.
Б.г.> Полезный сигнал не складывается.
Я уже ничего не понимаю. А тебе для чего гироскоп нужен?
Б.г.> Их надо отфильтровать так, чтобы они на датчик не попали. Притом, реально, как раз, килогерцовые вибрации фильтруются неплохо простым пенопластовым вкладышем и фанерной стенкой.
А если это полезный сигнал? Ты проверял где будет точность выше с фильтром или без на практике?
Б.г.> Датчик не разложит его обратно, потому что килогерц - это вообще за пределами полосы его пропускания.
Я писал про модуль измеряемой величины, а не частоту.
Б.г.> Для целей навигации колебания нужно не мерять, от них нужно уметь отстраиваться.
Ну так это своя СУ для своей конкретной ракеты, "шаг в сторону - расстрел".
Б.г.> Вот возьмём АЦП AD7793. И с 2 бит точность повышается до 24.
Т.е. у него АЦП 2 бит? Можно меня носом ткнуть в то, место, где это видно наглядно?
Б.г.> Саша, ну, давай, встретимся в Москве, и я покажу тебе, как встроенный АЦП АТМеги8, с его разрядностью 10 и опорным напряжением 5 вольт будет регистрировать изменение входного напряжения на 0,1 милливольта? Без усилителя, чисто за счёт суммирования сэмплов.
Бы с удовольствием, но у меня не фирма и средств, только ради этого ехать в Москву, таких нет.
А воспроизводимость результата? Постоянство измерений во времени? И все то же самое на всех уровнях измеряемой величины?
Б.г.> Причём, не только в случае перехода от 5 милливольт к 5,1, что можно списать на точное попадание на порог кванта АЦП, но и при переходе от 5,1 к 5,2 и при переходе от 5,2 к 5,3.
Так 0,1 от 5 - это всего лишь ±1%?
Б.г.> Правда, для этого нужно, чтобы они работали от одного источника опорного напряжения, и встроенный ИОН АТМеги для этого недостаточно хорош. Б.г.> Но у меня есть AD586, и атмега может его использовать.
Б.г.> физика устроена сложнее, чем написано в учебнике по физике, к сожалению.
Так тут речь не о физике, а о желаниях или о том, что ещё не сделано, а как бы всё хорошо могло получиться, но пока этого нет.
Суммирование измеренных данных с акселерометра и гироскопа для точного вычисления перемещения объекта в пространстве.
Б.г.> ...но, при реально применяемых фильтрах (баттерворта 5 порядка, например)
Б.г.> ...Полезный сигнал есть полезный сигнал, а вот то, с чем он складывается, надо правильно уметь давить.
Ясно, у нас разный взгляд на вещи. Я вообще не собираюсь применять фильтры против полезного сигнала. Я, например, вообще сначала хочу узнать частоты полезного сигнала, а уже потом определяться с частотой измерения.
Б.г.> Полезный сигнал не складывается.
Я уже ничего не понимаю. А тебе для чего гироскоп нужен?
Б.г.> Их надо отфильтровать так, чтобы они на датчик не попали. Притом, реально, как раз, килогерцовые вибрации фильтруются неплохо простым пенопластовым вкладышем и фанерной стенкой.
А если это полезный сигнал? Ты проверял где будет точность выше с фильтром или без на практике?
Б.г.> Датчик не разложит его обратно, потому что килогерц - это вообще за пределами полосы его пропускания.
Я писал про модуль измеряемой величины, а не частоту.
Б.г.> Для целей навигации колебания нужно не мерять, от них нужно уметь отстраиваться.
Ну так это своя СУ для своей конкретной ракеты, "шаг в сторону - расстрел".
Б.г.> Вот возьмём АЦП AD7793. И с 2 бит точность повышается до 24.
Т.е. у него АЦП 2 бит? Можно меня носом ткнуть в то, место, где это видно наглядно?
Б.г.> Саша, ну, давай, встретимся в Москве, и я покажу тебе, как встроенный АЦП АТМеги8, с его разрядностью 10 и опорным напряжением 5 вольт будет регистрировать изменение входного напряжения на 0,1 милливольта? Без усилителя, чисто за счёт суммирования сэмплов.
Бы с удовольствием, но у меня не фирма и средств, только ради этого ехать в Москву, таких нет.
А воспроизводимость результата? Постоянство измерений во времени? И все то же самое на всех уровнях измеряемой величины?
Б.г.> Причём, не только в случае перехода от 5 милливольт к 5,1, что можно списать на точное попадание на порог кванта АЦП, но и при переходе от 5,1 к 5,2 и при переходе от 5,2 к 5,3.
Так 0,1 от 5 - это всего лишь ±1%?
Б.г.> Правда, для этого нужно, чтобы они работали от одного источника опорного напряжения, и встроенный ИОН АТМеги для этого недостаточно хорош. Б.г.> Но у меня есть AD586, и атмега может его использовать.
Б.г.> физика устроена сложнее, чем написано в учебнике по физике, к сожалению.
Так тут речь не о физике, а о желаниях или о том, что ещё не сделано, а как бы всё хорошо могло получиться, но пока этого нет.


SashaMaks> Но как это сделать, не имея возможности точно измерять все возможные частоты множества случайных колебаний, кроме как достаточной частотой выборки, я себе просто не представляю.
Б.Голд, Ч.Рэйдер Цифровая обработка сигналов.
Там всё написано.
Суммирование нескольких отсчётов подряд = один из множества цифровых фильтров. Самый примитивный.
Б.Голд, Ч.Рэйдер Цифровая обработка сигналов.
Там всё написано.
Суммирование нескольких отсчётов подряд = один из множества цифровых фильтров. Самый примитивный.

18.08.2016 09:03, SashaMaks: -1: За систематическое осеорбление личности, за неприятие критики и за антинаучный бред в виде обоснования своей правоты личным мнением о человеке. Короче, за злостную и злобную дискриминацию.

Б.г.>> Вот возьмём АЦП AD7793. И с 2 бит точность повышается до 24.
SashaMaks> Т.е. у него АЦП 2 бит? Можно меня носом ткнуть в то, место, где это видно наглядно?
На схеме виден ОДНОБИТОВЫЙ ЦАП И компаратор, который работает однобитовым АЦП. Это АЦП с модулятором первого порядка.
SashaMaks> А воспроизводимость результата?
А, что, миллион измерений - это ещё не воспроизводимость?
SashaMaks> Постоянство измерений во времени? И все то же самое на всех уровнях измеряемой величины?
Да,я ж тебе об этом и пишу - это упрётся в другие части, не АЦП, а опорник, источник питания, клеммник и провода. Но, да, можно. АЦП Меги8 будет врать вблизи краёв диапазона - есть у него такое свойство. Но оно известно, и связано, в основном, с тем, что у Меги нет отрицательного питания.
Б.г.>> Причём, не только в случае перехода от 5 милливольт к 5,1, что можно списать на точное попадание на порог кванта АЦП, но и при переходе от 5,1 к 5,2 и при переходе от 5,2 к 5,3.
SashaMaks> Так 0,1 от 5 - это всего лишь ±1%?
Так 5 милливольт от 5 вольт (диапазон АЦП меги8) это уже 0,1%, а я предлагаю померять 1/50 от 0,1%.
SashaMaks> Т.е. у него АЦП 2 бит? Можно меня носом ткнуть в то, место, где это видно наглядно?
На схеме виден ОДНОБИТОВЫЙ ЦАП И компаратор, который работает однобитовым АЦП. Это АЦП с модулятором первого порядка.
SashaMaks> А воспроизводимость результата?
А, что, миллион измерений - это ещё не воспроизводимость?
SashaMaks> Постоянство измерений во времени? И все то же самое на всех уровнях измеряемой величины?
Да,я ж тебе об этом и пишу - это упрётся в другие части, не АЦП, а опорник, источник питания, клеммник и провода. Но, да, можно. АЦП Меги8 будет врать вблизи краёв диапазона - есть у него такое свойство. Но оно известно, и связано, в основном, с тем, что у Меги нет отрицательного питания.
Б.г.>> Причём, не только в случае перехода от 5 милливольт к 5,1, что можно списать на точное попадание на порог кванта АЦП, но и при переходе от 5,1 к 5,2 и при переходе от 5,2 к 5,3.
SashaMaks> Так 0,1 от 5 - это всего лишь ±1%?
Так 5 милливольт от 5 вольт (диапазон АЦП меги8) это уже 0,1%, а я предлагаю померять 1/50 от 0,1%.

Б.г.> На схеме виден ОДНОБИТОВЫЙ ЦАП И компаратор, который работает однобитовым АЦП. Это АЦП с модулятором первого порядка.
Погоди, так это вроде схема измерения уровня сигнала, а не его суммирование уже готового? А от куда эта картинка?
Б.г.> А, что, миллион измерений - это ещё не воспроизводимость?
А где они?
Это так долго, что ещё никто такого не делал, особенно при 1Гц и менее)))
Б.г.> Да,я ж тебе об этом и пишу - это упрётся в другие части, не АЦП, а опорник, источник питания, клеммник и провода.
Я про "измерение" пишу, а не про некие электротехнические идеалы, которые всё равно разбиваются об окружающую действительность.
Б.г.> Так 5 милливольт от 5 вольт (диапазон АЦП меги8) это уже 0,1%, а я предлагаю померять 1/50 от 0,1%.
Ааа.
А отсутствие повторяемости будешь списывать на температуру, ветер или ещё чего? Может тогда взять АЦП по хуже?
Погоди, так это вроде схема измерения уровня сигнала, а не его суммирование уже готового? А от куда эта картинка?
Б.г.> А, что, миллион измерений - это ещё не воспроизводимость?
А где они?
Это так долго, что ещё никто такого не делал, особенно при 1Гц и менее)))
Б.г.> Да,я ж тебе об этом и пишу - это упрётся в другие части, не АЦП, а опорник, источник питания, клеммник и провода.
Я про "измерение" пишу, а не про некие электротехнические идеалы, которые всё равно разбиваются об окружающую действительность.
Б.г.> Так 5 милливольт от 5 вольт (диапазон АЦП меги8) это уже 0,1%, а я предлагаю померять 1/50 от 0,1%.
Ааа.
А отсутствие повторяемости будешь списывать на температуру, ветер или ещё чего? Может тогда взять АЦП по хуже?
Xan> Суммирование нескольких отсчётов подряд = один из множества цифровых фильтров. Самый примитивный.
А что будет с точностью проводимого измерения после применения этого фильтра? Она будет уменьшаться?
Какой смысл фильтровать полезный сигнал?
А что будет с точностью проводимого измерения после применения этого фильтра? Она будет уменьшаться?
Какой смысл фильтровать полезный сигнал?
Б.г.> Сам по себе оверсэмплинг не является помехозащитным алгоритмом
Так и я писал, что он таким не является.
Б.г.> но он может частично давить помехи, если их частотный диапазон выше частотного диапазона сигнала.
Вот именно это и есть главное условие работоспособности алгоритма pinko в его барометрическом датчике апогея. Но, это хорошо, когда помехи по амплитуде всегда находятся в одном и том же пределе. Если они его на какое-то время превысят, то станут полезным сигналом, где даже на ровном месте (в покое) найдётся такая конфигурация данных во времени, которая, например, сможет удовлетворить условию старта. Итог: ракета стоит на месте, а программа уже думает, что летит.
Т.е. на том же примере барометрического датчика pinko нужен именно 10-битный АЦП, так как уровень собственных шумов типичного аналогового датчика находится в на уровне 9-10-битного АЦП. Т.е. примерно столько же или немного выше. Т.е. шумы с датчика будут хорошо видны. Поскольку, применяется не очень быстрый ЦП, то делать много сложений не получится, поэтому лучше 10-бит АЦП, а не 12-бит, так как сложений меньше нужно, чтобы убрать шумы. Теперь самое главное - это деление. В простом суммировании для повышения точности делить совсем не обязательно, а для работы его алгоритма обязательно, иначе ничего не получится. Он и делает побитовый сдвиг суммы.
Т.е. разница между просуммированными значениями ещё более значительна в целочисленном выражении, чем в исходном не суммированном виде. А вот после деления или побитового сдвига разница между полученными значениями уже после деления становится на уровне ниже 1/1024, то в большинстве случаев смежные значения не смогут меняться вообще. Будет нитевидный сигнал, монотонно меняющийся целочисленно только в диапазоне {0, 1023}.
Но если исходные шумы станут на уровне 7-8 бит, то жестко заданной суммы и побитового сдвига уже не хватит для того, чтобы скрыть шумы таким образом. Они снова появятся и логика программы будет давать сбои. Будет снова шумоподобный сигнал меняющийся целочисленно только в диапазоне {0, 1023}.
Логично, что если ему попробовать использовать хотя бы 16-битный АЦП, то возникнут проблемы со сложением и сокрытием шумов, так как датчик шумит на уровне 9-бит, то складывать придётся настолько много раз, что его ЦП с этим просто не справится. Тогда, даже если выжать максимум, то после сдвига всё равно будет шум, так как сигнал будет меняться целочисленно только в диапазоне {0, 65535}
Или короче:
При одинаковом доступном количестве сложений и последующего деления получается, что уровень шума будет снижаться от 1/512, ну допустим, до 1/4096. Тогда такой шум исчезнет на целочисленном диапазоне {0, 1023} и останется на целочисленном диапазоне {0, 65535}. Тут изменения в шумах составят ±16 попугаев. При таком уровне шумов его алгоритм работать не будет, т.е. надёжность будет настолько низкая, что почти ни одного успешного срабатывания программы не получить.
Казалось, можно выбрать сразу АЦП 8 бит вместо 10 бит и ничего не складывать? Но 1/256 маловато будет для рекламы чувствительности прибора.")
Так и я писал, что он таким не является.
Б.г.> но он может частично давить помехи, если их частотный диапазон выше частотного диапазона сигнала.
Вот именно это и есть главное условие работоспособности алгоритма pinko в его барометрическом датчике апогея. Но, это хорошо, когда помехи по амплитуде всегда находятся в одном и том же пределе. Если они его на какое-то время превысят, то станут полезным сигналом, где даже на ровном месте (в покое) найдётся такая конфигурация данных во времени, которая, например, сможет удовлетворить условию старта. Итог: ракета стоит на месте, а программа уже думает, что летит.
Т.е. на том же примере барометрического датчика pinko нужен именно 10-битный АЦП, так как уровень собственных шумов типичного аналогового датчика находится в на уровне 9-10-битного АЦП. Т.е. примерно столько же или немного выше. Т.е. шумы с датчика будут хорошо видны. Поскольку, применяется не очень быстрый ЦП, то делать много сложений не получится, поэтому лучше 10-бит АЦП, а не 12-бит, так как сложений меньше нужно, чтобы убрать шумы. Теперь самое главное - это деление. В простом суммировании для повышения точности делить совсем не обязательно, а для работы его алгоритма обязательно, иначе ничего не получится. Он и делает побитовый сдвиг суммы.
Т.е. разница между просуммированными значениями ещё более значительна в целочисленном выражении, чем в исходном не суммированном виде. А вот после деления или побитового сдвига разница между полученными значениями уже после деления становится на уровне ниже 1/1024, то в большинстве случаев смежные значения не смогут меняться вообще. Будет нитевидный сигнал, монотонно меняющийся целочисленно только в диапазоне {0, 1023}.
Но если исходные шумы станут на уровне 7-8 бит, то жестко заданной суммы и побитового сдвига уже не хватит для того, чтобы скрыть шумы таким образом. Они снова появятся и логика программы будет давать сбои. Будет снова шумоподобный сигнал меняющийся целочисленно только в диапазоне {0, 1023}.
Логично, что если ему попробовать использовать хотя бы 16-битный АЦП, то возникнут проблемы со сложением и сокрытием шумов, так как датчик шумит на уровне 9-бит, то складывать придётся настолько много раз, что его ЦП с этим просто не справится. Тогда, даже если выжать максимум, то после сдвига всё равно будет шум, так как сигнал будет меняться целочисленно только в диапазоне {0, 65535}
Или короче:
При одинаковом доступном количестве сложений и последующего деления получается, что уровень шума будет снижаться от 1/512, ну допустим, до 1/4096. Тогда такой шум исчезнет на целочисленном диапазоне {0, 1023} и останется на целочисленном диапазоне {0, 65535}. Тут изменения в шумах составят ±16 попугаев. При таком уровне шумов его алгоритм работать не будет, т.е. надёжность будет настолько низкая, что почти ни одного успешного срабатывания программы не получить.
Казалось, можно выбрать сразу АЦП 8 бит вместо 10 бит и ничего не складывать? Но 1/256 маловато будет для рекламы чувствительности прибора.

SashaMaks>Так это, на водоракетном форуме есть алгоритм. Я его полностью проанализировал, как и всё, что ты писал.
SashaMaks> pinko в его барометрическом датчике апогея
Саша, ето был пример для Брата как применить скользящее среднее с переменным окном в ATmega, чтобы обнаружить апогей более надежно для его водных ракет.
Я сказал что скользящее среднее с переменным окном является одним из филтры, которые я использую в моей БРЭО и таким образом ты не видели исходный код, но думаеш что это все что есть в прошивке?")
SashaMaks> pinko в его барометрическом датчике апогея
Саша, ето был пример для Брата как применить скользящее среднее с переменным окном в ATmega, чтобы обнаружить апогей более надежно для его водных ракет.
Я сказал что скользящее среднее с переменным окном является одним из филтры, которые я использую в моей БРЭО и таким образом ты не видели исходный код, но думаеш что это все что есть в прошивке?
SashaMaks> барометрического датчика pinko нужен именно 10-битный АЦП, так как уровень собственных шумов типичного аналогового датчика находится в на уровне 9-10-битного АЦП.
Как я тебе уже объяснял - нет никакой разницы между аналоговым и цифровым датчиком в том смысле что:
Аналоговый датчик - ето преобразователя с усилителем, а АЦП, регулятор и микроконтроллер являются внешними и они зависит выбор дизайнера. Как правило компенсация производится с помощью лазерной обрезке аналоговых схем внутри сенсора.
Цифровые датчики - ето тот же аналогового преобразователя где усилитель, АЦП, микроконтроллер и регулятор внутренны. Компенсации здесь выполнены в виде коэффициентов в разных формулы каторы описывают аналоговые зависимости, как в аналоговом датчике.
Отсюда аналоговые датчики дают больше гибкости для дизайнера, чтобы выбрать АЦП, опорное питание, аналоговую фильтрацию и компенсации в случае необходимости так что может быть хуже или лучше от данного цифрового датчика, где параметры цифровых датчиков фиксировани.
Как я тебе уже сказал раньше и я стою на мое слово - из того что я видел до сих пор, твое понимание аналоговых схем очень ограничено, если не сказать что отсутствует. Оттуда у тебе есть много неправильных заблуждения о цифровой концепции поскольку они только представление аналоговых схем.
SashaMaks> Поскольку, применяется не очень быстрый ЦП, то делать много сложений не получится, поэтому лучше 10-бит АЦП, а не 12-бит, так как сложений меньше нужно, чтобы убрать шумы. Теперь самое главное - это деление. В простом суммировании для повышения точности делить совсем не обязательно, а для работы его алгоритма обязательно, иначе ничего не получится. Он и делает побитовый сдвиг суммы.
 Похоже, ты много не понимаеш и цифрового мира.
Похоже, ты много не понимаеш и цифрового мира.
- n побитовый сдвиг суммы справа ето деление на 2n
- Деление совсем обязательно чтобы убрать шумы
- Все, что ты описал это передискретизации которая я оптимизировал для более быстрого деления
Как я тебе уже объяснял - нет никакой разницы между аналоговым и цифровым датчиком в том смысле что:
Аналоговый датчик - ето преобразователя с усилителем, а АЦП, регулятор и микроконтроллер являются внешними и они зависит выбор дизайнера. Как правило компенсация производится с помощью лазерной обрезке аналоговых схем внутри сенсора.
Цифровые датчики - ето тот же аналогового преобразователя где усилитель, АЦП, микроконтроллер и регулятор внутренны. Компенсации здесь выполнены в виде коэффициентов в разных формулы каторы описывают аналоговые зависимости, как в аналоговом датчике.
Отсюда аналоговые датчики дают больше гибкости для дизайнера, чтобы выбрать АЦП, опорное питание, аналоговую фильтрацию и компенсации в случае необходимости так что может быть хуже или лучше от данного цифрового датчика, где параметры цифровых датчиков фиксировани.
Как я тебе уже сказал раньше и я стою на мое слово - из того что я видел до сих пор, твое понимание аналоговых схем очень ограничено, если не сказать что отсутствует. Оттуда у тебе есть много неправильных заблуждения о цифровой концепции поскольку они только представление аналоговых схем.
SashaMaks> Поскольку, применяется не очень быстрый ЦП, то делать много сложений не получится, поэтому лучше 10-бит АЦП, а не 12-бит, так как сложений меньше нужно, чтобы убрать шумы. Теперь самое главное - это деление. В простом суммировании для повышения точности делить совсем не обязательно, а для работы его алгоритма обязательно, иначе ничего не получится. Он и делает побитовый сдвиг суммы.
Похоже, ты много не понимаеш и цифрового мира. - n побитовый сдвиг суммы справа ето деление на 2n
- Деление совсем обязательно чтобы убрать шумы
- Все, что ты описал это передискретизации которая я оптимизировал для более быстрого деления
Это сообщение редактировалось 17.08.2016 в 21:27

SashaMaks> ...при таком уровне шумов его алгоритм работать не будет, т.е. надёжность будет настолько низкая, что почти ни одного успешного срабатывания программы не получить....
«неработающий» алгоритм pinko , как ни странно, прекрасно работает, что подтверждено многими пусками на разные, вполть до 2км, высоты. Единственный баг, который обнаружил Роки, pinko оперативно исправил.
«неработающий» алгоритм pinko , как ни странно, прекрасно работает, что подтверждено многими пусками на разные, вполть до 2км, высоты. Единственный баг, который обнаружил Роки, pinko оперативно исправил.

pinko> Саша, ето был пример для Брата как применить скользящее среднее с переменным окном в ATmega, чтобы обнаружить апогей более надежно для его водных ракет.
Нет, это всё было уже после.

pinko> Я сказал что скользящее среднее с переменным окном является одним из филтры, которые я использую в моей БРЭО и таким образом ты не видели исходный код, но думаеш что это все что есть в прошивке?
Всё правильно, ведь данные идёт с BMP180 с гораздо большим разбросом в целочисленном выражении по шумам и складывать нужно больше, а работа с этим датчиком на низкопроизводительной Меге и так осложнена пересчётами. Вот поэтому там и выбирали самый точный режим счёта на самом датчике + цифровой фильтр суммы с делением, чтобы твой алгоритм заработал. В итоге частота на выходе упала чуть ли не до 1Гц.
Нет, это всё было уже после.
Водяные ракеты и не только... • Просмотр темы - Цифровые датчики давления для высотомеров
Сообщения без ответов | Активные темы Список форумов » Конструкции » БРЭО Часовой пояс: UTC + 4 часа Список форумов » Конструкции » БРЭО Часовой пояс: UTC + 4 часа Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 2 // waterrocket.rupinko> Я сказал что скользящее среднее с переменным окном является одним из филтры, которые я использую в моей БРЭО и таким образом ты не видели исходный код, но думаеш что это все что есть в прошивке?
Всё правильно, ведь данные идёт с BMP180 с гораздо большим разбросом в целочисленном выражении по шумам и складывать нужно больше, а работа с этим датчиком на низкопроизводительной Меге и так осложнена пересчётами. Вот поэтому там и выбирали самый точный режим счёта на самом датчике + цифровой фильтр суммы с делением, чтобы твой алгоритм заработал. В итоге частота на выходе упала чуть ли не до 1Гц.
pinko> Как я тебе уже объяснял - нет никакой разницы между аналоговым и цифровым датчиком в том смысле что:
Я вообще не про разницу писал, а про логику построения твоего алгоритма и схемы для него.
pinko> Как я тебе уже сказал раньше и я стою на мое слово - из того что я видел до сих пор, твое понимание аналоговых схем очень ограничено
Ты бы хотя бы попытался вникнуть в написанное. Я-ж не с потолка это взял, тоже сидел разбирался. Но так, конечно, до сотрудничества ещё очень далеко...
pinko> Похоже, ты много не понимаеш и цифрового мира.
О, ещё новенькое.
pinko> - n побитовый сдвиг суммы справа ето деление на 2n
Я и писал про деление, не важно, как оно выглядит.
pinko> - Деление совсем обязательно чтобы убрать шумы
Обязательно или не обязательно. Конечно, можно применить другой фильтр, но всё написанное было именно к сложению, указанного кода.
Я вообще не про разницу писал, а про логику построения твоего алгоритма и схемы для него.
pinko> Как я тебе уже сказал раньше и я стою на мое слово - из того что я видел до сих пор, твое понимание аналоговых схем очень ограничено
Ты бы хотя бы попытался вникнуть в написанное. Я-ж не с потолка это взял, тоже сидел разбирался. Но так, конечно, до сотрудничества ещё очень далеко...
pinko>
Похоже, ты много не понимаеш и цифрового мира. О, ещё новенькое.
pinko> - n побитовый сдвиг суммы справа ето деление на 2n
Я и писал про деление, не важно, как оно выглядит.
pinko> - Деление совсем обязательно чтобы убрать шумы
Обязательно или не обязательно. Конечно, можно применить другой фильтр, но всё написанное было именно к сложению, указанного кода.
Skyangel> «неработающий» алгоритм pinko , как ни странно, прекрасно работает, что подтверждено многими пусками на разные, вполть до 2км, высоты. Единственный баг, который обнаружил Роки, pinko оперативно исправил.
Вот этот баг, который был у CRC он не прошёл:

Я даже более скажу, он вообще не способен работать с таким сигналом. Сбои идут уже в состоянии покоя, т.е. ложное срабатывание на старт. Нужен фильтр или сложение, но цель того сравнения была другая - использование исходного сигнала.
Речь вообще не идёт о "работающий"/"не работающий" речь идёт о надёжности. Об этом я писал тут:

Вот этот баг, который был у CRC он не прошёл:
Запуски ракет и испытания [SashaMaks#14.07.16 17:57]
… Сделал тестирование двух различных алгоритмов для БРЭО на основе атмосферного датчика давления. Всё очень просто, взял исходные данные давлений с полётных устройств, которые обрабатываются логикой полётных алгоритмов для спасения ракеты, и просто подпихнул их в свой симулятор так, что все данные по времени и давлению брались исключительно с исходной табулированной функции, которая загружалась из предварительно сохранённых файлов с практическими полётными данными. Т.е. мой алгоритм получал те…// РакетомодельныйЯ даже более скажу, он вообще не способен работать с таким сигналом. Сбои идут уже в состоянии покоя, т.е. ложное срабатывание на старт. Нужен фильтр или сложение, но цель того сравнения была другая - использование исходного сигнала.
Речь вообще не идёт о "работающий"/"не работающий" речь идёт о надёжности. Об этом я писал тут:
Использование твердотельных гироскопов в ракетомоделях [SashaMaks#17.08.16 15:13]
… На этом основан принцип работы алгоритмов pinko. Он жертвует точностью измерения во времени в угоду работоспособности, но не аппаратура не алгоритм всё равно не защищены от помех. Любое случайное воздействие и привет. Потому он сам и не делает платы, к ним тоже так повышаются требования, что в домашних условиях уже сложно будет добиться достаточного качества исполнения. Но случайные шумы выше допустимого всё равно могут возникнуть в любой момент при использовании - это как у…// Ракетомодельный
Skyangel>> «неработающий» алгоритм pinko , как ни странно, прекрасно работает, что подтверждено многими пусками на разные, вполть до 2км, высоты. Единственный баг, который обнаружил Роки, pinko оперативно исправил.
SashaMaks> Вот этот баг, который был у CRC он не прошёл:
Так там речь о ComFly, про брэо от pinko нет ни слова.
SashaMaks> Вот этот баг, который был у CRC он не прошёл:
Так там речь о ComFly, про брэо от pinko нет ни слова.
Skyangel> Так там речь о ComFly, про брэо от pinko нет ни слова.
Теперь есть. Собственно его код уже был там напечатан и протестирован отдельно. Но ему нужен был дополнительный фильтр, а то не равные условия сравнения получаются для этого видео. Как и в случае с Братом, где возвращали частоту, применив дополнительный фильтр - скользящее среднее. Но то был бы уже не алгоритм pinko. Я же изначально писал и сейчас пишу, зачем pinko фильтры и что это даёт, а чего нет.
Теперь есть. Собственно его код уже был там напечатан и протестирован отдельно. Но ему нужен был дополнительный фильтр, а то не равные условия сравнения получаются для этого видео. Как и в случае с Братом, где возвращали частоту, применив дополнительный фильтр - скользящее среднее. Но то был бы уже не алгоритм pinko. Я же изначально писал и сейчас пишу, зачем pinko фильтры и что это даёт, а чего нет.
- Xan [18.08.2016 06:02]: Перенос сообщений из Использование твердотельных гироскопов в ракетомоделях
- Xan [18.08.2016 06:08]: Перенос сообщений из Использование твердотельных гироскопов в ракетомоделях
SashaMaks> Ты не ответил:
SashaMaks> Стенд и оборудование для испытаний и измерений VIII [SashaMaks#07.09.16 23:46]
Как ты думаеш, сколько это моментного тока на обычного самодельного запала для ракетного двигателя в первые миллисекунды??
В зависимости от запала, который используется - ток может быть до 10-х амперы в первы милисекунд - что является достаточно, чтобы сделать хорошую искру между контактами реле и это может иметь и другие последствия для цепей.
SashaMaks> Для срабатывания реле нужны токи порядка десятков миллиампер.
SashaMaks> Для срабатывания полевых транзисторов достаточно токов порядка десятков наноампер.
Если ты не имееш ни малейшего представления о том, как надо использовать МОП-транзисторы и не знаеш что такое защитны резистор затвор-землю - да, он может переключиться на наноамперы, в противном случае с одного резистора если ты хочиш можно переключиться только на амперы.
Опять же ты понимаеш защитны резистор затвор-землю?
SashaMaks> Для непоправимого случая полностью и не нужно открывать. Но, чтобы и тут не было ухода от темы и передёргивания мной написанного я конкретизирую разницу между полевым транзистором и реле.
Другой вопрос в том, что ты не имееш ни малейшего представления также о зависимости напряжения затвора - сопротивление МОП-транзистора и ток, который может протекать через него.
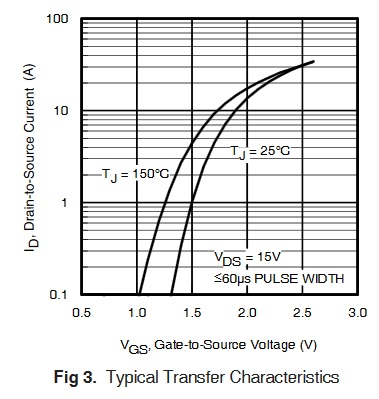
pinko>> П.с. Опять же твоя некомпетентность в этой теме - покажи мне модель полевого транзистора высокого тока с 1в полностью открытые затвора.
SashaMaks> IRLML6244
Еще один пример, что у тебе нет понятия аналоговых схем!

Саша, прочитай некоторые книги о аналоговой электроники, останови оконфузить себя!
SashaMaks> Стенд и оборудование для испытаний и измерений VIII [SashaMaks#07.09.16 23:46]
Как ты думаеш, сколько это моментного тока на обычного самодельного запала для ракетного двигателя в первые миллисекунды??
В зависимости от запала, который используется - ток может быть до 10-х амперы в первы милисекунд - что является достаточно, чтобы сделать хорошую искру между контактами реле и это может иметь и другие последствия для цепей.
SashaMaks> Для срабатывания реле нужны токи порядка десятков миллиампер.
SashaMaks> Для срабатывания полевых транзисторов достаточно токов порядка десятков наноампер.
Если ты не имееш ни малейшего представления о том, как надо использовать МОП-транзисторы и не знаеш что такое защитны резистор затвор-землю - да, он может переключиться на наноамперы, в противном случае с одного резистора если ты хочиш можно переключиться только на амперы. Опять же ты понимаеш защитны резистор затвор-землю?
SashaMaks> Для непоправимого случая полностью и не нужно открывать. Но, чтобы и тут не было ухода от темы и передёргивания мной написанного я конкретизирую разницу между полевым транзистором и реле.
Другой вопрос в том, что ты не имееш ни малейшего представления также о зависимости напряжения затвора - сопротивление МОП-транзистора и ток, который может протекать через него.
pinko>> П.с. Опять же твоя некомпетентность в этой теме - покажи мне модель полевого транзистора высокого тока с 1в полностью открытые затвора.
SashaMaks> IRLML6244
Еще один пример, что у тебе нет понятия аналоговых схем!
Саша, прочитай некоторые книги о аналоговой электроники, останови оконфузить себя!
pinko>
Pinko, не надо спорить, остановись.
Pinko, не надо спорить, остановись.
- Xan [08.09.2016 18:55]: Административное предупреждение: Xan#08.09.16 18:55
pinko>>
Xan> Pinko, не надо спорить, остановись.
Понял, спасибо за напоминание!
Xan> Pinko, не надо спорить, остановись.
Понял, спасибо за напоминание!
Сообщение было перенесено из темы Стенд и оборудование для испытаний и измерений VIII.
Xan> (http://www.analog.com/media/en/.../data-sheets/AD7730_7730L.pdf)
Xan> стр 10 и 11
Xan> Там от режимов зависит.
Даташит на АЦП мне не интересен. Тут именно шумы с датчика интересуют.
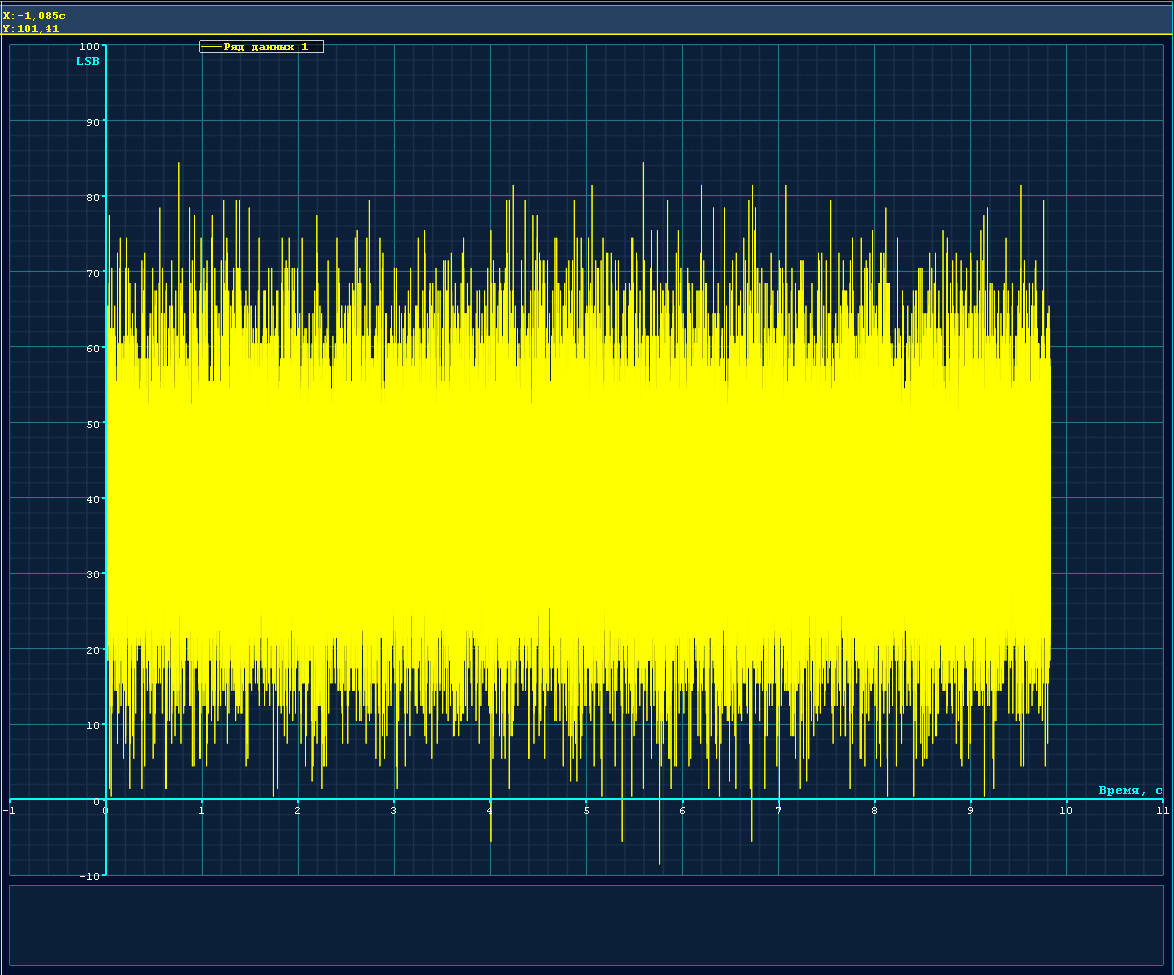
Xan> Вот сейчас минутный файл записал:
Xan> (https://www.dropbox.com/s/i6ifsftmjom56ci/2017-10-22_16-03-48.txt?dl=0)
И если это они, то получается где-то 80 LSB, что составляет 820 значений от всей шкалы. Или 410 различаемых значений на половину диапазона.
Вопрос: зачем 16-битный АЦП, если тут и 12-битного будет предостаточно и даже ещё лучше получится?
На STM 12-битный АЦП + его ЦП дают результат 10000 Гц и чувствительность 2 LSB или где-то 1000 различаемых значения на половину диапазона, что в 2,5 раза больше и без всяких отдельных АЦП + в 2 раза выше скорость измерения.
Xan> стр 10 и 11
Xan> Там от режимов зависит.
Даташит на АЦП мне не интересен. Тут именно шумы с датчика интересуют.
Xan> Вот сейчас минутный файл записал:
Xan> (https://www.dropbox.com/s/i6ifsftmjom56ci/2017-10-22_16-03-48.txt?dl=0)
И если это они, то получается где-то 80 LSB, что составляет 820 значений от всей шкалы. Или 410 различаемых значений на половину диапазона.
Вопрос: зачем 16-битный АЦП, если тут и 12-битного будет предостаточно и даже ещё лучше получится?
На STM 12-битный АЦП + его ЦП дают результат 10000 Гц и чувствительность 2 LSB или где-то 1000 различаемых значения на половину диапазона, что в 2,5 раза больше и без всяких отдельных АЦП + в 2 раза выше скорость измерения.
SashaMaks> И если это они, то получается где-то 80 LSB,
Как ты считаешь?!
У меня среднеквадратичное отклонение от среднего (13290.917) = 36.9297.
А высокочастотные шумы (имени не помню кого) = 13.086.
Это которые разность соседних в квадрате пополам.
SashaMaks> что составляет 820 значений от всей шкалы.
Вся шкала = 215 = 32768.
Это когда датчик выдаёт 2 мВ/В * 5 вольт = 10 милливольт.
Среднеквадратичные получаются 36.9297 / 32768 = 0.001127 от шкалы = 11.27 микровольт.
SashaMaks> На STM 12-битный АЦП + его ЦП дают результат 10000 Гц и чувствительность 2 LSB
Сколько микровольт шумы?
Подозреваю, что около 5000 микровольт.
Тензодатчик выдаёт сигнал в микровольтах, а не в LSB.
Как ты считаешь?!
У меня среднеквадратичное отклонение от среднего (13290.917) = 36.9297.
А высокочастотные шумы (имени не помню кого) = 13.086.
Это которые разность соседних в квадрате пополам.
SashaMaks> что составляет 820 значений от всей шкалы.
Вся шкала = 215 = 32768.
Это когда датчик выдаёт 2 мВ/В * 5 вольт = 10 милливольт.
Среднеквадратичные получаются 36.9297 / 32768 = 0.001127 от шкалы = 11.27 микровольт.
SashaMaks> На STM 12-битный АЦП + его ЦП дают результат 10000 Гц и чувствительность 2 LSB
Сколько микровольт шумы?
Подозреваю, что около 5000 микровольт.
Тензодатчик выдаёт сигнал в микровольтах, а не в LSB.
SashaMaks>> И если это они, то получается где-то 80 LSB,
Xan> Как ты считаешь?!
См. рис. Я даже не считал, а посмотрел на график. Разброс 80 LSB за 10 сек.
Xan> У меня среднеквадратичное отклонение от среднего (13290.917) = 36.9297.
Нет, я не фильтровал и вообще никаких математических операций не делал, только голые фактические измеренные данные, как есть, которые ты предоставил, причём ещё не все. Под нагрузкой нету.
Xan> Сколько микровольт шумы?
Я этого не мерил.
Xan> Тензодатчик выдаёт сигнал в микровольтах, а не в LSB.
А меня интересовало, сколько будет на выходе измерительная точность всего готового устройства (прибора), а не количество измеренных мВ в АЦП.
Xan> Как ты считаешь?!
См. рис. Я даже не считал, а посмотрел на график. Разброс 80 LSB за 10 сек.
Xan> У меня среднеквадратичное отклонение от среднего (13290.917) = 36.9297.
Нет, я не фильтровал и вообще никаких математических операций не делал, только голые фактические измеренные данные, как есть, которые ты предоставил, причём ещё не все. Под нагрузкой нету.
Xan> Сколько микровольт шумы?
Я этого не мерил.
Xan> Тензодатчик выдаёт сигнал в микровольтах, а не в LSB.
А меня интересовало, сколько будет на выходе измерительная точность всего готового устройства (прибора), а не количество измеренных мВ в АЦП.
Прикреплённые файлы:

SashaMaks> А меня интересовало, сколько будет на выходе измерительная точность всего готового устройства (прибора), а не количество измеренных мВ в АЦП.
Добрый день.
Исходя из моего опыта построения стенда, без учета дрейфа тензодатчика, максимум 10 бит, с учетом дрейфа, уверенно 8 бит, из возможных 12.
С уважением, irfps.
Добрый день.
Исходя из моего опыта построения стенда, без учета дрейфа тензодатчика, максимум 10 бит, с учетом дрейфа, уверенно 8 бит, из возможных 12.
С уважением, irfps.
irfps> Исходя из моего опыта построения стенда, без учета дрейфа тензодатчика, максимум 10 бит
Ну это ЦП слабоват и скоростельность самого АЦП хромает.
irfps> с учетом дрейфа, уверенно 8 бит, из возможных 12.
Со стабилизатором напряжения будет лучше.
Ну это ЦП слабоват и скоростельность самого АЦП хромает.
irfps> с учетом дрейфа, уверенно 8 бит, из возможных 12.
Со стабилизатором напряжения будет лучше.
Xan>> Как ты считаешь?!
SashaMaks> См. рис. Я даже не считал, а посмотрел на график. Разброс 80 LSB за 10 сек.
Не поленюсь повторить отличие "мнения" от "знания".
Вот все здесь присутствующие знают арифметику. Надеюсь!
И вот приходит человек и говорит:
-- Имею твёрдое МНЕНИЕ, что официальная наука нас обманывает и три плюс пять будет одиннадцать!
На что каждый ЗНАЮЩИЙ арифметику может ответить:
-- Возьми своё мнение, сверни в трубочку и засунь его себе... куда-нибудь.
Саша, ну это ж простенькая классическая детская программка для подсчёта среднеквадратичного.
Тюк-тюк по клавишам, и вот уже не надо, чтоб тебе какое-то "мнение" мнилось.
А получаешь полноценное знание.
SashaMaks> Под нагрузкой нету.
Зачем тебе под нагрузкой?
Какой смысл?
Да и 200 кг у меня так запросто под рукой нет.
SashaMaks> А меня интересовало, сколько будет на выходе измерительная точность всего готового устройства (прибора), а не количество измеренных мВ в АЦП.
Ну и сколько?
SashaMaks> См. рис. Я даже не считал, а посмотрел на график. Разброс 80 LSB за 10 сек.
Не поленюсь повторить отличие "мнения" от "знания".
Вот все здесь присутствующие знают арифметику. Надеюсь!

И вот приходит человек и говорит:
-- Имею твёрдое МНЕНИЕ, что официальная наука нас обманывает и три плюс пять будет одиннадцать!
На что каждый ЗНАЮЩИЙ арифметику может ответить:
-- Возьми своё мнение, сверни в трубочку и засунь его себе... куда-нибудь.
Саша, ну это ж простенькая классическая детская программка для подсчёта среднеквадратичного.
Тюк-тюк по клавишам, и вот уже не надо, чтоб тебе какое-то "мнение" мнилось.
А получаешь полноценное знание.
SashaMaks> Под нагрузкой нету.
Зачем тебе под нагрузкой?
Какой смысл?
Да и 200 кг у меня так запросто под рукой нет.
SashaMaks> А меня интересовало, сколько будет на выходе измерительная точность всего готового устройства (прибора), а не количество измеренных мВ в АЦП.
Ну и сколько?
irfps> Исходя из моего опыта построения стенда,
Исходя из моего опыта построения промышленных весов...
Исходя из моего опыта построения промышленных весов...
Реклама Google — средство выживания форумов :)
Xan> А получаешь полноценное знание.
Так и так всё видно без средних значений. Это для частоты 4800, как ты указал, усредняя придётся пересчитывать много на новую частоту. Не вижу в этом никакого смысла.
П.С. И не надо переходить на личности.
Xan> Зачем тебе под нагрузкой?
Xan> Какой смысл?
Есть ещё помехи от "звона" - это когда упругость материала датчика мала. Они обычно больше тех, что в покое.
Xan> Да и 200 кг у меня так запросто под рукой нет.
Можно взять тензодатчик на 1кгс от маленьких весов. Ты сам писал, что можешь любой подключить.
Xan> Ну и сколько?
Я уже писал, что 1/1000 на половинном диапазоне или 1/2000 на всем при частоте измерений 10кГц.
Так и так всё видно без средних значений. Это для частоты 4800, как ты указал, усредняя придётся пересчитывать много на новую частоту. Не вижу в этом никакого смысла.
П.С. И не надо переходить на личности.
Xan> Зачем тебе под нагрузкой?
Xan> Какой смысл?
Есть ещё помехи от "звона" - это когда упругость материала датчика мала. Они обычно больше тех, что в покое.
Xan> Да и 200 кг у меня так запросто под рукой нет.
Можно взять тензодатчик на 1кгс от маленьких весов. Ты сам писал, что можешь любой подключить.
Xan> Ну и сколько?
Я уже писал, что 1/1000 на половинном диапазоне или 1/2000 на всем при частоте измерений 10кГц.
Copyright © Balancer 1997..2019
Создано 18.05.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 18.05.2009
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

{kind=link}