-
![[image]](https://www.balancer.ru/cache/sites/com/li/livejournal/pics/ic/suvorow_/713896/2499/128x128-crop/2499_original.jpg)
Использование твердотельных гироскопов в ракетомоделях
Теги:
 SashaMaks
SashaMaks

mihail66> Как только ракета начала подниматься (скорость еще близка к нулевой), сколько регистрирует акселерометр?
Показания акселерометра в полёте, начиная со старта, будут +G, поэтому нужно вычитать -G из них.
В апогее он ничего соответственно не покажет.
А на старте завысит тягу на G.
Показания акселерометра в полёте, начиная со старта, будут +G, поэтому нужно вычитать -G из них.
В апогее он ничего соответственно не покажет.
А на старте завысит тягу на G.


 инфо
инфо инструменты
инструменты
mihail66> 1. Ракета на стартовой позиции (имеет точку опоры), акселерометр регистрирует 1g.
mihail66> Как только ракета начала подниматься (скорость еще близка к нулевой), сколько регистрирует акселерометр?
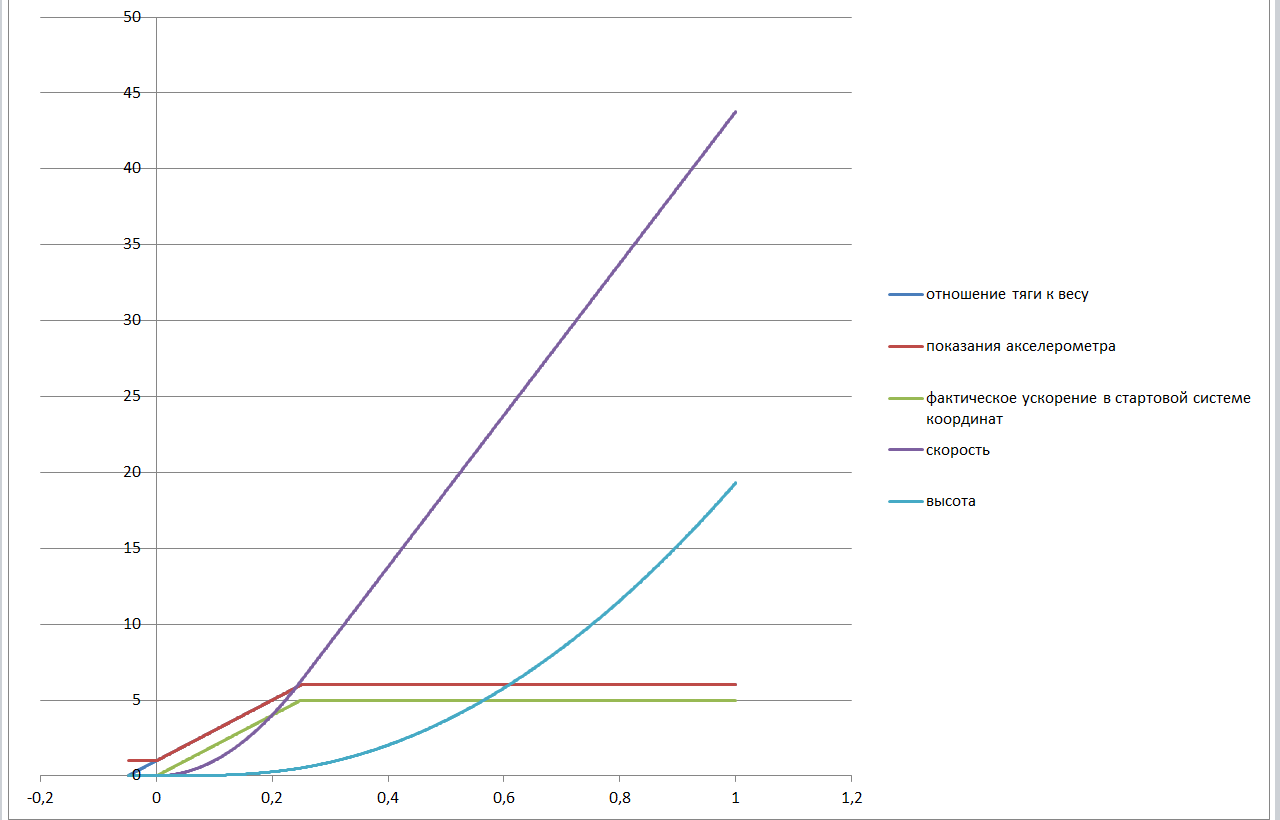
Ниже симулированный, но, в принципе, типичный график первой секунды полёта. Тяга двигателя нарастает линейно от 0 до 6-кратного веса ракеты, дальше держится постоянной. Ускорения в "же", которое принято 10 м/с2, скорость в м/с, высота в м.
Пока тяга растёт линейно, скорость является квадратичной параболой, а высота - кубической. Когда тяга становится константой, высота растёт квадратично, а скорость - линейно.
mihail66> Как только ракета начала подниматься (скорость еще близка к нулевой), сколько регистрирует акселерометр?
Ниже симулированный, но, в принципе, типичный график первой секунды полёта. Тяга двигателя нарастает линейно от 0 до 6-кратного веса ракеты, дальше держится постоянной. Ускорения в "же", которое принято 10 м/с2, скорость в м/с, высота в м.
Пока тяга растёт линейно, скорость является квадратичной параболой, а высота - кубической. Когда тяга становится константой, высота растёт квадратично, а скорость - линейно.
Прикреплённые файлы:
mihail66> 2. Ракета подлетела к апогею (вертикально, без наклона в горизонт, скорость ~ноль), сколько регистрирует акселерометр?
Акселерометр регистрирует ноль. Но не только в апогее, перед апогеем и после апогея тоже ноль - всё время, пока ракета слабо тормозится воздухом, акселерометр показывает шум. А он у дешёвых акселерометров довольно значителен.
Акселерометр регистрирует ноль. Но не только в апогее, перед апогеем и после апогея тоже ноль - всё время, пока ракета слабо тормозится воздухом, акселерометр показывает шум. А он у дешёвых акселерометров довольно значителен.

SashaMaks> Показания акселерометра в полёте, начиная со старта, будут +G, поэтому нужно вычитать -G из них.
Ну слава богу, все прекрасно, именно так как я и считаю.
Мне напрочь не надо знать о величине реального ускорения, моя электроника оперирует данными от акселерометра в ракете, и знаками ± этого ускорения.
Ну слава богу, все прекрасно, именно так как я и считаю.
Мне напрочь не надо знать о величине реального ускорения, моя электроника оперирует данными от акселерометра в ракете, и знаками ± этого ускорения.

Б.г.> Акселерометр регистрирует ноль. Но не только в апогее, перед апогеем и после апогея тоже ноль - всё время, пока ракета слабо тормозится воздухом, акселерометр показывает шум. А он у дешёвых акселерометров довольно значителен.
Т.е. уже не тормозится воздухом.
Все прекрасно, вопрос с апогеем мной был задан просто для сравнения.
Моему БРЭО данные от акселерометра в апогее уже не интересны.
Хотел лишь подтвердить правильность своего восприятия событий.
Всем спасибо!
Т.е. уже не тормозится воздухом.
Все прекрасно, вопрос с апогеем мной был задан просто для сравнения.
Моему БРЭО данные от акселерометра в апогее уже не интересны.
Хотел лишь подтвердить правильность своего восприятия событий.
Всем спасибо!
Б.г.> Ниже симулированный, но, в принципе, типичный график первой секунды полёта. Тяга двигателя нарастает линейно от 0 до 6-кратного веса ракеты, дальше держится постоянной. Ускорения в "же", которое принято 10 м/с2, скорость в м/с, высота в м.
Я так понимаю что это какой-то абсолютизированный график, где при постоянной тяге двигателя ускорение не изменяется.
Т.е. масса ракеты не меняется, и воздуха нет.
Я так понимаю что это какой-то абсолютизированный график, где при постоянной тяге двигателя ускорение не изменяется.
Т.е. масса ракеты не меняется, и воздуха нет.
Б.г.>> Ниже симулированный ... график первой секунды полёта. Тяга двигателя нарастает линейно от 0 до 6-кратного веса ракеты, дальше держится постоянной. Ускорения в "же", которое принято 10 м/с2, скорость в м/с, высота в м.
mihail66> Я так понимаю что это какой-то абсолютизированный график, где при постоянной тяге двигателя ускорение не изменяется.
mihail66> Т.е. масса ракеты не меняется, и воздуха нет.
Ну, или уменьшение массы как раз компенсирует увеличение сопротивления воздуха") Или уменьшение тяги
Или уменьшение тяги  Там абсолютной-то тяги, как раз, и нет, только тяговооружённость.
Там абсолютной-то тяги, как раз, и нет, только тяговооружённость.
Это симуляция, написанная за минуту на экселе.
Сопротивление воздуха пропорционально квадрату скорости. Зато экспоненциально уменьшается с высотой.
mihail66> Я так понимаю что это какой-то абсолютизированный график, где при постоянной тяге двигателя ускорение не изменяется.
mihail66> Т.е. масса ракеты не меняется, и воздуха нет.
Ну, или уменьшение массы как раз компенсирует увеличение сопротивления воздуха
") Или уменьшение тяги
Или уменьшение тяги  Там абсолютной-то тяги, как раз, и нет, только тяговооружённость.
Там абсолютной-то тяги, как раз, и нет, только тяговооружённость.Это симуляция, написанная за минуту на экселе.
Сопротивление воздуха пропорционально квадрату скорости. Зато экспоненциально уменьшается с высотой.
Б.г.> Сопротивление воздуха пропорционально квадрату скорости. Зато экспоненциально уменьшается с высотой.
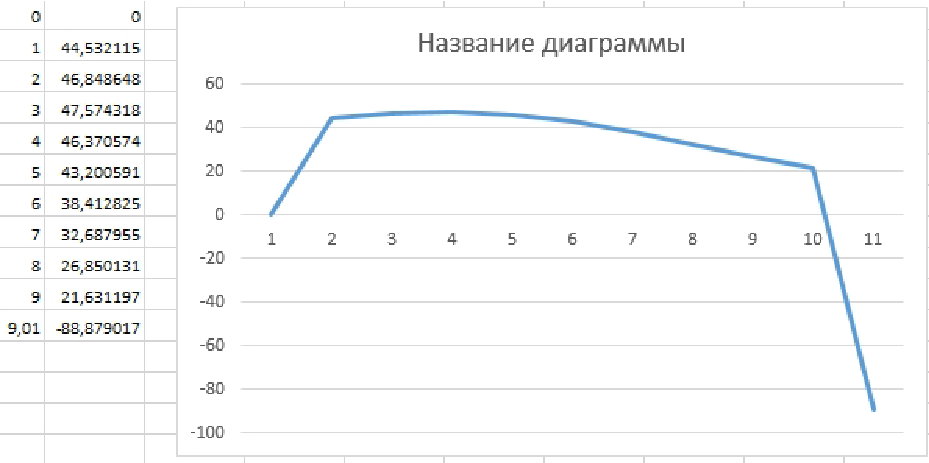
Да я просто такую тягу просимулировал в проге у Рокки длительностью 9 сек.
У меня получилось что первые 3 сек. (пока скорость низкая) ускорение растет.
А потом постепенно падает.
Да я просто такую тягу просимулировал в проге у Рокки длительностью 9 сек.
У меня получилось что первые 3 сек. (пока скорость низкая) ускорение растет.
А потом постепенно падает.
Прикреплённые файлы:
Б.г.>> Сопротивление воздуха пропорционально квадрату скорости. Зато экспоненциально уменьшается с высотой.
mihail66> Да я просто такую тягу просимулировал в проге у Рокки длительностью 9 сек.
mihail66> У меня получилось что первые 3 сек.
Я вообще только первую секунду рассматривал, потому что вопрос был именно о моменте отрыва от стартового стола. Там, на самом деле, переходной процесс значительно более сложен, т.е. для больших ракет есть ещё упругость опоры, на которой они стоят, и, реально, движение начинается раньше, чем тяга сравняется с весом, просто из-за упругости опор - они разгружаются и распрямляются. Это происходит без отрыва, но движение уже можно зарегистрировать чувствительным датчиком, например, лазерным.
"Семёрка", например, заметно качается при переходе с предварительной ступени на промежуточную, т.к. у неё фермы имеют значительную длину, по сравнению с опорами других больших ракет, от Фау-2 до Сатурна-5.
Только у последних Сатурнов-1Б, использованных в полётах к Скайлэбу и "Союз-Аполлон" была похожая ситуация - ракета стартовала с гигантской "табуретки", и, в результате, "подпрыгивала" вместе с ней ещё заметнее.

mihail66> Да я просто такую тягу просимулировал в проге у Рокки длительностью 9 сек.
mihail66> У меня получилось что первые 3 сек.
Я вообще только первую секунду рассматривал, потому что вопрос был именно о моменте отрыва от стартового стола. Там, на самом деле, переходной процесс значительно более сложен, т.е. для больших ракет есть ещё упругость опоры, на которой они стоят, и, реально, движение начинается раньше, чем тяга сравняется с весом, просто из-за упругости опор - они разгружаются и распрямляются. Это происходит без отрыва, но движение уже можно зарегистрировать чувствительным датчиком, например, лазерным.
"Семёрка", например, заметно качается при переходе с предварительной ступени на промежуточную, т.к. у неё фермы имеют значительную длину, по сравнению с опорами других больших ракет, от Фау-2 до Сатурна-5.
Только у последних Сатурнов-1Б, использованных в полётах к Скайлэбу и "Союз-Аполлон" была похожая ситуация - ракета стартовала с гигантской "табуретки", и, в результате, "подпрыгивала" вместе с ней ещё заметнее.

Это сообщение редактировалось 29.03.2018 в 15:28
https://ru.wikipedia.org/wiki/%D0%90%D0%BF%D0%BE%D0%BB%D0%BB%D0%BE%D0%BD_(%D0%AD%D0%9F%D0%90%D0%A1)#/media/File:Apollo-Soyuz_Test_Project_Saturn_IB_launch.jpg
Спасибо, интересно.
Просто очень заинтересовало почему "кривая" ускорения прямая.
Спасибо, интересно.
Просто очень заинтересовало почему "кривая" ускорения прямая.
mihail66> Спасибо, интересно.
только всё это не про гироскопы, а про акселерометры, и в этой теме несколько оффтопик
А, вернувшись к теме автоматической коррекции нуля гироскопов во время движения, могу резюмировать, что у человека, программу которого я разбирал, был ну очень плохой гироскоп
У моего вообще не выходит корректировать ноль так, как предлагается. Достоверность сигнала угловой скорости получается выше, чем достоверность сигнала продифференцированных боковых ускорений раньше, чем эти сигналы вылезут из шумов, при старте с любым разумным ускорением, например, 1,25 же, и длительности переходного процесса (набора тяги от 1 до 1,25 веса) 0,2 секунды.
Среднеквадратичное значение шума угловой скорости у ADIS16460 - 9,5 LSB по оси X и 13 LSB по осям Y и Z (LSB=0,005 градуса в секунд), а медианное значение скорости дрейфа нуля примерно 2,6 LSB в секунду, т.е. на 2048 сэмплов, что даст 0,0013 LSB на сэмпл. Но это - на коротких интервалах порядка 1 секунды! Чем больше интервал - тем меньше медианная скорость дрейфа. Вплоть до 1000 секунд она уменьшается.
У встроенных акселерометров среднеквадратичный шум около 20 LSB (то есть, 5 миллиже), то есть, 0,005 миллирадиан на сэмпл, или 0,28 градуса. Чтобы "додавить" такой шум до величины дрейфа гироскопа, надо усреднять данные хотя бы 10000 сэмплов, или 5 секунд.
В общем, мир вернулся на место.
только всё это не про гироскопы, а про акселерометры, и в этой теме несколько оффтопик
А, вернувшись к теме автоматической коррекции нуля гироскопов во время движения, могу резюмировать, что у человека, программу которого я разбирал, был ну очень плохой гироскоп
У моего вообще не выходит корректировать ноль так, как предлагается. Достоверность сигнала угловой скорости получается выше, чем достоверность сигнала продифференцированных боковых ускорений раньше, чем эти сигналы вылезут из шумов, при старте с любым разумным ускорением, например, 1,25 же, и длительности переходного процесса (набора тяги от 1 до 1,25 веса) 0,2 секунды.
Среднеквадратичное значение шума угловой скорости у ADIS16460 - 9,5 LSB по оси X и 13 LSB по осям Y и Z (LSB=0,005 градуса в секунд), а медианное значение скорости дрейфа нуля примерно 2,6 LSB в секунду, т.е. на 2048 сэмплов, что даст 0,0013 LSB на сэмпл. Но это - на коротких интервалах порядка 1 секунды! Чем больше интервал - тем меньше медианная скорость дрейфа. Вплоть до 1000 секунд она уменьшается.
У встроенных акселерометров среднеквадратичный шум около 20 LSB (то есть, 5 миллиже), то есть, 0,005 миллирадиан на сэмпл, или 0,28 градуса. Чтобы "додавить" такой шум до величины дрейфа гироскопа, надо усреднять данные хотя бы 10000 сэмплов, или 5 секунд.
В общем, мир вернулся на место.
Б.г.> про гироскопы
У меня вчера интегрирование в кватернионах заработало, причём, я сделал с фиксированной точкой, чтобы не включать плавучку. Внутреннее представление 2.30, т.е. я экономлю 6 бит точности, по сравнению с плавучкой одинарной точности, где 24 разрядная мантисса и 8-разрядная степень.
Кто скажет, на сколько градусов крутанулся столик, по картинке?
У меня вчера интегрирование в кватернионах заработало, причём, я сделал с фиксированной точкой, чтобы не включать плавучку. Внутреннее представление 2.30, т.е. я экономлю 6 бит точности, по сравнению с плавучкой одинарной точности, где 24 разрядная мантисса и 8-разрядная степень.
Кто скажет, на сколько градусов крутанулся столик, по картинке?
Прикреплённые файлы:


Б.г.> Кто скажет, на сколько градусов крутанулся столик, по картинке?
Праздник же!
Один неполный оборот и пол-оборота назад?
Праздник же!
Один неполный оборот и пол-оборота назад?

Б.г.>> Кто скажет, на сколько градусов крутанулся столик, по картинке?
Полл> Праздник же!
и, чо, все уже на грудь приняли с утра?
Полл> Один неполный оборот и пол-оборота назад?
Нет, в формулах кватернионов половинные углы, изменение w с 1 на -1 - это поворот на 360 градусов, на ещё 360 не дал крутануть завернувшийся кабель. И дальше почти полный оборот назад.
У кватернионов период, таким образом, не 2 пи, а 4 пи. Т.е. чтобы w дошёл опять до 1, надо на 720 градусов прокрутить.
Полл> Праздник же!
и, чо, все уже на грудь приняли с утра?
Полл> Один неполный оборот и пол-оборота назад?
Нет, в формулах кватернионов половинные углы, изменение w с 1 на -1 - это поворот на 360 градусов, на ещё 360 не дал крутануть завернувшийся кабель. И дальше почти полный оборот назад.
У кватернионов период, таким образом, не 2 пи, а 4 пи. Т.е. чтобы w дошёл опять до 1, надо на 720 градусов прокрутить.
Полл>> Праздник же!
Б.г.> и, чо, все уже на грудь приняли с утра?
Один ты тормозишь, понимаешь!
Полл>> Один неполный оборот и пол-оборота назад?
Б.г.> Нет, в формулах кватернионов половинные углы, изменение w с 1 на -1 - это поворот на 360 градусов, на ещё 360 не дал крутануть завернувшийся кабель. И дальше почти полный оборот назад.
Б.г.> У кватернионов период, таким образом, не 2 пи, а 4 пи. Т.е. чтобы w дошёл опять до 1, надо на 720 градусов прокрутить.
Ясно. "Кватернионы - это просто, том XIIV".
Б.г.> и, чо, все уже на грудь приняли с утра?
Один ты тормозишь, понимаешь!
Полл>> Один неполный оборот и пол-оборота назад?
Б.г.> Нет, в формулах кватернионов половинные углы, изменение w с 1 на -1 - это поворот на 360 градусов, на ещё 360 не дал крутануть завернувшийся кабель. И дальше почти полный оборот назад.
Б.г.> У кватернионов период, таким образом, не 2 пи, а 4 пи. Т.е. чтобы w дошёл опять до 1, надо на 720 градусов прокрутить.
Ясно. "Кватернионы - это просто, том XIIV".
Полл>>> Праздник же!
Б.г.>> и, чо, все уже на грудь приняли с утра?
Полл> Один ты тормозишь, понимаешь!
"До первой звезды нельзя!" © мой знаменитый однофамилец в одной знаменитой рекламе
Полл> Ясно. "Кватернионы - это просто, том XIIV".
Кватернионы - это ДОСТАТОЧНО просто, если иметь в виду только инженерные аспекты. Мой друг, Юра Афанасенков, взялся писать "ликбез по кватернионам". Надеялся уложиться в три главы, сейчас пишет десятую. Публикует в своём ЖЖ:
Б.г.>> и, чо, все уже на грудь приняли с утра?
Полл> Один ты тормозишь, понимаешь!
"До первой звезды нельзя!" © мой знаменитый однофамилец в одной знаменитой рекламе
Полл> Ясно. "Кватернионы - это просто, том XIIV".
Кватернионы - это ДОСТАТОЧНО просто, если иметь в виду только инженерные аспекты. Мой друг, Юра Афанасенков, взялся писать "ликбез по кватернионам". Надеялся уложиться в три главы, сейчас пишет десятую. Публикует в своём ЖЖ:
Б.г.> "До первой звезды нельзя!"
На Дальнем Востоке уже 10 вечера, так что мона!
Б.г.> Мой друг, Юра Афанасенков, взялся писать "ликбез по кватернионам".
По твоей наводке ранее, ты уже давал на него в какой-то теме ссылку, взялся его читать.
Вступление тоже из него.
На Дальнем Востоке уже 10 вечера, так что мона!
Б.г.> Мой друг, Юра Афанасенков, взялся писать "ликбез по кватернионам".
По твоей наводке ранее, ты уже давал на него в какой-то теме ссылку, взялся его читать.
Вступление тоже из него.


Полл>> Ясно. "Кватернионы - это просто, том XIIV".
Б.г.> Кватернионы - это ДОСТАТОЧНО просто
Ну, ладно.
Интегрирование работает. Нормирование тоже работает. Калибровка работает.
Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Пересчитывать в матрицы?
Б.г.> Кватернионы - это ДОСТАТОЧНО просто
Ну, ладно.
Интегрирование работает. Нормирование тоже работает. Калибровка работает.
Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Пересчитывать в матрицы?

Б.г.> Интегрирование работает. Нормирование тоже работает. Калибровка работает.
Поздравляю!
Б.г.> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Б.г.> Пересчитывать в матрицы?
Плохой способ. Тебе нужны всего лишь углы (или даже синусы) в собственной системе координат ракеты. Из кватерниона ты их знаешь точно, т.к. он позволяет хранить и преобразовывать поворот относительно любой оси.
Поздравляю!
Б.г.> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Б.г.> Пересчитывать в матрицы?
Плохой способ. Тебе нужны всего лишь углы (или даже синусы) в собственной системе координат ракеты. Из кватерниона ты их знаешь точно, т.к. он позволяет хранить и преобразовывать поворот относительно любой оси.

Sandro> Плохой способ. Тебе нужны всего лишь углы (или даже синусы) в собственной системе координат ракеты. Из кватерниона ты их знаешь точно, т.к. он позволяет хранить и преобразовывать поворот относительно любой оси.
Пока не равна нулю какая-нибудь одна из трёх компонент, она показывает именно что синус того угла (точнее, половины того угла), на который произошёл поворот. Но, когда они не равны нулю все три одновременно, то понять, куда и насколько энергично вертеть ракету, не очень-топонятно легко. Я ещё подумаю, да, да и у Юры в его опусе должны быть подсказки на эту тему.
Пока не равна нулю какая-нибудь одна из трёх компонент, она показывает именно что синус того угла (точнее, половины того угла), на который произошёл поворот. Но, когда они не равны нулю все три одновременно, то понять, куда и насколько энергично вертеть ракету, не очень-то
Это сообщение редактировалось 08.05.2018 в 09:56
Б.г.>> Интегрирование работает. Нормирование тоже работает. Калибровка работает.
Sandro> Поздравляю!
Б.г.>> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Б.г.>> Пересчитывать в матрицы?
Sandro> Плохой способ. Тебе нужны всего лишь углы (или даже синусы) в собственной системе координат ракеты. Из кватерниона ты их знаешь точно, т.к. он позволяет хранить и преобразовывать поворот относительно любой оси.
у меня получается, что, для того, чтобы разложить по 4 машинкам 3 компоненты вектора, всё равно нужно матричное умножение.
скоростные-то компоненты (в ПИД-е это будут дифференцирующие) можно брать прямо с гироскопа. А, вот, пропорциональные нужно высчитывать из компонент кватерниона, и понадобится матрица.
Sandro> Поздравляю!
Б.г.>> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Б.г.>> Пересчитывать в матрицы?
Sandro> Плохой способ. Тебе нужны всего лишь углы (или даже синусы) в собственной системе координат ракеты. Из кватерниона ты их знаешь точно, т.к. он позволяет хранить и преобразовывать поворот относительно любой оси.
у меня получается, что, для того, чтобы разложить по 4 машинкам 3 компоненты вектора, всё равно нужно матричное умножение.
скоростные-то компоненты (в ПИД-е это будут дифференцирующие) можно брать прямо с гироскопа. А, вот, пропорциональные нужно высчитывать из компонент кватерниона, и понадобится матрица.
Б.г.> Б.г.>> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Юра в 9-ой главе своего труда об этом пишет.

Юра в 9-ой главе своего труда об этом пишет.
Ликбез по кватернионам, часть 9
Интегрирование угловых скоростей с помощью кватернионов - Старик не согласен со мной. - Он вздохнул. – Немного отстал от жизни, вот в чем дело. Цепляется за свою обожаемую матричную механику, а этот вопрос требует более мощных математических средств. Он так упрям. … - Вы применили переходное… // nabbla1.livejournal.com
Б.г.>> Б.г.>> Но как от компонент кватерниона перейти к выходным сигналам на рулевые машинки?
Полл> Юра в 9-ой главе своего труда об этом пишет.
Не, то, что он пишет в 9-й главе, у меня всё уже реализовано и работает!
Я же спрашиваю вот о чем.
У меня есть 4 рулевых машинки, допустим, с пропорциональным управлением. Это неправда, но, допустим.
Как мне из 4 компонент кватерниона получить 4 сигнала отклонения рулевых машин?
Если придерживаться нотации, применённой ещё на Фау-2, то по тангажу управляют рулевые машины II и IV, а по рысканию I и III. По крену можно управлять как всеми четырьмя, так и двумя (так же, как и на Фау-2).
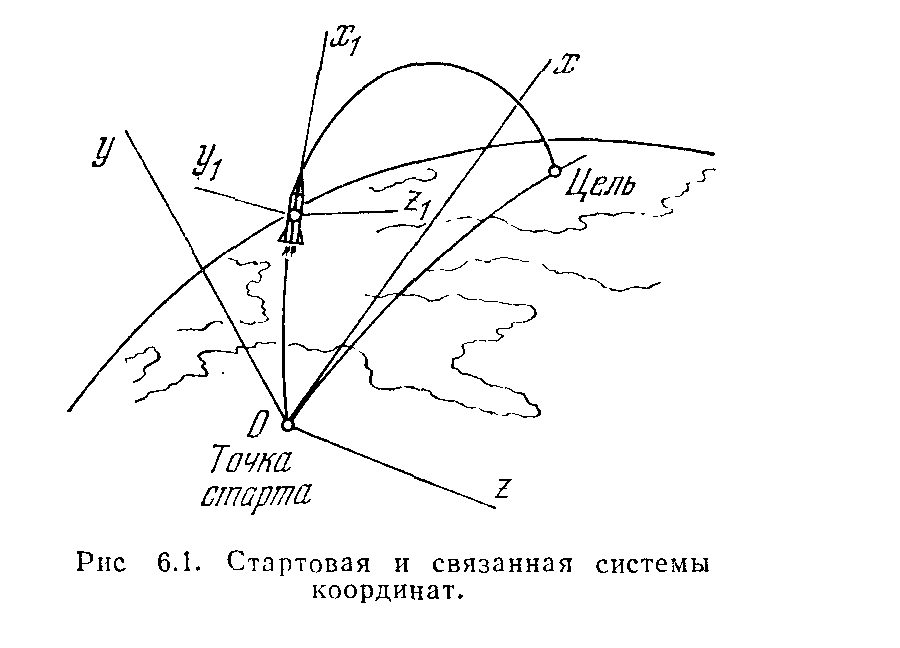
Если придерживаться американской нотации, то ось Z гироскопа - это ось крена, ось X - ось тангажа, а ось Y - рыскания. В советских расположение связанной системы координат другое - там Z1 - это тангаж, X1 - это крен, а Y1 - рыскание. См. приложенную картинку.
Но пока пусть будет по-американски. Если бы можно было придерживаться предположения о малости углов, то компонента X шла бы прямиком на рулевые машины II и IV, компонента Y - на рулевые машины I и III, а компонента Z с разными знаками суммировалась бы с предыдущими двумя.
Однако, предположение о малости углов работает только для крена и рыскания, а по тангажу ракета совершает программный разворот (одноступенчатая ракета градусов на 60, а космическая - больше, чем на 90, ну пусть будет ровно на 90). Кватернион к концу активного участка приобретает вид 0,7;0,71;0;0.
Это, как минимум, значит, что все значения, возникающие в каналах Y и Z надо делить на 0,7 (значение в канале W, скаляр, он же действительная часть), по дороге преобразования в управляющие воздействия. То же самое и в канале X, только там ещё предварительно надо вычитать целевую величину.
Полл> Юра в 9-ой главе своего труда об этом пишет.
Не, то, что он пишет в 9-й главе, у меня всё уже реализовано и работает!
Я же спрашиваю вот о чем.
У меня есть 4 рулевых машинки, допустим, с пропорциональным управлением. Это неправда, но, допустим.
Как мне из 4 компонент кватерниона получить 4 сигнала отклонения рулевых машин?
Если придерживаться нотации, применённой ещё на Фау-2, то по тангажу управляют рулевые машины II и IV, а по рысканию I и III. По крену можно управлять как всеми четырьмя, так и двумя (так же, как и на Фау-2).
Если придерживаться американской нотации, то ось Z гироскопа - это ось крена, ось X - ось тангажа, а ось Y - рыскания. В советских расположение связанной системы координат другое - там Z1 - это тангаж, X1 - это крен, а Y1 - рыскание. См. приложенную картинку.
Но пока пусть будет по-американски. Если бы можно было придерживаться предположения о малости углов, то компонента X шла бы прямиком на рулевые машины II и IV, компонента Y - на рулевые машины I и III, а компонента Z с разными знаками суммировалась бы с предыдущими двумя.
Однако, предположение о малости углов работает только для крена и рыскания, а по тангажу ракета совершает программный разворот (одноступенчатая ракета градусов на 60, а космическая - больше, чем на 90, ну пусть будет ровно на 90). Кватернион к концу активного участка приобретает вид 0,7;0,71;0;0.
Это, как минимум, значит, что все значения, возникающие в каналах Y и Z надо делить на 0,7 (значение в канале W, скаляр, он же действительная часть), по дороге преобразования в управляющие воздействия. То же самое и в канале X, только там ещё предварительно надо вычитать целевую величину.
Прикреплённые файлы:
Б.г.> у меня получается, что, для того, чтобы разложить по 4 машинкам 3 компоненты вектора, всё равно нужно матричное умножение.
Вот это вот читал? Заметки о вращении вектора кватернионом / Хабр
(Формулы я не проверял, но по виду похоже)
Вот это вот читал? Заметки о вращении вектора кватернионом / Хабр
(Формулы я не проверял, но по виду похоже)
Б.г.>> у меня получается, что, для того, чтобы разложить по 4 машинкам 3 компоненты вектора, всё равно нужно матричное умножение.
Sandro> Вот это вот читал? Заметки о вращении вектора кватернионом / Хабр
Sandro> (Формулы я не проверял, но по виду похоже)
Да, это я читал, и даже раньше, чем Юра начал свой опус. Не очень помогает.
Я хочу попробовать то же самое жульничество, которое я делал на атмеге три года назад - для программного разворота по тангажу корректировать (точнее, заведомо искажать) ноль гироскопа. Чтобы во время разворота по тангажу гироскоп считал, что ракета летит прямо.
Тогда целевое значение кватерниона всю дорогу будет равно 1;0;0;0, и формулы пересчёта в отклонения для рулевых машинок радикально упростятся.
Но остаётся вопрос, что и как делать при больших отклонениях по крену - там угловые скорости могут быть очень порядочными, по сравнению с угловыми скоростями по тангажу и рысканию. И, во-первых, у этого канала стабилизации другие настройки, во-вторых, по этому каналу, как правило, надо ставить отдельный датчик, т.к. основной может быть легко перегружен, а, в-третьих, за счёт вышеперечисленного кватернион может далеко уйти от 1;0;0;0. Правда, это всё равно легче, если х и у нули.
Sandro> Вот это вот читал? Заметки о вращении вектора кватернионом / Хабр
Sandro> (Формулы я не проверял, но по виду похоже)
Да, это я читал, и даже раньше, чем Юра начал свой опус. Не очень помогает.
Я хочу попробовать то же самое жульничество, которое я делал на атмеге три года назад - для программного разворота по тангажу корректировать (точнее, заведомо искажать) ноль гироскопа. Чтобы во время разворота по тангажу гироскоп считал, что ракета летит прямо.
Тогда целевое значение кватерниона всю дорогу будет равно 1;0;0;0, и формулы пересчёта в отклонения для рулевых машинок радикально упростятся.
Но остаётся вопрос, что и как делать при больших отклонениях по крену - там угловые скорости могут быть очень порядочными, по сравнению с угловыми скоростями по тангажу и рысканию. И, во-первых, у этого канала стабилизации другие настройки, во-вторых, по этому каналу, как правило, надо ставить отдельный датчик, т.к. основной может быть легко перегружен, а, в-третьих, за счёт вышеперечисленного кватернион может далеко уйти от 1;0;0;0. Правда, это всё равно легче, если х и у нули.
Copyright © Balancer 1997..2021
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.
Создано 14.12.2008
Связь с владельцами и администрацией сайта: anonisimov@gmail.com, rwasp1957@yandex.ru и admin@balancer.ru.

#/media/File:Apollo-Soyuz_Test_Project_Saturn_IB_launch.jpg){kind=link}